







 本文介绍了循环神经网络(RNN)的基本概念、特点和应用场景,包括其在自然语言处理、时间序列预测中的应用。RNN因其记忆性、参数共享和图灵完备性在序列数据处理中有优势。文章详细探讨了展开计算图的概念,展示了RNN如何通过参数共享处理不同长度的序列,并对比了RNN与其他神经网络的区别。此外,还讨论了经典RNN结构、导师驱动过程的循环网络以及单向量输出的RNN,强调了输入序列方式对RNN性能的影响。
本文介绍了循环神经网络(RNN)的基本概念、特点和应用场景,包括其在自然语言处理、时间序列预测中的应用。RNN因其记忆性、参数共享和图灵完备性在序列数据处理中有优势。文章详细探讨了展开计算图的概念,展示了RNN如何通过参数共享处理不同长度的序列,并对比了RNN与其他神经网络的区别。此外,还讨论了经典RNN结构、导师驱动过程的循环网络以及单向量输出的RNN,强调了输入序列方式对RNN性能的影响。
第十章 序列建模:循环和递归网络
循环神经网络(recurrent neural network)或RNN是一类用于处理序列数据的神经网络。
循环神经网络(Recurrent Neural Network, RNN)是一类以序列(sequence)数据为输入,在序列的演进方向进行递归(recursion)且所有节点(循环单元)按链式连接的递归神经网络(recursive neural network) 。
循环神经网络具有记忆性、参数共享并且图灵完备(Turing completeness),因此在对序列的非线性特征进行学习时具有一定优势 。循环神经网络在自然语言处理(Natural Language Processing, NLP),例如语音识别、语言建模、机器翻译等领域有应用,也被用于各类时间序列预报。引入了卷积神经网络(Convoutional Neural Network,CNN)构筑的循环神经网络可以处理包含序列输入的计算机视觉问题。
卷积网络在二维图像拓扑上是最成功的
- 专门用于处理网格化数据X(如一个图像)的神经网络
- 可以很容易地扩展到具有很大宽度和高度的图像,以及处理大小可变的图像
循环神经网络主要用于处理一维序列数据。
- 循环神经网络是专门用于处理序列x(1),…,x(τ)的神经网络
- 可以扩展到更长的序列(比不基于序列的特化网络长得多)
- 大多数循环网络也能处理可变长度的序列
循环神经网络和神经网络区别
两者最大的不同就是循环神经网络可以根据过去做到未来。
我们可以根据不同的训练准则,选择性的精确保留过去序列的某些方面。
下图为神经网络与循环神经网络的对比。
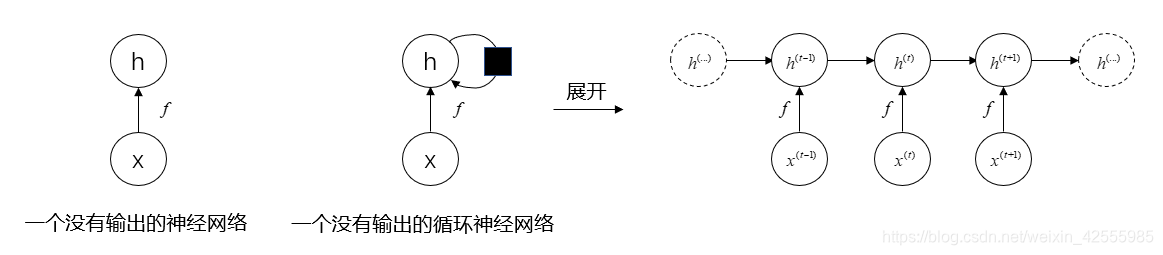 在图中可以看到一个普通的神经网络就是将输入x通过函数f的计算再到状态h。而循环神经网络顾名思义就是一个循环过程,这个循环网络只处理来自输入X的信息,将其合并到经过时间向前传播的状态h,f是数据的处理函数。可以发现当前状态是可以影响其未来的状态。
在图中可以看到一个普通的神经网络就是将输入x通过函数f的计算再到状态h。而循环神经网络顾名思义就是一个循环过程,这个循环网络只处理来自输入X的信息,将其合并到经过时间向前传播的状态h,f是数据的处理函数。可以发现当前状态是可以影响其未来的状态。
展开计算图
计算图是形式化一组计算结构的方式,如那些涉及将输入和参数映射到输出和损失计算。
以下在反向传播中曾经介绍过
【1.计算图定义】
我们使用图中的每一个节点来表示一个变量。变量可以是标量、向量、矩阵、张量、或者甚至是另一类型的变量。
为了形式化我们的图形,我们还需引入操作(operation)这一概念。操作是指一个或多个变量的简单函数。
我们的图形语言伴随着一组被允许的操作。我们可以通过将多个操作复合在一起来描述更为复杂的函数。
