






Intro
在深度学习,使用多个任务(loss)训练模型时,通常使用最小化加权线性和的方式来训练整个模型。但是这要求多任务之间不存在相互竞争。因此作者提出新的多任务学习方法,将多任务学习转化成多目标优化问题,借助凸优化问题求帕累托(pareto)最优解。
method
问题定义
对一个输入空间X和任务集合空间
{
Y
t
}
t
∈
[
T
]
\left\{\mathcal{Y}^t\right\}_{t \in[T]}
{Yt}t∈[T]上的多任务问题(MSL)进行研究,在数据集中数据点可以表示为
{
x
i
,
y
i
1
,
…
,
y
i
T
}
i
∈
[
N
]
\left\{\mathbf{x}_i, y_i^1, \ldots, y_i^T\right\}_{i \in[N]}
{xi,yi1,…,yiT}i∈[N],其中T表示任务数量,N表示数据点个数。每一个任务的表示为
f
t
(
x
;
θ
s
h
,
θ
t
)
:
X
→
Y
t
f^t\left(\mathbf{x} ; \boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^t\right): \mathcal{X} \rightarrow \mathcal{Y}^t
ft(x;θsh,θt):X→Yt。损失函数表示为
L
t
(
⋅
,
⋅
)
:
Y
t
×
Y
t
→
R
+
\mathcal{L}^t(\cdot, \cdot): \mathcal{Y}^t \times \mathcal{Y}^t \rightarrow \mathbb{R}^{+}
Lt(⋅,⋅):Yt×Yt→R+。
多任务的总损失函数通常被表示为:
min
θ
s
h
,
θ
1
,
…
,
θ
T
∑
t
=
1
T
c
t
L
^
t
(
θ
s
h
,
θ
t
)
\min _{\substack{\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^1, \ldots, \boldsymbol{\theta}^T}} \sum_{t=1}^T c^t \hat{\mathcal{L}}^t\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^t\right)
θsh,θ1,…,θTmint=1∑TctL^t(θsh,θt)
对每个任务静态或者动态计算权重
c
t
c^t
ct,其中
L
^
t
(
θ
s
h
,
θ
t
)
\hat{\mathcal{L}}^t\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^t\right)
L^t(θsh,θt)表示任务t的经验损失(
L
^
t
(
θ
s
h
,
θ
t
)
≜
1
N
∑
i
L
(
f
t
(
x
i
;
θ
s
h
,
θ
t
)
,
y
i
t
)
\hat{\mathcal{L}}^t\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^t\right) \triangleq \frac{1}{N} \sum_i \mathcal{L}\left(f^t\left(\mathbf{x}_i ; \boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^t\right), y_i^t\right)
L^t(θsh,θt)≜N1∑iL(ft(xi;θsh,θt),yit))。
加权求和在直观上很吸引人,但是它通常需要在各种规模进行复杂的网格搜索,或者使用启发式算法。
另外,在MTL中不能定义全局最优性。假设两个解决方案
θ
\theta
θ和
θ
‾
\overline{\theta}
θ,它们使得
L
^
t
1
(
θ
s
h
,
θ
t
1
)
<
L
^
t
1
(
θ
‾
s
h
,
θ
‾
t
1
)
\hat{\mathcal{L}}^{t_1}\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^{t_1}\right)<\hat{\mathcal{L}}^{t_1}\left(\overline{\boldsymbol{\theta}}^{s h}, \overline{\boldsymbol{\theta}}^{t_1}\right)
L^t1(θsh,θt1)<L^t1(θsh,θt1)和
L
^
t
2
(
θ
s
h
,
θ
t
2
)
>
L
^
t
2
(
θ
‾
s
h
,
θ
‾
t
2
)
\hat{\mathcal{L}}^{t_2}\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^{t_2}\right)>\hat{\mathcal{L}}^{t_2}\left(\overline{\boldsymbol{\theta}}^{s h}, \overline{\boldsymbol{\theta}}^{t_2}\right)
L^t2(θsh,θt2)>L^t2(θsh,θt2)。也就是说对于任务
t
1
t_1
t1参数
θ
\theta
θ 更好,对于任务
t
2
t_2
t2参数
θ
‾
\overline{\theta}
θ 更好。如果没有关于两任务重要性的说明,是不能对比两种解决方案即两种参数的优劣。
MTL可以表述为多目标优化,优化一个可能相互冲突的目标集合,使用损失L表示:
min
θ
s
h
,
θ
1
,
…
,
θ
T
L
(
θ
s
h
,
θ
1
,
…
,
θ
T
)
=
min
θ
s
h
,
θ
1
,
…
,
θ
T
(
L
^
1
(
θ
s
h
,
θ
1
)
,
…
,
L
^
T
(
θ
s
h
,
θ
T
)
)
⊤
.
