







Automotive Radar Dataset for Deep Learning Based 3D Object Detection ——astyx数据集
3D Object Detection
——astyx数据集)
Introduction
该数据集包含雷达、激光雷达和相机信息以及带注释的三维地面真实物体。
据我们所知,唯一包含汽车雷达数据的公共数据集是最近引入的nuScenes数据集。
然而,该数据集包含具有稀疏填充的2D雷达信息的不同的、未公开类型的雷达传感器的雷达数据(与Astyx 6455 HiRes的约1000个3D点相比,约100个2D点)。
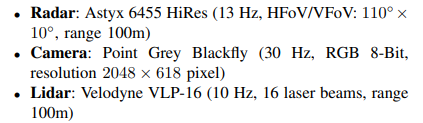
Sensor System Setup
Ground Truth Genereation
lidar:定位和校准全三维方向主要使用激光雷达传感器,因为它是获取详细和精确三维特性的最佳传感器
camera:使用相机信息对对象属性进行微调。尤其是类信息和物体的高度通常无法通过激光雷达传感器确定;
radar:由于激光雷达的范围有限(主要是由于不同激光束之间的角度开口),任何激光雷达测量通常都不会覆盖遥远的物体。不过,我们对这些不可被覆盖的物体进行了注释,因为它们通常在雷达和相机中都是可见的(见图2)。然而,位置和尺寸的确定性不如附近物体的精确,因此我们也存储了位置和尺寸的不确定性的物体属性。此外,我们还注释了“不可见”对象。这意味着没有任何激光雷达或摄像机测量,但在雷达数据中清晰可见(例如,通过在其他车辆下方传播的多路径反射)并且可以通过时间参考关联的物理对象-在数据记录之前或之后变得可见。
Result
我们在这一阶段提供的免费使用的结果数据集包括500个同步帧(雷达、激光雷达、照相机),其中包含大约3000个非常精确标记为3D目标的注释。虽然大多数物体属于“汽车”类,但我们也提供了总共7类(公共汽车、汽车、自行车、摩托车手、人、拖车、卡车)的少量地面真实数据。
ground truth data annotation为每个对象包含以下属性:
3D position (x,y,z)
• 3D rotation (rx,ry,rz)
• 3D dimension (w,l,h)
• Class information
• Occlusion indicator
• Uncertainty (position, dimension)














 6081
6081











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









