






问题描述
在实现在线估计路标点的VI-SLAM时,遇到不一致性的问题,位姿的协方差估计偏低。
原因分析
在执行边缘化时,为了降低信息矩阵的稠密度,只剔除仅被第一帧观测的路标点以及第一帧,其余路标点均保留。具体而言,首先找出第一帧观测到的路标点,分为即将被边缘化的点和被保留的点。执行舒尔补操作后,被保留的点成为下一轮优化时的先验信息。
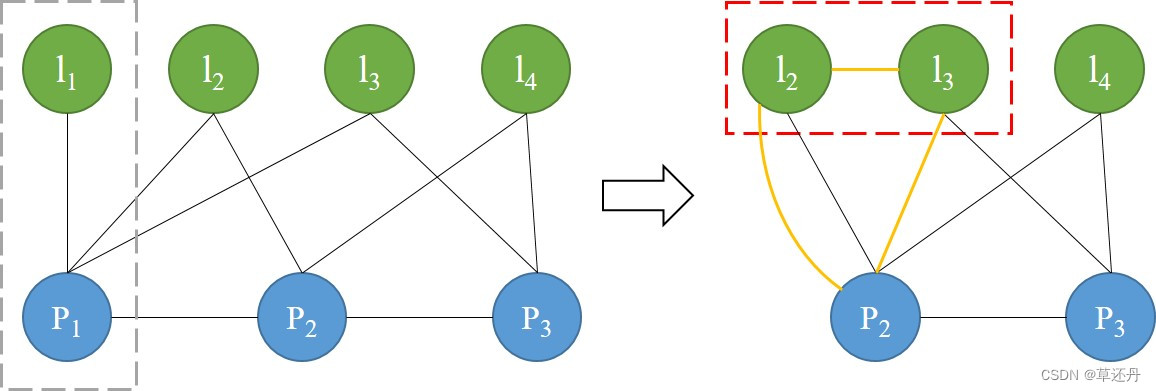
如图所示, p 1 p_1 p1和 l 1 l_1 l1被边缘化得到新的因子图, l 2 l_2 l2、 l 3 l_3 l3被保留在先验信息中。在下一轮构建先验信息矩阵时,由于前述的策略,只有 l 2 l_2 l2、 l 4 l_4 l4被选入了状态向量中,而 l 3 l_3 l3与其他变量在本轮先验信息中的关系则被忽略( l 3 l_3 l3- p 2 p_2 p2、 l 3 l_3 l3- l 2 l_2 l2),这导致边缘化后只存在 l 4 l_4 l4与 p 3 p_3 p3的错误先验信息。
解决方案
- 在构建边缘化需要的先验信息矩阵 Λ = [ Λ m m Λ m r Λ r m Λ r r ] \Lambda=\begin{bmatrix}\Lambda_{mm} & \Lambda_{mr} \\ \Lambda_{rm} & \Lambda_{rr}\end{bmatrix} Λ=[ΛmmΛrmΛmrΛrr]时,将带有先验信息的路标点和新观测到的路标点都要考虑在内。
- 参考VINS-Mono构建先验信息矩阵的方案,逐个矩阵块地添加到整个的信息矩阵中。
...
Lambda = zeros(2 * stateDim + 3 * length(involvedLandmarks));
b = zeros(2 * stateDim + 3 * length(involvedLandmarks), 1);
% 添加IMU约束信息
...
% 添加Visual约束信息
for i = 1:length(involvedLandmarks)
lmId = involvedLandmarks(i);
if ~isempty(find(priorLandmarks == lmId, 1))
[Error, H_pose, H_lm] = visualMeasurement(lmId, obs, state{1}, landmarks);
colIdx = 2 * stateDim + 3 * lmId - 2;
Tk = eye(2);
Lambda(1:stateDim, 1:stateDim) = Lambda(1:stateDim, 1:stateDim) + H_pose' * (Tk \ H_pose);
Lambda(1:stateDim, colIdx:colIdx+2) = Lambda(1:stateDim, colIdx:colIdx+2) + H_pose' * (Tk \ H_lm);
Lambda(colIdx:colIdx+2, 1:stateDim) = Lambda(1:stateDim, colIdx:colIdx+2)';
Lambda(colIdx:colIdx+2, colIdx:colIdx+2) = Lambda(colIdx:colIdx+2, colIdx:colIdx+2) + H_lm' * (Tk \ H_lm);
b(1:stateDim, 1) = b(1:stateDim, 1) + H_pose' * (Tk \ Error);
b(colIdx:colIdx+2, 1) = b(colIdx:colIdx+2, 1) + H_lm' * (Tk \ Error);
end
end
% 添加先验信息
...