\min _{\substack{\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^1, \ldots, \boldsymbol{\theta}^T}} \mathbf{L}\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^1, \ldots, \boldsymbol{\theta}^T\right)=\min _{\substack{\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^1, \ldots, \boldsymbol{\theta}^T}}\left(\hat{\mathcal{L}}^1\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^1\right), \ldots, \hat{\mathcal{L}}^T\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^T\right)\right)^{\top} .
θsh,θ1,…,θTminL(θsh,θ1,…,θT)=θsh,θ1,…,θTmin(L^1(θsh,θ1),…,L^T(θsh,θT))⊤.
这个多目标优化目标其实也就是求pareto帕累托最优点。
只有当但所有任务t上
L
^
t
(
θ
s
h
,
θ
t
)
≤
L
^
t
(
θ
‾
s
h
,
θ
‾
t
)
\hat{\mathcal{L}}^t\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^t\right) \leq \hat{\mathcal{L}}^t\left(\overline{\boldsymbol{\theta}}^{s h}, \overline{\boldsymbol{\theta}}^t\right)
L^t(θsh,θt)≤L^t(θsh,θt)都成立并且
L
(
θ
s
h
,
θ
1
,
…
,
θ
T
)
≠
L
(
θ
‾
s
h
,
θ
‾
1
,
…
,
θ
‾
T
)
\mathbf{L}\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^1, \ldots, \boldsymbol{\theta}^T\right) \neq \mathbf{L}\left(\overline{\boldsymbol{\theta}}^{s h}, \overline{\boldsymbol{\theta}}^1, \ldots, \overline{\boldsymbol{\theta}}^T\right)
L(θsh,θ1,…,θT)=L(θsh,θ1,…,θT)时,
θ
\theta
θ优于
θ
‾
\overline{\theta}
θ。帕累托最优点也就是优于所有其他点的最优解
θ
⋆
\theta^{\star}
θ⋆。
MGDA(多重梯度下降算法)
作者首先将帕累托静止点定义为满足以下条件的点
(1)存在
α
1
,
…
,
α
T
≥
0
\alpha^1, \ldots, \alpha^T \geq 0
α1,…,αT≥0,使得
∑
t
=
1
T
α
t
=
1
\sum_{t=1}^T \alpha^t=1
∑t=1Tαt=1 并且
∑
t
=
1
T
α
t
∇
θ
s
h
L
^
t
(
θ
s
h
,
θ
t
)
=
0
\sum_{t=1}^T \alpha^t \nabla_{\boldsymbol{\theta}^{s h}} \hat{\mathcal{L}}^t\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^t\right)=0
∑t=1Tαt∇θshL^t(θsh,θt)=0
(2)对所有任务,
∇
θ
t
L
^
t
(
θ
s
h
,
θ
t
)
=
0
