







Modern Robotics
正向运动
正向运动是指根据给定的关节转角
θ
\theta
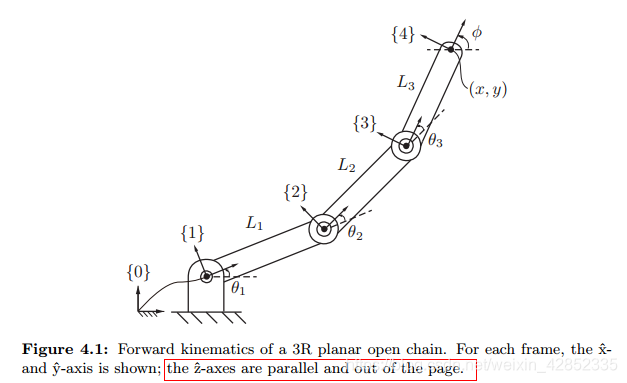
θ 来计算末端执行器的位置与方向。图4.1展示了一个3R平面开链式机械臂的正向运动问题。连杆的长度分别为
L
1
,
L
2
,
L
3
L_1, L_2, L_3
L1,L2,L3。选取
{
0
}
\{0\}
{0}为固定坐标系,原点与基关节重合,并且假设坐标系
{
4
}
\{4\}
{4}固连于第三个连杆的顶部。则末端执行器的位置和方向可以计算如下:
x
=
L
1
c
o
s
θ
1
+
L
2
c
o
s
(
θ
1
+
θ
2
)
+
L
3
c
o
s
(
θ
1
+
θ
2
+
θ
3
)
y
=
L
1
s
i
n
θ
1
+
L
2
s
i
n
(
θ
1
+
θ
2
)
+
L
3
s
i
n
(
θ
1
+
θ
2
+
θ
3
)
ϕ
=
θ
1
+
θ
2
+
θ
3
\begin{aligned} x &= L_1cos\theta_1 + L_2cos(\theta_1+\theta_2)+L_3cos(\theta_1+\theta_2+\theta_3) \\ y &= L_1sin\theta_1 + L_2sin(\theta_1+\theta_2) + L_3sin(\theta_1+\theta_2+\theta_3) \\ \phi &= \theta_1 + \theta_2 + \theta_3 \end{aligned}
xyϕ=L1cosθ1+L2cos(θ1+θ2)+L3cos(θ1+θ2+θ3)=L1sinθ1+L2sin(θ1+θ2)+L3sin(θ1+θ2+θ3)=θ1+θ2+θ3
一种更系统的方法是在每个连杆上都固连一个坐标系,如图4.1的
{
1
}
\{1\}
{1},
{
2
}
\{2\}
{2},
{
3
}
\{3\}
{3}。这样,正向运动可以写成四个齐次变换矩阵的乘积:
(4.4)
T
04
=
T
01
T
12
T
23
T
34
T_{04} = T_{01}T_{12}T_{23}T_{34} \tag{4.4}
T04=T01T12T23T34(4.4)
其中,
(4.5)
T
01
=
[
c
o
s
θ
1
−
s
i
n
θ
1
0
0
s
i
n
θ
1
c
o
s
θ
1
0
0
0
0
1
0
0
0
0
1
]
,
T
12
=
[
c
o
s
θ
2
−
s
i
n
θ
2
0
L
1
s
i
n
θ
2
c
o
s
θ
2
0
0
0
0
1
0
0
0
0
1
]
,
T
23
=
[
c
o
s
θ
3
−
s
i
n
θ
3
0
L
2
s
i
n
θ
3
c
o
s
θ
3
0
0
0
0
1
0
0
0
0
1
]
,
T
34
=
[
1
0
0
L
3
0
1
0
0
0
0
1
0
0
0
0
1
]
.
