







1、Robust binocular pose estimation based on pigeon-inspired optimization
基于鸽子启发式优化的稳健双目姿势估计-2015
https://ieeexplore.ieee.org/document/7334261
本文提出了一种基于鸽子启发优化(PIO)的双目相机系统的准确而鲁棒的姿态估计算法,可以很容易地推广到多相机系统的估计中。在这种方法中,两个摄像机的信息被完全利用,并且它们的姿势可以同时准确地确定。鸽子启发式优化是一种新的高效进化算法,该算法用于选择我们方法中的最佳旋转轴。通过对某些最新姿态估计方法进行的三个实验案例,证明了该方法的鲁棒性和高精度。
2、Stable Pose Estimation with a Motion Model in Real-Time Application
https://ieeexplore.ieee.org/document/6298416
实时应用中带有运动模型的稳定姿态估计-2012
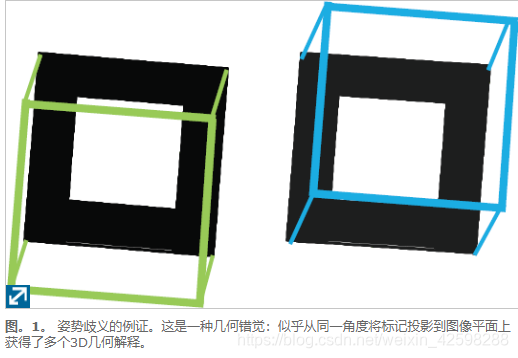
从相机估计物体姿势是计算机视觉中一个发展良好的话题。从理论上讲,可以唯一确定校准相机的姿势。但是实际上,由于目标对象的准确性较低,大多数实时姿态估计算法都存在姿态歧义的问题。由于几何错觉现象,我们认为姿势模糊性×相应误差函数的两个不同的局部极小值×存在。这两个模棱两可的姿势都是合理的。在获得两个最小值(候选姿势)的解后,我们开发了一种实时算法,用于使用运动模型对目标对象进行稳定的姿势估计。在实验结果中,该算法有效地降低了姿态跳跃和姿态抖动的重要性。据我们所知,
本文主要贡献:
-
通过考虑运动模型中两个模棱两可的姿势中的正确姿势,可以有效地解决姿势跳跃的问题。
-
由于使用了卡尔曼滤波器,姿势抖动的重要性将降低。我们可以估算出比实际姿势更接近真实姿势的姿势。估计姿势的顺序也将更加平滑,因为姿势与之前的姿势更加一致。
-
这是结合运动模型进行姿态估计的第一项工作。即使在长序列的某些帧中未正确检测到目标对象,我们也可以将运动模型的预测姿势用作最终姿势,以防止中断姿势序列
2.2 在实时应用中使用分析运动模型从平面目标进行稳定的姿态跟踪-2014
https://ieeexplore.ieee.org/document/6958793
从摄像机跟踪对象姿态是计算机视觉中一种完善的方法。从理论上讲,可以从经过校准的相机唯一确定姿势。但是,实际上,大多数实时姿态估计算法都会遇到姿态歧义的问题。我们认为,姿势歧义性(即根据误差函数检测到两个不同的局部最小值)是由几何错觉引起的。在这种情况下,两个模棱两可的姿势都是合理的,但是我们不能选择误差最小的姿势作为最终姿势。因此,我们开发了一种实时算法,可以使用解析运动模型对平面目标对象进行正确的姿态估计。我们的实验结果表明,提出的算法有效地减少了姿势跳跃和姿势抖动的影响。据我们所知,
3、Applying Fast Planar Object Detection in Multimedia Augmentation for Products with Mobile Devices
