







模糊PID学习笔记
传统pid控制
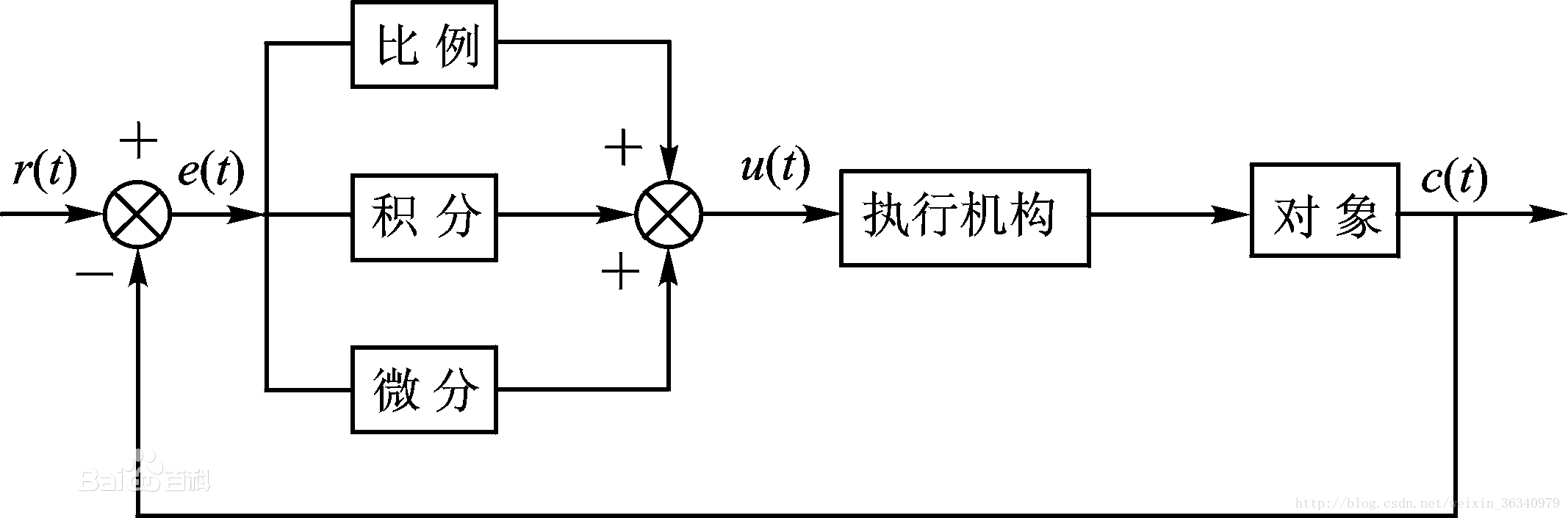
传统pid本质上时微分方程,p通过误差调节信号变化幅度,i加强P,也就是误差在系统中的作用,以增加精度,d通过上一次的误差差分得到信号的变化趋势,并抑制该趋势,该方法对非线性系统有很好的控制效果。
其公式可为
控制器输出
F ( t ) = P ∗ e r r o r ( t ) + I ∗ ∑ i = 0 t e r r o r ( i ) + D ∗ ( e r r o r ( t ) − e r r o r ( t − 1 ) ) F(t)=P*error(t)+ I*\sum_{i=0}^terror(i)+D*(error(t)-error(t-1)) F(t)=P∗error(t)+I∗i=0∑t
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 9万+
9万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