\begin{aligned} T_{01} &= \left[ \begin{matrix} cos\theta_1 &- sin\theta_1 & 0 & 0\\ sin\theta_1 & cos\theta_1 & 0 & 0\\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{matrix} \right], \quad T_{12} = \left[ \begin{matrix} cos\theta_2 &- sin\theta_2 & 0 & L_1\\ sin\theta_2 & cos\theta_2 & 0 & 0\\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{matrix} \right],\\ T_{23} &= \left[ \begin{matrix} cos\theta_3 &- sin\theta_3 & 0 & L_2\\ sin\theta_3 & cos\theta_3 & 0 & 0\\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{matrix} \right], \quad T_{34} = \left[ \begin{matrix} 1 & 0 & 0 & L_3\\ 0 & 1 & 0 & 0\\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{matrix} \right]. \tag{4.5} \end{aligned}
T01T23=⎣⎢⎢⎡cosθ1sinθ100−sinθ1cosθ10000100001⎦⎥⎥⎤,T12=⎣⎢⎢⎡cosθ2sinθ200−sinθ2cosθ2000010L1001⎦⎥⎥⎤,=⎣⎢⎢⎡cosθ3sinθ300−sinθ3cosθ3000010L2001⎦⎥⎥⎤,T34=⎣⎢⎢⎡100001000010L3001⎦⎥⎥⎤.(4.5)
注意到,
T
34
T_{34}
T34 是常量,并且
T
i
−
1
,
i
T_{i-1, i}
Ti−1,i 只依赖于关节转角
θ
i
\theta_i
θi。
另一种方法,我们把所有关节转角为0时的末端执行器的位置和方向定义为
M
M
M 矩阵,则有:
(4.6)
M
=
[
1
0
0
L
1
+
L
2
+
L
3
0
1
0
0
0
0
1
0
0
0
0
1
]
,
M = \left[ \begin{matrix} 1 &0& 0 & L_1+L_2+L_3\\ 0 & 1 & 0 & 0\\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{matrix} \right], \tag{4.6}
M=⎣⎢⎢⎡100001000010L1+L2+L3001⎦⎥⎥⎤,(4.6)
现在我们把每个旋转轴关节当作为一个零螺距的旋量轴。假设
θ
1
\theta_1
θ1 与
θ
2
\theta_2
θ2 均为0,那么绕关节 3 旋转的旋量轴在
{
0
}
\{0\}
{0}坐标系的表示为:
S
3
=
[
w
3
v
3
]
=
[
0
0
1
0
−
(
L
1
+
L
2
)
0
]
\mathcal{S}_3 = \left[ \begin{matrix} w_3 \\ v_3 \end{matrix} \right] = \left[ \begin{matrix} 0 \\ 0 \\ 1 \\ 0 \\ -(L_1 + L_2) \\ 0 \end{matrix} \right]
S3=[w3v3]=⎣⎢⎢⎢⎢⎢⎢⎡0010−(L1+L2)0⎦⎥⎥⎥⎥⎥⎥⎤
其中,
v
3
=
−
w
3
×
q
3
v_3 = -w_3 \times q_3
v3=−w3×q3,
q
3
q_3
q3 是在坐标系
{
0
}
\{0\}
{0}下的关节3旋转轴上的任一点,比如
q
3
=
(
L
1
+
L
2
,
0
,
0
)
q_3 = (L_1 + L_2, 0, 0)
q3=(L1+L2,0,0)。
旋量轴
S
3
\mathcal{S}_3
S3 可以用
s
e
(
3
)
se(3)
se(3)下的矩阵形式表示为:
[
S
3
]
=
[
[
w
]
v
0
0
]
=
[
0
−
1
0
0
1
0
0
−
(
L
1
+
L
2
)
0
0
0
0
0
0
0
0
]
.
[\mathcal{S}_3] = \left[ \begin{matrix} [w] & v\\ 0 & 0 \end{matrix} \right] = \left[ \begin{matrix} 0 & -1 & 0 & 0 \\ 1 & 0 & 0 & -(L_1+L_2) \\ 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \end{matrix} \right] .
[S3]=[[w]0v0]=⎣⎢⎢⎡0100−100000000−(L1+L2)00⎦⎥⎥⎤.