快速平面目标检测在移动设备产品的多媒体增强中的应用-2012
https://ieeexplore.ieee.org/document/6305780
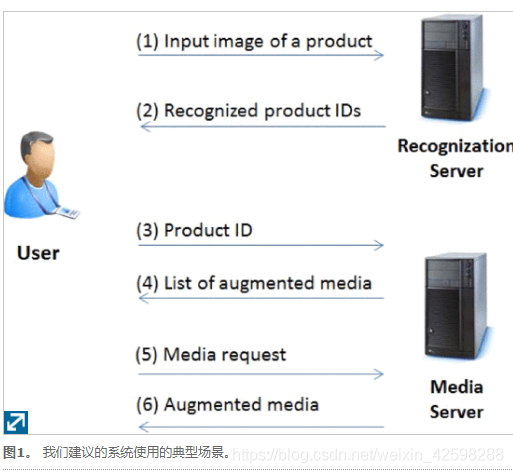
有关产品的文本,图像,音频和视频剪辑是客户购物的重要信息。但是,客户在实体店看到产品后就无法获得此类信息。作者提出了一种使用移动设备的产品多媒体增强中的快速平面对象检测系统,该系统可以为顾客购物提供有用的信息。实验结果表明我们提出的系统在实时处理和显示用户移动设备上的多媒体信息方面的优势。该系统可以用作客户的智能助手,以获取有关产品的更多有用信息,并帮助他们确定自己需求的最佳选择
在第二部分中,我们简要介绍了AR应用程序和可视搜索。第三部分介绍了基于产品视觉查询的产品识别系统和过程。实验结果列于第四节。最后,第五节提出了有关未来工作的结论和想法。
4、Improving the accuracy of visual markers by four dots and image interpolation
通过四个点和图像插值来提高视觉标记的准确性-2016
https://ieeexplore.ieee.org/document/8066087
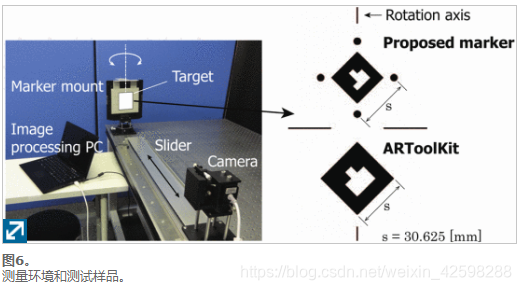
视觉标记是有用的工具,可支持自主机器人进行物体识别和姿势测量;然而,就姿势估计而言,常规标记的准确性较低。我们通过更改标记的设计和相应的图像处理算法提高了这种估算精度。更具体地说,我们使用了四个点,这些点比使用给定标记的四个角更稳定地被检测到。此外,我们使用图像插值技术以亚像素精度检测这些点的位置。结果,姿势估计误差降低到传统标记器误差的大约10%。此外,我们观察到距离和照度变化方面的鲁棒性也得到了增强。
使用常规标记进行姿势估计面临以下三个问题:(1)正面方向的姿势估计不正确;(2)姿势含糊;(3)深度方向上的位置模拟不正确。

我们使用的图像插值方法是一种通过使用相邻像素的值对尺寸调整后的图像区域进行插值的技术(双三次插值与Lanczos插值),我们使用以下步骤提取特征点。
- 使用现有软件检测二维码。
- 提取包含二维码和参考点的矩形区域。
- 使用图像插值技术将矩形区域调整为特定大小(即放大)。
- 在此确定放大系数,使得标记的较长对角线的长度变为预定尺寸,称为调整大小的对角线长度。
- 对图像进行二值化处理,然后提取其轮廓。 检测二维码周围的点(即椭圆)。
- 获取每个点的边界矩形,以每个边界矩形的中心为每个点的中心。
-通过使用步骤(3)和(2)的逆变换,获得原始图像中每个点的中心。 使用获得的四个参考点,通过常规方法估计标记的姿势
在这项工作中,我们提出了一种提高姿态估计精度和视觉标记鲁棒性的实用方法。我们添加了四个点,这些点比标记的四个角更稳定地可检测,然后使用图像插值技术以亚像素精度检测这些点的位置。我们的方法为姿势估计中常规视觉标记的现有问题提供了解决方案。此外,我们还增强了该技术对距离和照明变化的鲁棒性。我们提出的标记器仍然很小,并且该方法可以轻松地合并到常规标记器系统中。我们注意到计算时间仅增加了一点点。总的来说,我们得出结论,我们提出的视觉标记器将对许多机器人控制系统有益。