如果变量 y 是变量 x 通过一个操作计算得到的,那么我们画一条从 x 到 y 的有向边。我们有时用操作的名称来注释输出的节点,当上下文很明确时,有时也会省略这个标注。
【2.不同操作对应的计算图举例】
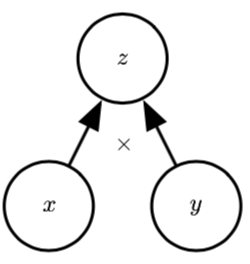
- 使用 × 操作计算 z = xy 的图
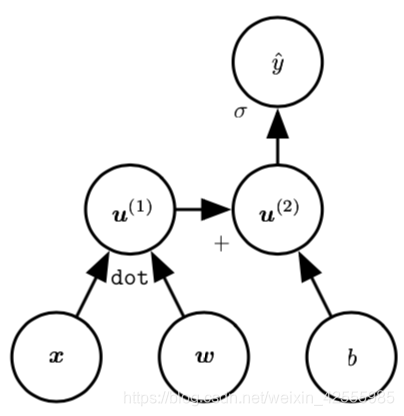
- 用于逻辑回归预测 yˆ = σ(x⊤w + b) 的图。一些中间表达式在代数表达式中没有名称,但在图形中却需要。我们简单地将 第 i 个这样的变量命名为 u(i)
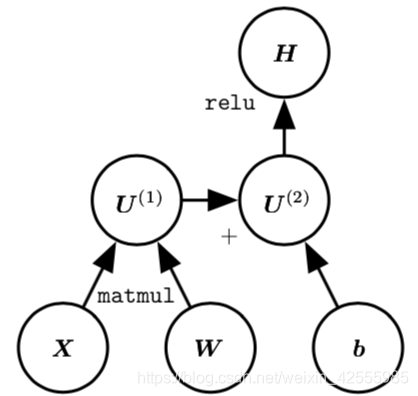
- 表达式H = max{0, XW + b} 的计算图,在给定包含小批量输入数据的设计矩阵 X 时,它计算整流线性单元Relu( g(z)=max{0,z} )激活的设计矩阵 H。
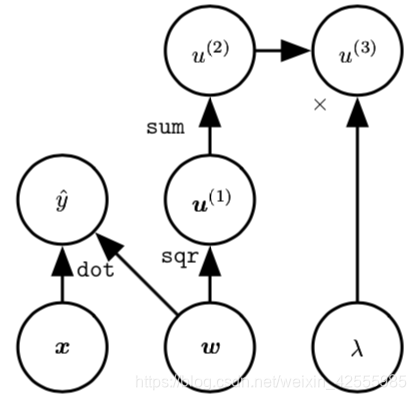
- 对变量实施多个操作也是可能的。该计算图对线性回归模型的权重 w 实施多个操作。这个权重不仅用于预测 yˆ,也用于权重衰减罚项 λ ∑ i w i 2 \lambda \sum_i w_i^2 λ∑iwi2。这就是所谓的
结构化风险评估。
【3.展开RNN计算图】
我们对展开(unfolding) 递归或循环计算得到的重复结构进行解释,这些重复结构通常对应于一个事件链。展开(unfolding) 这个图导致深度网络结构中的参数共享。
a . 动 态 系 统 的 经 典 形 式 计 算 图 \red {a. 动态系统的经典形式计算图} a.动态系统的经典形式计算图
例如,考虑动态系统的经典形式:
s ( t ) = f ( s ( t − 1 ) ; θ ) s^{(t)}=f(s^{(t−1)};θ) s(t)=f(s(t−1);θ)
其中 s ( t ) s^{(t)} s(t)称为系统的状态。
s s s在时刻 t t t的定义需要参考时刻 t − 1 t-1 t−1时同样的定义,因此上式是循环的。
对有限时间步 τ \tau τ, τ − 1 \tau-1 τ−1次应用这个定义可以展开这个图。
例如 τ = 3 \tau = 3 τ=3,我们对上式展开,可以得到:
s ( 3 ) = f ( s ( 2 ) ; θ ) = f ( f ( s ( 1 ) ; θ ) ; θ ) s^{(3)}=f(s^{(2)};θ)=f(f(s^{(1)};θ);θ) s(3)=f(s(2);θ)=f(f(s(1);θ);θ)
以这种方式重复应用定义,展开等式,就能得到不涉及循环的表达。
现在可以使用传统的有向无环计算图(和隐马尔可夫模型HMM一样都是有向无环图概率图模型)表示这样的表达。

每个节点表示在某个时刻 t 的状态,并且函数 f 将 t 处的状态映射到 t + 1 处的状态。所有时间步都使用相同的参数(用于参数化 f 的相同 θ 值)
b . 存 在 外 部 驱 动 信 号 的 动 态 系 统 的 计 算 图 \red {b.存在外部驱动信号的动态系统的计算图} b.存在外部驱动信号的动态系统的计算图
另一个例子,让我们考虑由外部信号 x ( t ) x^{(t)} x(t)驱动的动态系统,
s ( t ) = f ( s ( t − 1 ) , x ( t ) ; θ ) s^{(t)}=f(s^{(t−1)},x^{(t)};θ) s(t)=f(s(t−1),x(t);θ)
为了表明状态是网络的隐藏单元,我们使用变量 h h
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1261
1261

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