对于任意的
θ
3
\theta_3
θ3,旋量运动的矩阵指数表示可以写成:
(4.7)
T
04
=
e
[
S
3
]
θ
3
M
(
f
o
r
θ
1
=
θ
2
=
0
)
T_{04} = e^{[\mathcal{S}_3]\theta_3}M \quad \quad (for \quad\theta_1 = \theta_2 =0) \tag{4.7}
T04=e[S3]θ3M(forθ1=θ2=0)(4.7)
现在让
θ
1
=
0
\theta_1 = 0
θ1=0 ,任意固定的
θ
3
\theta_3
θ3,绕着关节2的旋转可以看作这样的旋量运动:
(4.8)
T
04
=
e
[
S
2
]
θ
2
e
[
S
3
]
θ
3
M
(
f
o
r
θ
1
=
0
)
T_{04} = e^{[\mathcal{S}_2]\theta_2}e^{[\mathcal{S}_3]\theta_3}M \quad \quad (for \quad\theta_1 =0) \tag{4.8}
T04=e[S2]θ2e[S3]θ3M(forθ1=0)(4.8)
其中,
[
S
3
]
,
M
[\mathcal{S}_3],M
[S3],M 在前面已经定义,
(4.9)
[
S
2
]
=
[
0
−
1
0
0
1
0
0
−
L
1
0
0
0
0
0
0
0
0
]
.
[\mathcal{S}_2] = \left[ \begin{matrix} 0 & -1 & 0 & 0 \\ 1 & 0 & 0 & -L_1 \\ 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \end{matrix} \right] .\tag{4.9}
[S2]=⎣⎢⎢⎡0100−100000000−L100⎦⎥⎥⎤.(4.9)
最终,让
θ
2
\theta_2
θ2,
θ
3
\theta_3
θ3 保持固定,绕关节1的旋转可以认为是整个刚体连杆体的旋量运动。有:
(4.10)
T
04
=
e
[
S
1
]
θ
1
e
[
S
2
]
θ
2
e
[
S
3
]
θ
3
M
T_{04} = e^{[\mathcal{S}_1]\theta_1}e^{[\mathcal{S}_2]\theta_2}e^{[\mathcal{S}_3]\theta_3}M \quad \tag{4.10}
T04=e[S1]θ1e[S2]θ2e[S3]θ3M(4.10)
其中:
(4.11)
[
S
1
]
=
[
0
−
1
0
0
1
0
0
0
0
0
0
0
0
0
0
0
]
.
[\mathcal{S}_1] = \left[ \begin{matrix} 0 & -1 & 0 & 0 \\ 1 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \end{matrix} \right] .\tag{4.11}
[S1]=⎣⎢⎢⎡0100−100000000000⎦⎥⎥⎤.(4.11)
注意到,这里仅定义了
{
0
}
\{0\}
{0}坐标系与
M
M
M。这种方法叫做product of exponentials(PoE)区别于DH参数法。详情需了解DH参数法。
指数公式的乘积