5、A Method for Predicting Marker Tracking Error
标记追踪误差的预测方法-2007
https://ieeexplore.ieee.org/document/4538841/references#full-text-header
许多增强现实(AR)应用程序都使用基于标记的视觉跟踪系统,通过检测一个或多个平面界标来恢复相机的姿态。但是,这些系统中的大多数系统无法交互地量化其计算出的姿势的准确性。取而代之的是,这些系统的精度要么被忽略,被假定为固定值,要么使用误差表(在离线地面处理过程中构造)以及运行时插值方案来确定。这些方法的有效性值得怀疑,因为误差在很大程度上取决于摄像机的内在和外在参数以及场景的几何形状。在本文中,我们提出了一种实时预测标记跟踪器错误统计信息的算法。基于缩放后的球面单纯形无味变换(SSSUT),该算法将应用于增强现实工具包(ARToolKitPlus)。使用精密离线摄影测量技术验证了结果。
姿势计算错误可能源于多种原因。这些包括检测视觉参数时的错误(传感器热噪声,像素化和量化),校准(错误的固有参数),以及姿势恢复算法本身的错误(许多算法使用优化方案,并且可能陷入局部最小值[14])
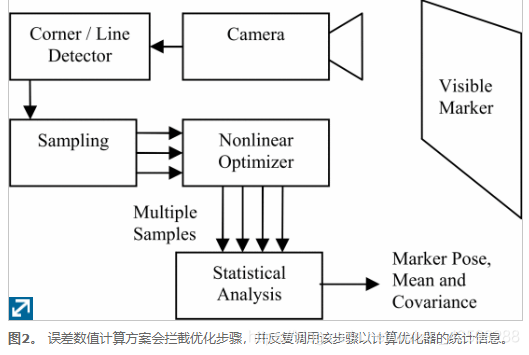
第2节将更详细地描述问题,包括错误的来源以及它们如何通过跟踪系统传播。然后,第3节描述了一种可能的解决方案,该解决方案使用SSSUT通过非线性估计算法传播已知错误。在第5节使用ARToolKitPlus标记跟踪器[8]提供一些结果之前,第4 节简要描述了实验设置。在第6节中得出结论。
6、A hybrid 3DoF pose estimation method based on camera and lidar data
基于相机和激光雷达数据的混合3DoF姿态估计方法-2017
https://ieeexplore.ieee.org/document/8324444
尽管已经在专门设计的仓库中部署了大量专用移动机械手,但是准确估计随机存放的货物和物品的位置和方向仍然是一个挑战。在本文中,我们提出了一种混合的3DoF姿态估计方法,该方法将摄像机和激光雷达数据融合在一起,以准确地估计目标立方体的姿态。我们首先开发了一种基于视觉和基于激光雷达的姿态估计方法。然后提出了一种基于视觉和激光雷达的混合方法,以提高姿态估计过程的准确性和鲁棒性。混合方法采用卡尔曼滤波器,将视觉方法和激光雷达方法的两个输出融合在一起。在实际实验中,我们的实时系统实现了约1cm的平均位置误差和<; 1°平均角度误差 1 。
我们的问题来自ICRA 2017 DJI RoboMaster移动操纵挑战赛,该挑战赛要求实时,强大且低成本的姿势估计算法
本文提出:
分别开发基于视觉和基于激光雷达的3自由度姿势估计方法。
通过融合RGB相机和2D激光雷达数据,提出了一种鲁棒的实时混合姿态估计方法。
设计基于摄像头激光雷达的低成本设备进行姿势估计
