









sudo apt-get install ros-melodic-turtle-tf
roslaunch turtle_tf turtle_tf_demo.launch
rosrun turtlesim turtle_teleop_key(按上下左右键,有如下图)

rosrun tf view_frames(查看并生成一个pdf)

有三个坐标系,world是全局坐标系,表示仿真器的坐标原点(左下角为原点),turtle1和turtle2是位于两个海龟上面的
**************************************************************************************************
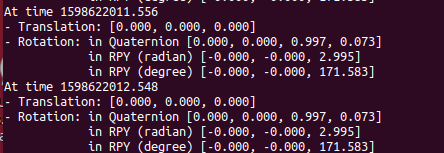
命令行工具:rosrun tf tf_echo turtle1 turtle2(查看两个海龟的坐标)
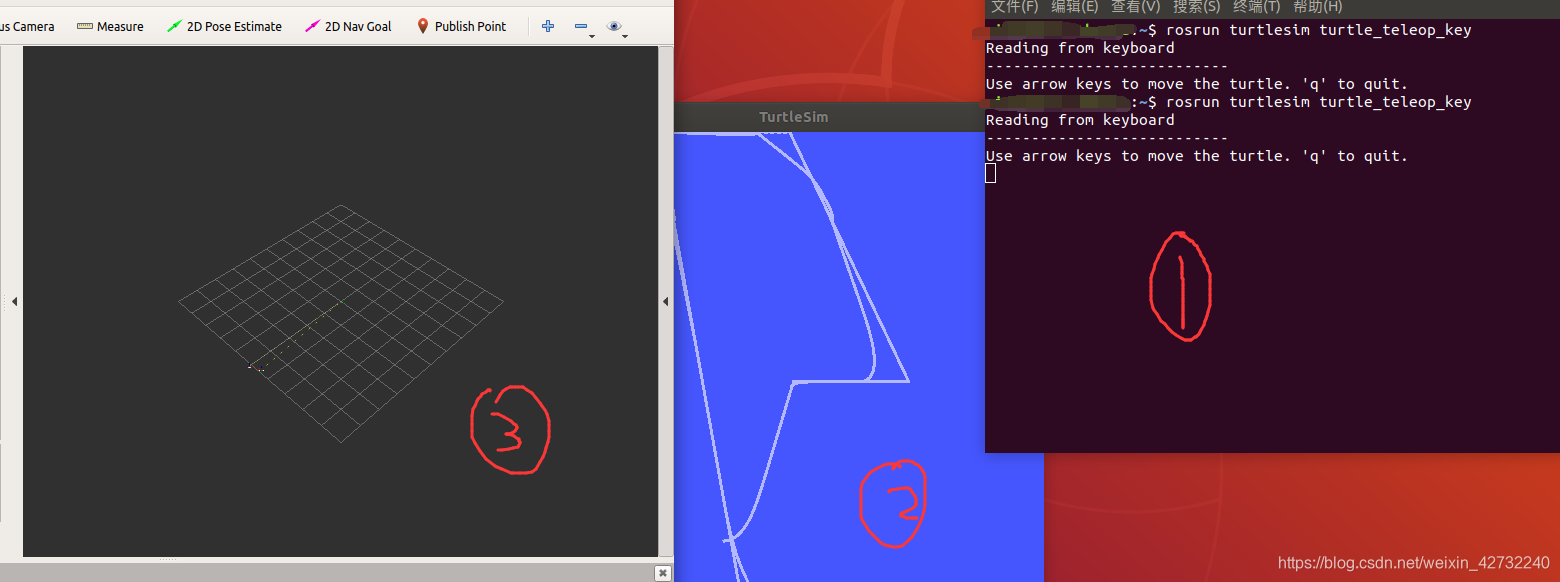
可视化工具: rosrun rviz rviz -d `rospack find turtle_tf` iz/turtle_rviz.rviz


在①中点击上下左右键,发现海龟界面动,同时rivz也在动














 1075
1075











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