使用 P o E PoE PoE 公式,只需要指定一个固定坐标系 { s } \{s\} {s}(比如固结于机器人的固定基座),与各关节均在零位时的末端执行器的坐标系 { b } \{b\} {b},用 M M M 来表示。
第一个公式:在固定坐标系下的旋量轴
P
o
E
PoE
PoE 公式的关键概念是把每个关节当做在所有连杆上的旋量运动。如图4.2所示的通用开式链,由
n
n
n 个自由度为1的关节链接而成。固定坐标系选取如图。
M
∈
S
E
(
3
)
M \in SE(3)
M∈SE(3) 来表示零位状态下末端坐标系相对于固定坐标系的位置与方向。
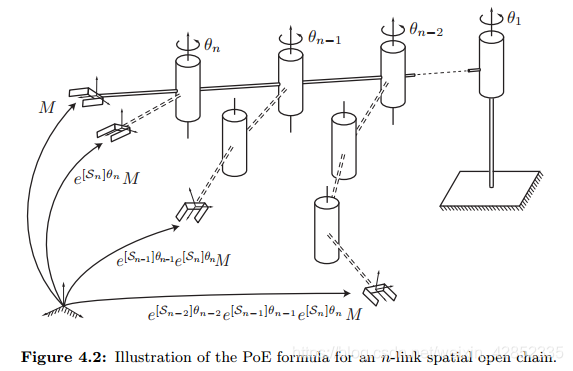
现在假设关节
n
n
n 转动了
θ
n
\theta_n
θn 角度,则末端的
M
M
M 经历了一个如下形式的移动:
(4.12)
T
=
e
[
S
n
]
θ
n
M
T= e^{[\mathcal{S}_n]\theta_n}M \tag{4.12}
T=e[Sn]θnM(4.12)
其中,
T
∈
S
E
(
3
)
T\in SE(3)
T∈SE(3),是末端执行器新的方位,
S
n
=
(
w
n
,
v
n
)
\mathcal{S}_n=(w_n, v_n)
Sn=(wn,vn) 是固定坐标系下关节
n
n
n 的旋量轴。
假设关节
n
−
1
n-1
n−1 也变化,那就相当于在连杆
n
−
1
n-1
n−1 上施加一个旋量运动,如下:
(4.13)
T
=
e
[
S
n
−
1
]
θ
n
−
1
e
[
S
n
]
θ
n
M
T= e^{[\mathcal{S}_{n-1}]\theta_{n-1}}e^{[\mathcal{S}_n]\theta_n}M \tag{4.13}
T=e[Sn−1]θn−1e[Sn]θnM(4.13)
继续这样的过程,可以得到:
(4.14)
T
=
e
[
S
1
]
θ
1
⋯
e
[
S
n
−
1
]
θ
n
−
1
e
[
S
n
]
θ
n
M
T= e^{[\mathcal{S}_{1}]\theta_{1}} \cdots e^{[\mathcal{S}_{n-1}]\theta_{n-1}}e^{[\mathcal{S}_n]\theta_n}M \tag{4.14}
T=e[S1]θ1⋯e[Sn−1]θn−1e[Sn]θnM(4.14)
上式即描述了一个
n
n
n 自由度的开式链的指数公式乘积。注意前提是旋量轴在表达在固定坐标系的。
应用公式需要的量总结如下:
- 机器人在零位时的末端执行器的方位 M ∈ S E ( 3 ) M \in SE(3) M∈SE(3)。
- 机器人零位状态下,在固定坐标系下的旋量轴 S 1 , ⋯   , S n \mathcal{S}_{1}, \cdots,\mathcal{S}_{n} S1,⋯,Sn。
- 关节转角 θ 1 , ⋯   , θ n \theta_1, \cdots, \theta_n θ1,⋯,θn。
示例
如图4.4,是一个6个均为旋转关节的开式链。
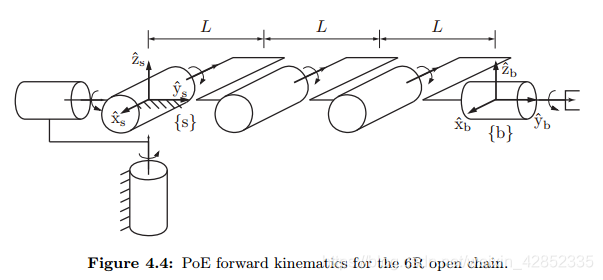
图中展示的是各关节均在零位时的状态。末端执行器的坐标系
M
M
M 在零位时如下:
(4.15)
M
=
[
1
0
0
0
0
1
0
3
L
0
0
1
0
0
0
0
1
]
.