7、A 6-DOF ARTag-based tracking system
基于6 DOF ARTag的跟踪系统-2010
https://ieeexplore.ieee.org/document/5439146
本文提出了一种系统,该系统使用一组可变大小的基准标记来跟踪配备有相机的通用移动设备的位置和方向。该系统通过摄像机跟踪基准标记并得出设备的位置和方向,从而提供了六个自由度(6-DOF),从而使实现创新且价格合理的3D用户界面成为可能。该系统已通过使用投影仪和偏光镜集成到了洞穴自动虚拟环境(CAVE)中。
TinyMotion [2]是基于照相手机的接口方法的特定软件实现,该方法允许用户使用设备的水平,垂直,旋转和倾斜运动进行交互。TinyMotion软件基于类似于视频编码器通常使用的运动估计技术。该方法的主要局限性与漂移误差有关,因为TinyMotion是一种速率控制设备。此外,该系统不能完全抵抗照明变化。
8、使用旋转不变性的有效迭代姿势估计-2014
https://ieeexplore.ieee.org/document/6490037
本文使用迭代方案处理姿态估计。我们表明,使用足够的视觉信息,可以仅使用三个独立的未知数(即翻译参数)来迭代执行姿态估计。具体而言,旋转运动的不变性用于估计摄像机位置。另外,将适当的变换应用于所提出的不变量以减小图像空间和3-D空间中的变化之间的非线性。一旦估计了摄像机的位置,我们就表明可以使用两种不同的直接方法有效地估计旋转角度。将所提出的方法与文献中的其他两种方法进行了比较。结果表明,使用我们的方法,图像序列中的姿势跟踪和随机生成的姿势的收敛速度得到了改善。
9、平面目标的直接3D姿态估计
https://ieeexplore.ieee.org/document/7477640
从给定的2D图像估计已知对象的3D姿态是机器人技术和增强现实应用的众多研究中的重要问题。虽然最新的Perspective-n点算法在姿势估计中表现良好,但成功取决于能否提取特征点并将其正确匹配到具有丰富纹理的目标上。在这项工作中,我们提出了一种鲁棒的,用于3D姿态估计的直接方法,该方法具有很高的精度,在带纹理的和无纹理的平面目标上均表现良好。首先,通过将平面目标摆成模板匹配问题来近似估计平面目标相对于校准相机的姿态。接下来,通过梯度下降搜索方案进一步完善和消除对象姿态。
10、平面物体迭代姿态估计的完整初始解决方案-2018
https://ieeexplore.ieee.org/document/8340231
根据平面物体的图像进行相机姿态估计在摄影测量和计算机视觉中具有重要的应用。在本文中,提出了一种有效的方法来找到使用共面点的迭代相机姿态估计的初始解。从单应性开始,所提出的方法为绝对方向提供了最小二乘解,它具有相对较高的精度,并且可以通过使用高斯-牛顿方案或Lu的正交关系轻松地精化为一个最佳姿势,该姿势确定相应误差函数的局部最小值。迭代算法。针对平面对象的姿态估计中存在的歧义,我们提出了一种**寻找第二姿态的初始近似的新颖方法,**该方法与现有方法的简洁形式和清晰的几何解释不同。对合成数据进行的全面测试表明,与当前采用的迭代优化算法相结合,本文提出的两个初始解决方案可以实现与最佳的最新姿态估计算法相同的准确性和鲁棒性,而显着降低了计算成本。实际实验也被用来证明其性能
