









滤波的作用
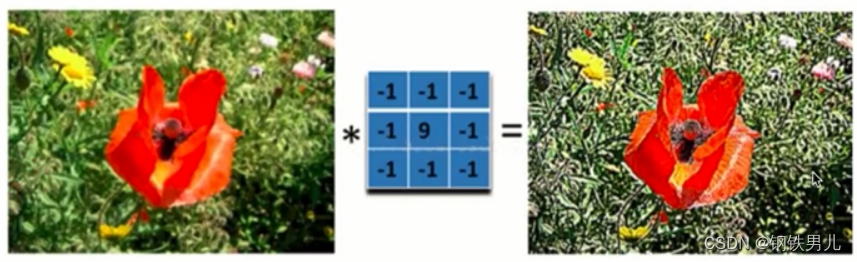
一副图像通过滤波器得到另一副图像;其中滤波器又称为卷积核,滤波的过程称为卷积。
图像卷积效果图
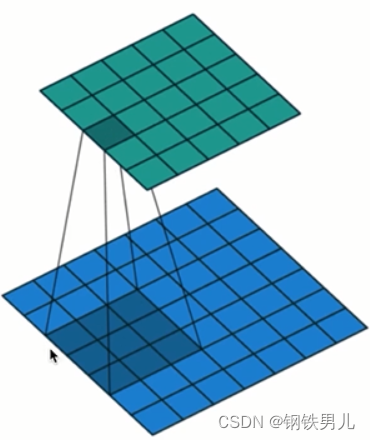
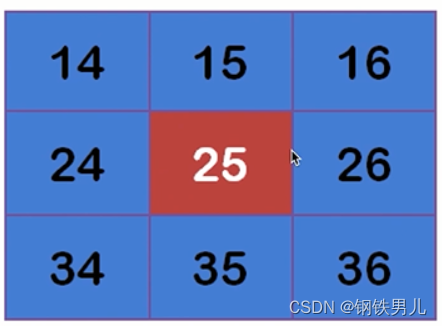
卷积的过程
一 卷积的几个基本概念
1 卷积核的大小
卷积核一般为奇数,如3X3,5X5,7X7等。
一方面是增加padding的原因。
另一面是保证锚点在中间,防止位置发生偏移的原因;
在深度学习中,卷积核越大,看到的信息(感受野)越多。提取的特征越好,同时计算量也就越大。
2 锚点

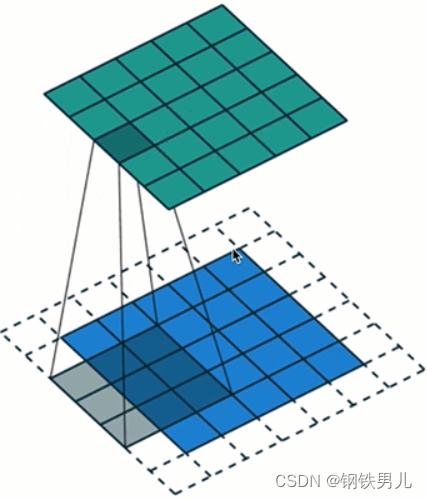
3 边界扩充
当卷积核打印1且不进行边界扩充,输出尺寸将相应缩小;
当卷积核以标准方式进行边界扩充,则输出数据的空间尺寸将与输入相等。
计算公式
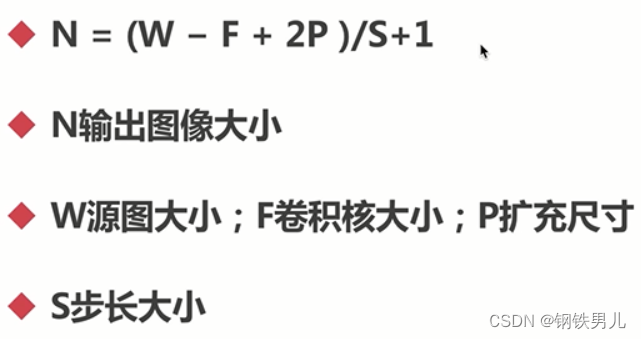
4 步长

5 低通滤波与高通滤波
低通滤波可以去除噪音或平滑图形;
高通滤波可以帮助查找图像的边缘;
filter2D(src,ddepth,kernel,anchor,delta,borderType)
一个简单的例子
二 拉普拉斯算子
可以同时求两个方向的边缘
对噪音敏感,一般需要先进行去噪再调用拉普拉斯。
Lapacian(img,ddepth
ksize=1,scale=1
borderType=BORDER_DEFAULT)
import cv2
import numpy as np
img=cv2.imread('./2037551.jpg')
# 索贝尔算子Y方向边缘
#d1=cv2.Scharr(img,cv2.CV_64F,1,0)
# 索贝尔算子X方向边缘
#d2=cv2.Scharr(img,cv2.CV_64F,0,1)
#拉普拉斯
ldst=cv2.Laplacian(img,cv2.CV_64F,ksize=5)
#dst=cv2.add(d1,d2)
cv2.imshow('img',img)
cv2.imshow('ldst',ldst)
cv2.waitKey(0)
三 边缘检测 Canny
使用5x5高斯滤波消除噪声
计算图像梯度的方向(0°/45°/90°/135°)
取局部极大值
阈值计算
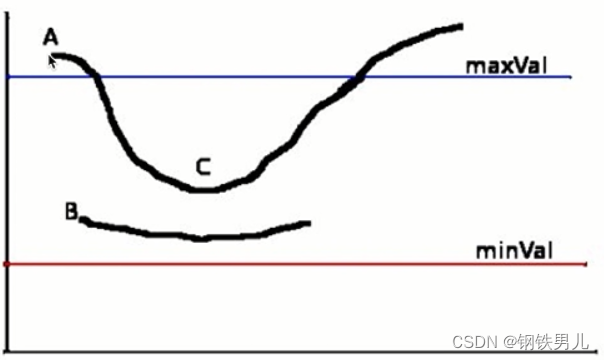
Canny API
Canny(img,minVal,maxVal,..)
import cv2
import numpy as np
img=cv2.imread('./2037551.jpg')
dst=cv2.Canny(img,100,200)
cv2.imshow('img',img)
cv2.imshow('dst',dst)
cv2.waitKey(0)
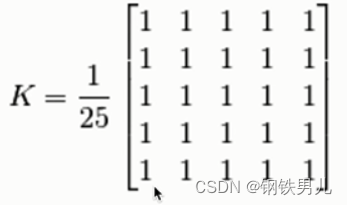
四 方盒滤波与均值滤波
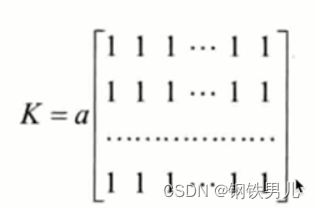
normalize=true,a=1/WxH
normalize=fasle,a=1
当normalize==true时
方盒滤波==平均滤波
两个滤波器API
boxFilter(src,ddepth,ksize,anchor,normalize,borderType)
blur(src,ksize,anchor,borderType)
import cv2
import numpy as np
img=cv2.imread('./2037551.jpg')
dst=cv2.blur(img,(5,5))
cv2.imshow('blur',dst)
cv2.waitKey(0)
五 高斯滤波