M = \left[ \begin{matrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 3L \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{matrix} \right] .\tag{4.15}
M=⎣⎢⎢⎡10000100001003L01⎦⎥⎥⎤.(4.15)
下面对6个关节的
w
,
v
w, v
w,v 分别描述:
- 关节1的旋量轴方向为 w 1 = ( 0 , 0 , 1 ) w_1 = (0,0,1) w1=(0,0,1),轴1上的一点 q 1 q_1 q1 最便捷的选择的是落在固定坐标系的原点处,所以 v 1 = ( 0 , 0 , 0 ) v_1 = (0,0,0) v1=(0,0,0)。
- 关节2的旋量轴沿着固定坐标系的 y ^ \hat{y} y^ 方向,所以 w 2 = ( 0 , 1 , 0 ) w_2=(0,1,0) w2=(0,1,0),选取 q 2 = ( 0 , 0 , 0 ) q_2 = (0,0,0) q2=(0,0,0),则 v 2 = ( 0 , 0 , 0 ) v_2 = (0,0,0) v2=(0,0,0)。
- 关节3的旋量轴方向为 w 3 = ( − 1 , 0 , 0 ) w_3=(-1,0,0) w3=(−1,0,0),选取 q 3 = ( 0 , 0 , 0 ) q_3 = (0,0,0) q3=(0,0,0),则 v 3 = ( 0 , 0 , 0 ) v_3 = (0,0,0) v3=(0,0,0)。
- 关节4的旋量轴方向为 w 4 = ( − 1 , 0 , 0 ) w_4=(-1,0,0) w4=(−1,0,0),选取 q 4 = ( 0 , L , 0 ) q_4 = (0,L,0) q4=(0,L,0),则 v 4 = ( 0 , 0 , L ) v_4 = (0,0,L) v4=(0,0,L)。
- 关节5的旋量轴方向为 w 5 = ( − 1 , 0 , 0 ) w_5=(-1,0,0) w5=(−1,0,0),选取 q 5 = ( 0 , 2 L , 0 ) q_5 = (0,2L,0) q5=(0,2L,0),则 v 5 = ( 0 , 0 , 2 L ) v_5 = (0,0,2L) v5=(0,0,2L)。
- 关节6的旋量轴方向为 w 6 = ( 0 , 1 , 0 ) w_6=(0,1,0) w6=(0,1,0),选取 q 6 = ( 0 , 0 , 0 ) q_6 = (0,0,0) q6=(0,0,0),则 v 6 = ( 0 , 0 , 0 ) v_6 = (0,0,0) v6=(0,0,0)。
第二个公式:在末端执行器坐标系下的旋量轴
根据前述文章关于线性微分方程的一些结论中提到的,
e
M
−
1
P
M
=
M
−
1
e
P
M
e^{M^{-1}PM} = M^{-1}e^PM
eM−1PM=M−1ePM,也可以表示成
M
e
M
−
1
P
M
=
e
P
M
Me^{M^{-1}PM}=e^{P}M
MeM−1PM=ePM。让我们把这个结论用于式4.14,推导如下:
(4.16)
T
(
θ
)
=
e
[
S
1
]
θ
1
⋯
e
[
S
n
]
θ
n
M
=
e
[
S
1
]
θ
1
⋯
M
e
M
−
1
[
S
n
]
M
θ
n
=
e
[
S
1
]
θ
1
⋯
M
e
M
−
1
[
S
n
−
1
]
M
θ
n
−
1
e
M
−
1
[
S
n
]
M
θ
n
=
M
e
M
−
1
[
S
1
]
M
θ
1
⋯
e
M
−
1
[
S
n
−
1
]
M
θ
n
−
1
e
M
−
1
[
S
n
]
M
θ
n
=
M
e
[
B
1
]
θ
1
⋯
e
[
B
n
−
1
]
θ
n
−
1
e
[
B
n
]
θ
n
\begin{aligned} T(\theta) &= e^{[\mathcal{S}_{1}]\theta_{1}} \cdots e^{[\mathcal{S}_n]\theta_n}M \\ &= e^{[\mathcal{S}_{1}]\theta_{1}} \cdots Me^{M^{-1}[\mathcal{S}_{n}]M\theta_{n}} \\ &= e^{[\mathcal{S}_{1}]\theta_{1}} \cdots Me^{M^{-1}[\mathcal{S}_{n-1}]M\theta_{n-1}}e^{M^{-1}[\mathcal{S}_{n}]M\theta_{n}} \\ &= Me^{M^{-1}[\mathcal{S}_{1}]M\theta_{1}} \cdots e^{M^{-1}[\mathcal{S}_{n-1}]M\theta_{n-1}}e^{M^{-1}[\mathcal{S}_{n}]M\theta_{n}} \\ &= Me^{[\mathcal{B}_1]\theta_{1}} \cdots e^{[\mathcal{B}_{n-1}]\theta_{n-1}}e^{[\mathcal{B}_{n}]\theta_{n}} \tag{4.16} \end{aligned}