LHM是最流行的姿势估计迭代方法之一
当图像噪声级别不超过6个像素时,HI + LHM可达到100%的姿态估计正确性(随着图像噪声的增加,误差平滑增加,没有明显变化。
SP + LHM是用于从平面物体进行姿态估计的最可靠,最准确的迭代算法之一

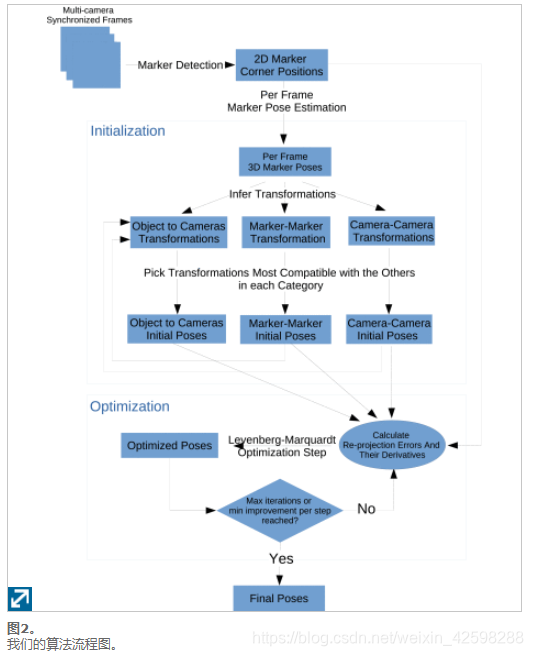
11、利用平方平面标记同时进行多视图相机姿态估计和对象跟踪-2019
https://ieeexplore.ieee.org/document/8631108
对象跟踪是许多应用程序中的关键方面,例如医学中的增强现实(例如,跟踪手术器械)或机器人技术。平方的平面标记已成为流行的跟踪工具,因为可以从四个角估计其姿态。虽然使用单个标记和单个摄像机会大大限制工作区域,但是使用附着在对象上的多个标记需要估计它们的相对位置,这对于高精度跟踪而言并非不重要。同样,使用多个摄像机需要估计其外部参数,这也是一个繁琐的过程,每当移动摄像机时都必须重复进行。本文提出了一种同时解决上述问题的新方法。从显示从多个摄像机记录的一组严格的平面标记的视频序列中,所提出的方法能够自动获得标记的三维配置,摄像机的外部参数以及每帧标记与摄像机之间的相对姿态。我们的实验表明,我们的方法可以使用低分辨率相机获得用于估计这些参数的高精度结果。一旦获得参数,就可以以低的计算成本实时地跟踪对象。所提出的方法是开发成本有效的对象跟踪解决方案的一步。我们的实验表明,我们的方法可以使用低分辨率相机获得用于估计这些参数的高精度结果。一旦获得参数,就可以以低的计算成本实时地跟踪对象。所提出的方法是开发成本有效的对象跟踪解决方案的一步。我们的实验表明,我们的方法可以使用低分辨率相机获得用于估计这些参数的高精度结果。一旦获得参数,就可以以低的计算成本实时地跟踪对象。所提出的方法是开发成本有效的对象跟踪解决方案的一步。
12、基于几何的港口起重机械精确稳定的姿态估计方法
https://ieeexplore.ieee.org/document/8673754
摄影测量作为一种视觉测量方法,已广泛应用于工程测量领域。摄影测量必须首先完成相机姿态估计。但是,由于端口条件的限制,照片经常会出现一些问题,例如,姿态角太大,共面或非共面控制点处理以及控制点较少,这导致现有算法可能无法满足高精度姿态估计。针对这一问题,本文提出了一种新的姿态估计方法。首先,通过在相机的最佳位置和姿势之间进行迭代来估计第一个姿势。其次,使用几何关系和物理意义来获取与相机姿态的实际值最接近的值。第三,使用近似相机姿态作为迭代算法的初始值,以获得准确的相机姿态。最后,通过模拟和实际起重机图像实验,将所提出的方法与目前使用的最佳优化方法进行了比较。实验结果表明,该方法准确,稳定,无严重跳变现象发生,可用于港口起重机械的姿态估计。















 6631
6631











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









