







 该博客介绍了6-DOF-ConvGPD,一种用于机器人抓取的算法,利用未知物体的三维点云特征。文章包含github链接、B站视频和相关论文,探讨了抓取操作的影响因素、方法流程,并展示了单物体和多物体抓取的实验结果。依赖项包括PCL库和Libtorch。
该博客介绍了6-DOF-ConvGPD,一种用于机器人抓取的算法,利用未知物体的三维点云特征。文章包含github链接、B站视频和相关论文,探讨了抓取操作的影响因素、方法流程,并展示了单物体和多物体抓取的实验结果。依赖项包括PCL库和Libtorch。
代码、视频与论文
github
https://github.com/quxiaochang/6-DOF-ConvGPD.
B站
https://github.com/quxiaochang/6-DOF-ConvGPD.
论文
http://jcta.alljournals.ac.cn/cta_cn/ch/reader/view_abstract.aspx?file_no=CCTA210403&flag=1
摘要
(自己论文查重竟然查到了自己投稿简介,( ╯□╰ ),暂时先删了,后面补上)
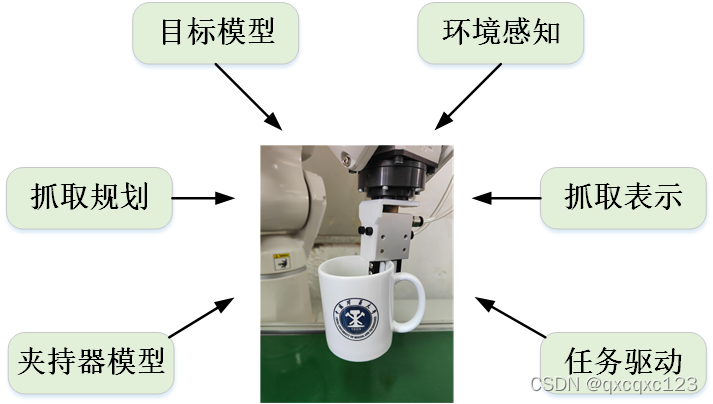
抓取操作影响因素
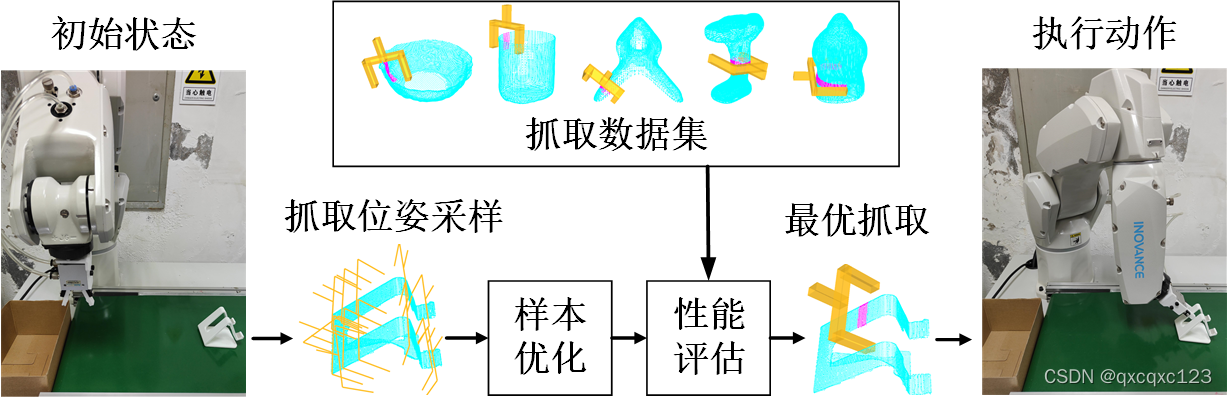
方法流程
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 790
790

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