原理
高期权重
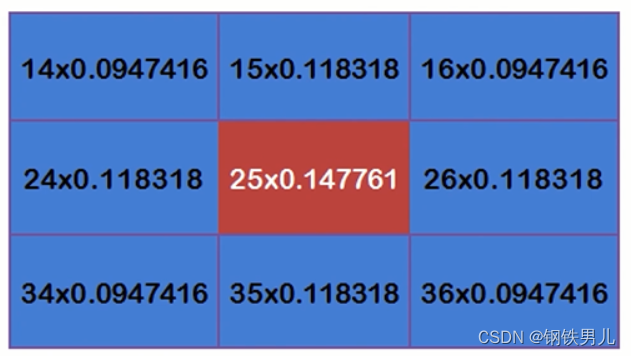
GaussianBlur(img,kernel,sigmaX,sigmaY,...)
import cv2
import numpy as np
img=cv2.imread('./2037551.jpg')
dst=cv2.GaussianBlur(img,(5,5),2)
cv2.imshow('img',img)
cv2.imshow('dst',dst)
cv2.waitKey(0)
六 中值滤波
假设有一个数组[1556789],取其中的中间值作为卷积后的结果值。
优点:
中值滤波的优点是对胡椒噪音效果明显。
胡椒噪音图

中值滤波API
medianBlur(img,ksize)
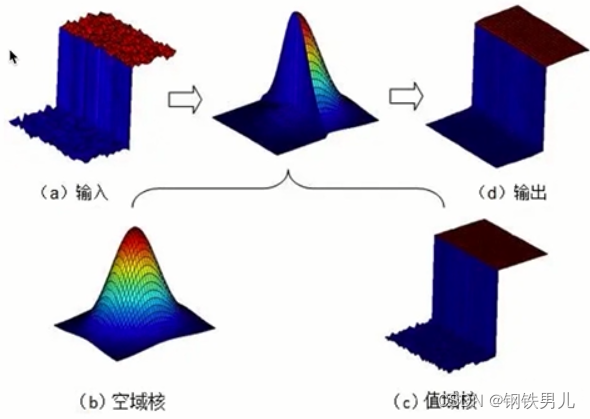
七 双边滤波
双倍滤波的优点
可以保留边缘,同时可以对边缘内的区域进行平滑处理。
双边滤波的作用是进行美颜。
双边滤波的原理
双边滤波API
bilateraFilter(img,d,sigmaColor,sigmaSpace,...)
import cv2
import numpy as np
img=cv2.imread('./2037551.jpg')
#双边滤波
dst=cv2.bilateralFilter(img,9,75,75)
cv2.imshow('img',img)
cv2.imshow('dst',dst)
cv2.waitKey(0)
八 高通滤波
1 常见的高通滤波
Sobel(索贝尔)(高斯)
Scharr(沙尔)
Sobel算子
先向x方向求导
然后在y方向求导
最终结果:|G|=|Gx|+|Gy|
Sobel API
Sobel(src,ddepth,dx,dy,ksize=3,scale=1,delta=0,borderType=BORDER_DEFAULT)
import cv2
import numpy as np
img=cv2.imread('./2037551.jpg')
#索贝尔算子Y方向边缘
dst1=cv2.Sobel(img,cv2.CV_64F,1,0,ksize=5)
dst2=cv2.Sobel(img,cv2.CV_64F,0,1,ksize=5)
cv2.imshow('img',img)
cv2.imshow('dst',dst1)
cv2.imshow('dst2',dst2)
cv2.waitKey(0)
2 沙尔算子
与Sobel类似,只不过使用的kernel值不同。
Scharr只能求x方向或y方向的边缘。
Scharr(src,ddepth,dx,dy,
scale=1,delta=0,borderType=BORDER_DEFAULT)
import cv2
import numpy as np
img=cv2.imread('./2037551.jpg')
dst1=cv2.Scharr(img,cv2.CV_64F,1,0)
dst2=cv2.Scharr(img,cv2.CV_64F,0,1)
cv2.imshow('img',img)
cv2.imshow('dst',dst1)
cv2.imshow('dst2',dst2)
cv2.waitKey(0)















 771
771

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