NOTE: 更好的方式是参照OpenVINS使用位姿与地图点按照自然顺序排列,比如( p 1 p_1 p1, l 1 l_1 l1, l 2 l_2 l2, l 3 l_3 l3, p 2 p_2 p2, l 4 l_4 l4, p 3 p_3 p3),每一个位姿后伴随着对应的新观测到的地图点,如此在进行路标点管理与边缘化时都更加方便。
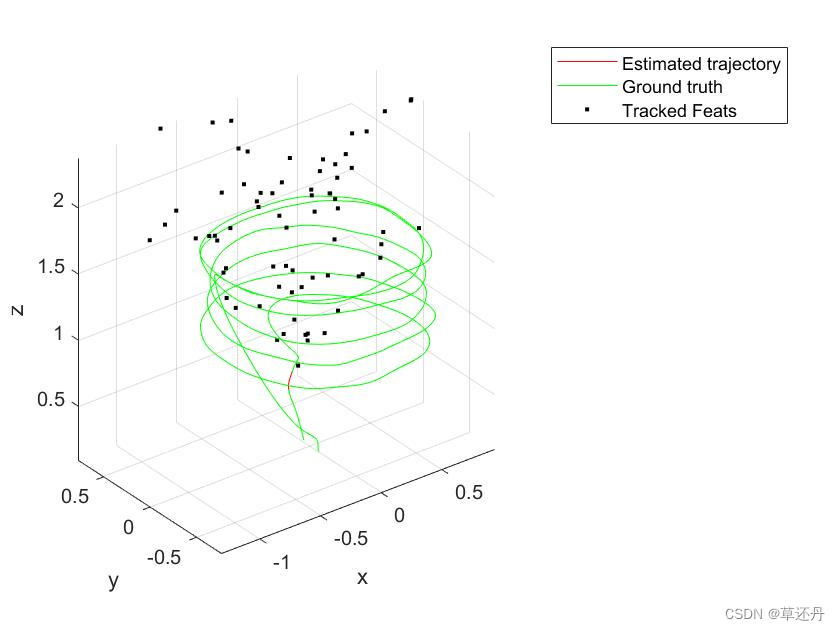
仿真验证
选用Kaist_vio数据集的圆形轨迹,前100秒的运行场景如下:
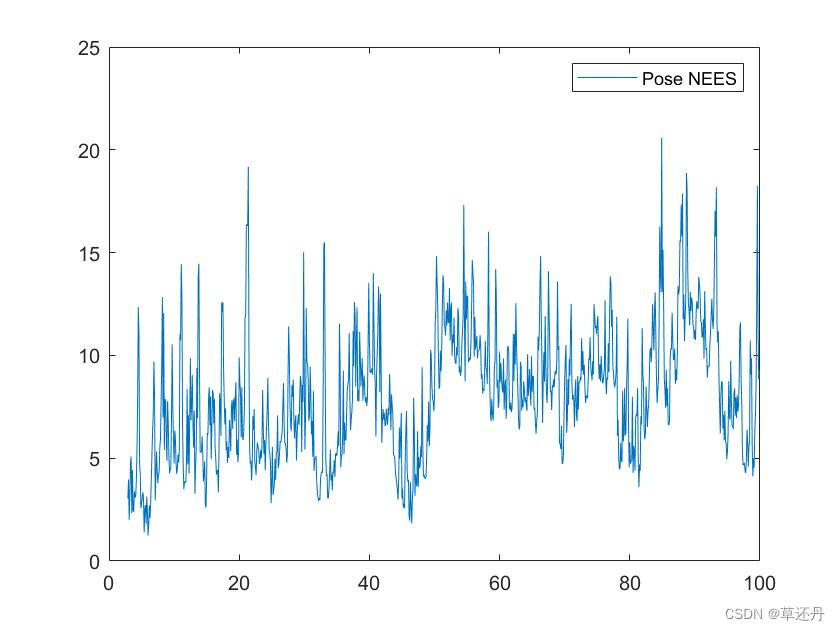
位姿的NEES结果如下:














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