\nabla_{\boldsymbol{\theta}^t} \hat{\mathcal{L}}^t\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^t\right)=0
∇θtL^t(θsh,θt)=0。
最优点必定是静止点。因此可以使用如下优化问题来确定a:
min
α
1
,
…
,
α
T
{
∥
∑
t
=
1
T
α
t
∇
θ
s
h
L
^
t
(
θ
s
h
,
θ
t
)
∥
2
2
∣
∑
t
=
1
T
α
t
=
1
,
α
t
≥
0
∀
t
}
\min _{\alpha^1, \ldots, \alpha^T}\left\{\left\|\sum_{t=1}^T \alpha^t \nabla_{\boldsymbol{\theta}^{s h}} \hat{\mathcal{L}}^t\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^t\right)\right\|_2^2 \mid \sum_{t=1}^T \alpha^t=1, \alpha^t \geq 0 \quad \forall t\right\}
α1,…,αTmin⎩
⎨
⎧
t=1∑Tαt∇θshL^t(θsh,θt)
22∣t=1∑Tαt=1,αt≥0∀t⎭
⎬
⎫
该优化问题的解各项
∇
θ
t
L
^
t
(
θ
s
h
,
θ
t
)
=
0
\nabla_{\boldsymbol{\theta}^t} \hat{\mathcal{L}}^t\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^t\right)=0
∇θtL^t(θsh,θt)=0且结果满足KKT条件,要么该解给出一个改进所有任务的下降方向。同时通过最小化这个
α
t
∇
θ
s
h
L
^
t
(
θ
s
h
,
θ
t
)
\alpha^t \nabla_{\boldsymbol{\theta}^{s h}} \hat{\mathcal{L}}^t\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^t\right)
αt∇θshL^t(θsh,θt)的范数,实现如果梯度的范数较大,损失函数下降较快时,对这个损失函数乘以一个小的权重;如果梯度的范数较小,损失函数下降较慢,就乘以一个大的权重。实现让每个损失函数同步进行优化。
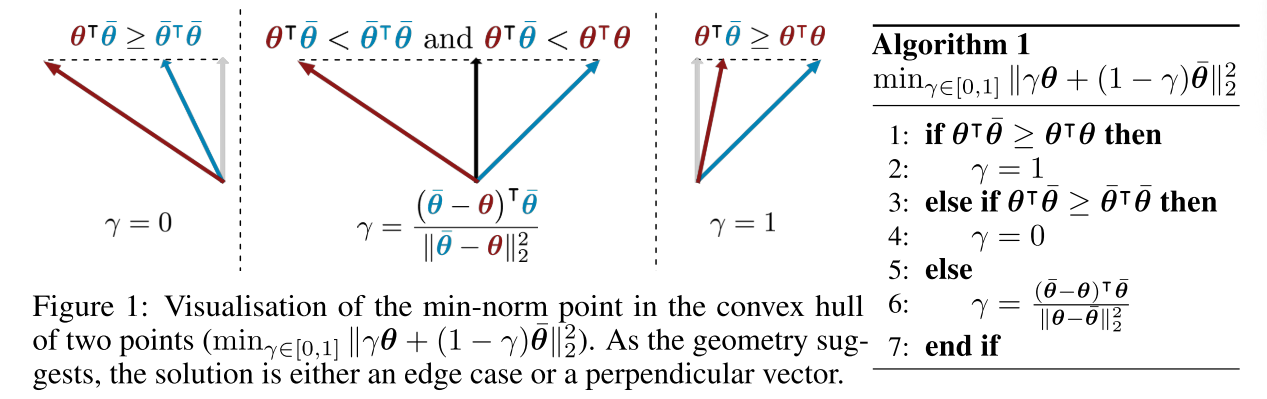
优化问题的解
以两个优化为例,优化问题可以被定义为
min
α
∈
[
0
,
1
]
∥
α
∇
θ
s
h
L
^
1
(
θ
s
h
,
θ
1
)
+
(
1
−
α
)
∇
θ
s
h
L
^
2
(
θ
s
h
,
θ
2
)
∥
2
2
\min _{\alpha \in[0,1]}\left\|\alpha \nabla_{\boldsymbol{\theta}^{s h}} \hat{\mathcal{L}}^1\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^1\right)+(1-\alpha) \nabla_{\boldsymbol{\theta}^{s h}} \hat{\mathcal{L}}^2\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^2\right)\right\|_2^2
minα∈[0,1]
α∇θshL^1(θsh,θ1)+(1−α)∇θshL^2(θsh,θ2)
22,它的解析解是:
α
^
=
[
(
∇
θ
s
h
L
^
2
(
θ
s
h
,
θ
2
)
−
∇
θ
s
h
L
^
1
(
θ
s
h
,
θ
1
)
)
⊤
∇
θ
s
h
L
^
2
(
θ
s
h
,
θ
2
)
∥
∇
θ
s
h
L
^
1
(
θ
s
h
,
θ
1
)
−
∇
θ
s
h
L
^
2
(
θ
s
h
,
θ
2
)
∥