T(θ)=e[S1]θ1⋯e[Sn]θnM=e[S1]θ1⋯MeM−1[Sn]Mθn=e[S1]θ1⋯MeM−1[Sn−1]Mθn−1eM−1[Sn]Mθn=MeM−1[S1]Mθ1⋯eM−1[Sn−1]Mθn−1eM−1[Sn]Mθn=Me[B1]θ1⋯e[Bn−1]θn−1e[Bn]θn(4.16)
其中,
[
B
i
]
=
M
−
1
[
S
i
]
M
[\mathcal{B}_i] = M^{-1}[\mathcal{S}_i]M
[Bi]=M−1[Si]M,如
[
B
i
]
=
[
A
d
M
−
1
]
S
i
[\mathcal{B}_i] = [Ad_{M^{-1}}]\mathcal{S}_i
[Bi]=[AdM−1]Si。
式(4.16)是指数公式的另一种表示方法,其每个关节的旋量轴的表达均是在零位状态下的末端坐标系的表示。可参考上述例子进行此种方式的求解。
实例演示
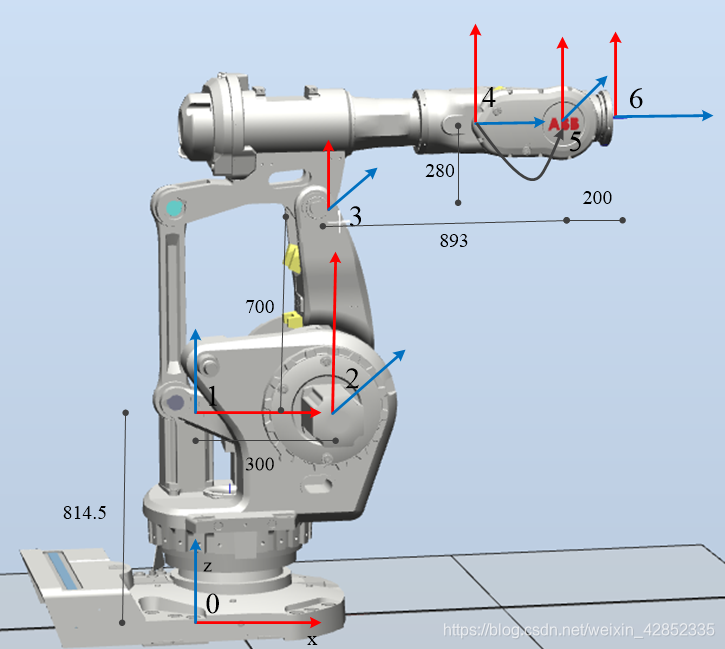
考虑如下图所示的ABB机器人,各参数也已经标示。这里仅以固定坐标系下的运算为例,末端执行器的运算类似。
from py.core import *
if __name__ == '__main__':
w1 = np.array([0, 0, 1])
q1 = np.array([0, 0, 814.5])
v1 = -np.cross(w1, q1)
s1 = np.append(w1, v1)
w2 = np.array([0, 1, 0])
q2 = np.array([300, 0, 814.5])
v2 = -np.cross(w2, q2)
s2 = np.append(w2, v2)
w3 = np.array([0, 1, 0])
q3 = np.array([300, 0, 1514.5])
v3 = -np.cross(w3, q3)
s3 = np.append(w3, v3)
w4 = np.array([1, 0, 0])
q4 = np.array([1193, 0, 1794.5])
v4 = -np.cross(w4, q4)
s4 = np.append(w4, v4)
w5 = np.array([0, 1, 0])
q5 = np.array([1193, 0, 1794.5])
v5 = -np.cross(w5, q5)
s5 = np.append(w5, v5)
w6 = np.array([1, 0, 0])
q6 = np.array([1393, 0, 1794.5])
v6 = -np.cross(w6, q6)
s6 = np.append(w6, v6)
M = np.array([[0, 0, 1, 1393],
[0, -1, 0, 0],
[1, 0, 0, 1794.5],
[0, 0, 0, 1]])
print(M)
S_list = np.array([s1, s2, s3, s4, s5, s6])
print(S_list)
theta_list = np.array(
[np.pi / 2, np.pi / 3, np.pi / 3, np.pi / 6, np.pi / 6, np.pi / 3])
result = FKinSpace(M, S_list.T, theta_list)
print(result)
结果如下,4*4的变换矩阵由 (R, p)组成,代表了旋转与平移。
[[ 9.66506351e-01 5.80127019e-02 -2.50000000e-01 -5.00000000e+01]
[-1.75240474e-01 -5.62500000e-01 -8.08012702e-01 5.40602355e+02]
[-1.87500000e-01 8.24759526e-01 -5.33493649e-01 1.44440585e+02]
[ 0.00000000e+00 0.00000000e+00 0.00000000e+00 1.00000000e+00]]
其中的, F K i n S p a c e ( M , S l i s t . T , t h e t a l i s t ) FKinSpace(M, Slist.T, thetalist) FKinSpace(M,Slist.T,thetalist) 函数主体如下:
def IKinSpace(Slist, M, T, thetalist0, eomg, ev):
"""Computes inverse kinematics in the space frame for an open chain robot
:param Slist: The joint screw axes in the space frame when the
manipulator is at the home position, in the format of a
matrix with axes as the columns
