










1 前言
本章主要介绍场景中桁架杆件目标的位姿获取方法及过程。本文采用点云数据配准的方式获取场景目标的位姿信息[50]。通过创建桁架杆件目标的模型点云数据与实际场景中识别的桁架杆件目标的点云数据进行配准,计算两点云数据之间的变换关系,进而求得实际桁架杆件目标的位姿。为了提高两组点云数据在数据配准过程中快速性和准确性,点云数据配准过程分为数据粗配准和数据精配准两部分。本文采用采样一致性算法(SAC_IA)及四点一致性算法(4PCS)作为粗配准算法,分别与精配准算法中的最近点迭代算法(ICP)进行组合,对理想模型点云数据与实际场景点云数据进行实验,验证了不同算法组合方式的配准效果。在实际配准过程中,因桁架杆件自身外形特征单一,采用两套目标杆件的模型点云数据,针对不同视角下获取的实际场景中桁架杆件目标的点云数据,利用点云法线信息,进而选择合适的模型点云数据进行数据配准,求得准确的位姿信息。
2 点云数据配准
点云数据之间的配准主要是通过目标点云与源点云中对应点之间的相互关系,来得到点集与点集之间的相对位姿变换关系。本文中,首先对桁架杆件目标的模型点云数据(源点云)进行位姿修正,将源点云坐标系与相机坐标系重合,从而得到源点云在相机坐标系下的初始位姿,由于目标点云的坐标系默认是相机坐标系,因此通过数据配准能够获取同相机坐标系下的源点云与目标点云之间的位姿关系。点云数据配准过程,即源点云与目标点云通过一定的坐标变换实现重合的过程。
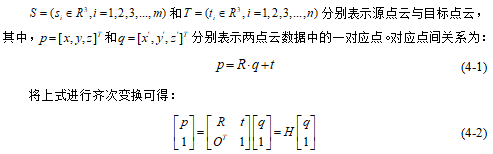

3 点云数据粗配准
点云数据粗配准是利用源点云与目标点云之间少数点对特征之间的位姿变换近似表示两点云集之间的位姿,减少了配准过程的评估量和计算量,配准耗时大幅减少,同时为数据精配准提供了良好的初始位姿,避免对待配准的两组点云数据集在精配准过程中因相对位姿复杂及其他噪声干扰等问题,陷入局部最优解中[51,52],造成配准失误。本文主要采用的点云数据粗配准算法有采样一致性配准算法和四点一致性配准算法。
3.1 SAC_IA粗配准算法
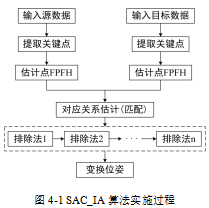
采样一致性配准算法(Sample Consensus Initial Alignment,SAC_IA)作为粗配准算法,快速获取场景中目标的粗略位姿,其实现过程取决于点对特征,点对特征通过快速点特征直方图(FPFH)进行特征描述[53]。通过少量点对之间的特征描述,从目标点云中提取多组对应关系进行匹配估计,寻找最优的变换。该算法的实施流程如图4-1所示。

3.2 4PCS粗配准算法

















 680
680











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