2
2
]
+
,
1
T
\hat{\alpha}=\left[\frac{\left(\nabla_{\boldsymbol{\theta}^{s h}} \hat{\mathcal{L}}^2\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^2\right)-\nabla_{\boldsymbol{\theta}^{s h}} \hat{\mathcal{L}}^1\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^1\right)\right)^{\top} \nabla_{\boldsymbol{\theta}^{s h}} \hat{\mathcal{L}}^2\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^2\right)}{\left\|\nabla_{\boldsymbol{\theta}^{s h}} \hat{\mathcal{L}}^1\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^1\right)-\nabla_{\boldsymbol{\theta}^{s h}} \hat{\mathcal{L}}^2\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^2\right)\right\|_2^2}\right]_{+, \underset{T}{1}}
α^=
∇θshL^1(θsh,θ1)−∇θshL^2(θsh,θ2)
22(∇θshL^2(θsh,θ2)−∇θshL^1(θsh,θ1))⊤∇θshL^2(θsh,θ2)
+,T1
其中
[
⋅
]
+
,
1
T
[\cdot]_{+, \frac{1}{T}}
[⋅]+,T1表示截取到[0,1]。结果可视化如下
在MIL中运用解析解如下:
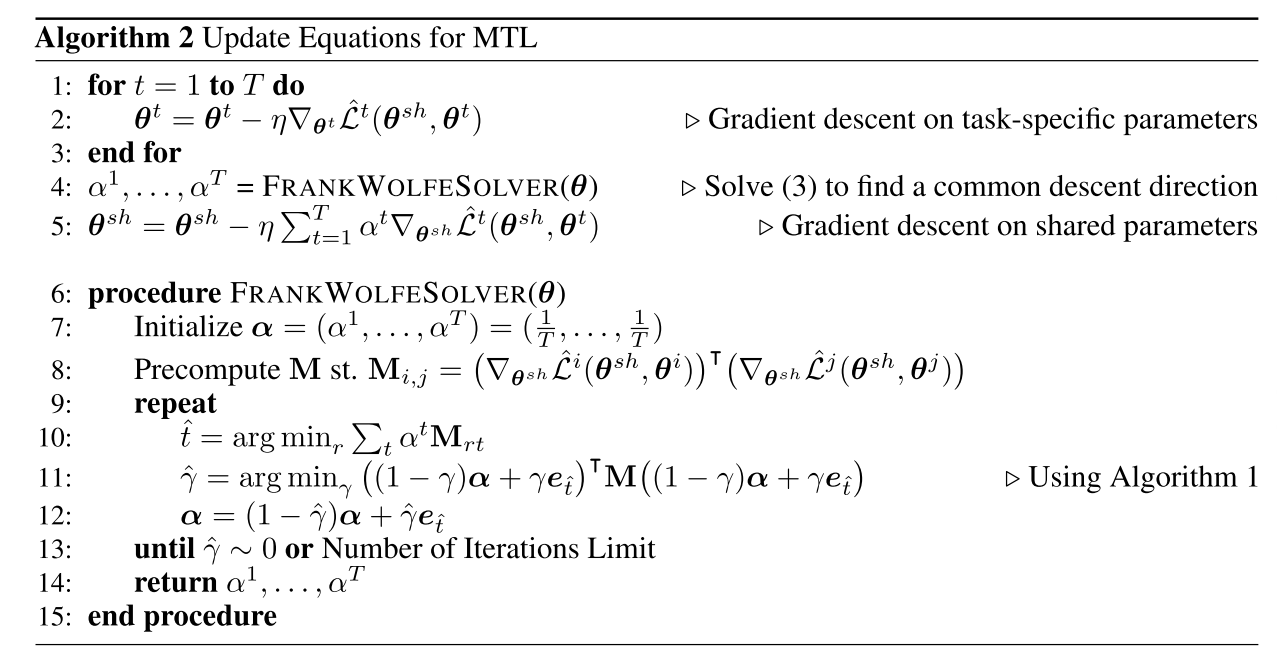
编解码器架构中的高效优化
上述方法需要计算
∇
θ
s
h
L
^
t
(
θ
s
h
,
θ
t
)
\nabla_{\boldsymbol{\theta}^{s h}} \hat{\mathcal{L}}^t\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^t\right)
∇θshL^t(θsh,θt),需要对每个任务的共享参数进行反向传播。因此得到的梯度计算是向前的,然后再T次反向传播,考虑向后传播开销大,这导致了训练时间的线性增加。
作者提出优化目标的上届,这样只需要一次反向传播。作者也进一步证明了在现实假设下,优化这个上界可以得到一个帕累托最优解。
将表示函数和特定于任务的决策函数结合再一起表示为:
f
t
(
x
;
θ
s
h
,
θ
t
)
=
(
f
t
(
⋅
;
θ
t
)
∘
g
(
⋅
;
θ
s
h
)
)
(
x
)
=
f
t
(
g
(
x
;
θ
s
h
)
;
θ
t
)
f^t\left(\mathbf{x} ; \boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^t\right)=\left(f^t\left(\cdot ; \boldsymbol{\theta}^t\right) \circ g\left(\cdot ; \boldsymbol{\theta}^{s h}\right)\right)(\mathbf{x})=f^t\left(g\left(\mathbf{x} ; \boldsymbol{\theta}^{s h}\right) ; \boldsymbol{\theta}^t\right)
ft(x;θsh,θt)=(ft(⋅;θt)∘g(⋅;θsh))(x)=ft(g(x;θsh);θt)
其中g是所有任务共享的表示函数,
f
t
f^t
ft输入表示并用于特定任务的函数。如果表征结果