:param M: The home configuration of the end-effector
:param T: The desired end-effector configuration Tsd
:param thetalist0: An initial guess of joint angles that are close to
satisfying Tsd
:param eomg: A small positive tolerance on the end-effector orientation
error. The returned joint angles must give an end-effector
orientation error less than eomg
:param ev: A small positive tolerance on the end-effector linear position
error. The returned joint angles must give an end-effector
position error less than ev
:return thetalist: Joint angles that achieve T within the specified
tolerances,
:return success: A logical value where TRUE means that the function found
a solution and FALSE means that it ran through the set
number of maximum iterations without finding a solution
within the tolerances eomg and ev.
Uses an iterative Newton-Raphson root-finding method.
The maximum number of iterations before the algorithm is terminated has
been hardcoded in as a variable called maxiterations. It is set to 20 at
the start of the function, but can be changed if needed.
Example Input:
Slist = np.array([[0, 0, 1, 4, 0, 0],
[0, 0, 0, 0, 1, 0],
[0, 0, -1, -6, 0, -0.1]]).T
M = np.array([[-1, 0, 0, 0],
[ 0, 1, 0, 6],
[ 0, 0, -1, 2],
[ 0, 0, 0, 1]])
T = np.array([[0, 1, 0, -5],
[1, 0, 0, 4],
[0, 0, -1, 1.6858],
[0, 0, 0, 1]])
thetalist0 = np.array([1.5, 2.5, 3])
eomg = 0.01
ev = 0.001
Output:
(np.array([ 1.57073783, 2.99966384, 3.1415342 ]), True)
"""
thetalist = np.array(thetalist0).copy()
i = 0
maxiterations = 1000
Tsb = FKinSpace(M, Slist, thetalist)
Vs = np.dot(Adjoint(Tsb),
se3ToVec(MatrixLog6(np.dot(TransInv(Tsb), T))))
err = np.linalg.norm([Vs[0], Vs[1], Vs[2]]) > eomg \
or np.linalg.norm([Vs[3], Vs[4], Vs[5]]) > ev
while err and i < maxiterations:
thetalist = thetalist \
+ np.dot(np.linalg.pinv(JacobianSpace(Slist,
thetalist)), Vs)
i = i + 1
Tsb = FKinSpace(M, Slist, thetalist)
Vs = np.dot(Adjoint(Tsb),
se3ToVec(MatrixLog6(np.dot(TransInv(Tsb), T))))
err = np.linalg.norm([Vs[0], Vs[1], Vs[2]]) > eomg \
or np.linalg.norm([Vs[3], Vs[4], Vs[5]]) > ev
return (thetalist, not err)

















 8080
8080

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