Z
=
(
z
1
,
…
,
z
N
)
\mathbf{Z}=\left(\mathbf{z}_1, \ldots, \mathbf{z}_N\right)
Z=(z1,…,zN),其中
z
i
=
g
(
x
i
;
θ
s
h
)
\mathbf{z}_i=g\left(\mathbf{x}_i ; \boldsymbol{\theta}^{s h}\right)
zi=g(xi;θsh),由链式求导法则,再根据柯西不等式,可以得到这个上界:
∥
∑
t
=
1
T
α
t
∇
θ
s
h
L
^
t
(
θ
s
h
,
θ
t
)
∥
2
2
≤
∥
∂
Z
∂
θ
s
h
∥
2
2
∥
∑
t
=
1
T
α
t
∇
Z
L
^
t
(
θ
s
h
,
θ
t
)
∥
2
2
\left\|\sum_{t=1}^T \alpha^t \nabla_{\boldsymbol{\theta}^{s h}} \hat{\mathcal{L}}^t\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^t\right)\right\|_2^2 \leq\left\|\frac{\partial \mathbf{Z}}{\partial \boldsymbol{\theta}^{s h}}\right\|_2^2\left\|\sum_{t=1}^T \alpha^t \nabla_{\mathbf{Z}} \hat{\mathcal{L}}^t\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^t\right)\right\|_2^2
t=1∑Tαt∇θshL^t(θsh,θt)
22≤
∂θsh∂Z
22
t=1∑Tαt∇ZL^t(θsh,θt)
22
如此优化问题可以被转化为:
min
α
1
,
…
,
α
T
{
∥
∑
t
=
1
T
α
t
∇
Z
L
^
t
(
θ
s
h
,
θ
t
)
∥
2
2
∣
∑
t
=
1
T
α
t
=
1
,
α
t
≥
0
∀
t
}
\min _{\alpha^1, \ldots, \alpha^T}\left\{\left\|\sum_{t=1}^T \alpha^t \nabla_{\mathbf{Z}} \hat{\mathcal{L}}^t\left(\boldsymbol{\theta}^{s h}, \boldsymbol{\theta}^t\right)\right\|_2^2 \mid \sum_{t=1}^T \alpha^t=1, \alpha^t \geq 0 \quad \forall t\right\}
α1,…,αTmin⎩
⎨
⎧
t=1∑Tαt∇ZL^t(θsh,θt)
22∣t=1∑Tαt=1,αt≥0∀t⎭
⎬
⎫
虽然MGDA-UB是原始优化问题的近似,但作者证明一个定理,表明MGDA-UB在一定假设下产生帕累托最优解。

实验
baseline
(1)uniform scaling:最小化损失函数的统一权重的加权和
(2)single task:独立的处理每个任务
(3)grid search:网格搜索所有的可能权重
(3)Kendall:使用不确定度加权
(4)gradNorm:使用正规化
MultiMNIST
对每个图像都随机选另一个不同的图像,两张图片分别放置左上角和右下角。由此得到两个任务对左上角图片进行分类的任务L和对右下角图片分类的任务R。

多标签分类
模型需要根据给定的一组attributes确定每个attributes是否适用于输入图像。也就是每一个attributes就一个二分类任务。


场景理解
给定一个RGB图像,解决三个任务:语义分割,实例分割,monocular深度估计。

论文代码(https://github.com/isl-org/MultiObjectiveOptimization)。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











