







HLK105/2410B/2420模块测试
-
📌模块资料地址:
https://h.hlktech.com/Mobile/download -
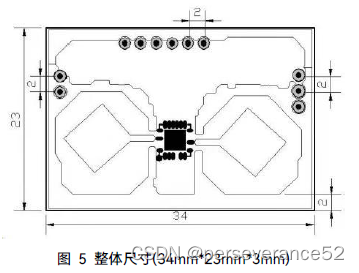
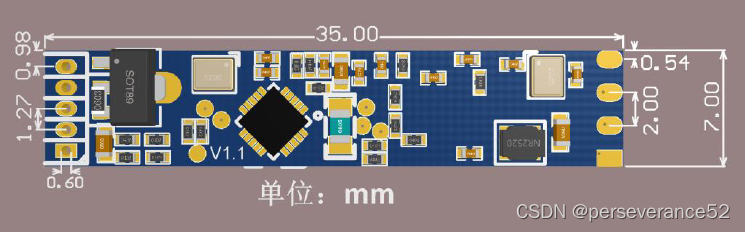
🌿HLK-LD105模块: 10G微波雷达
-
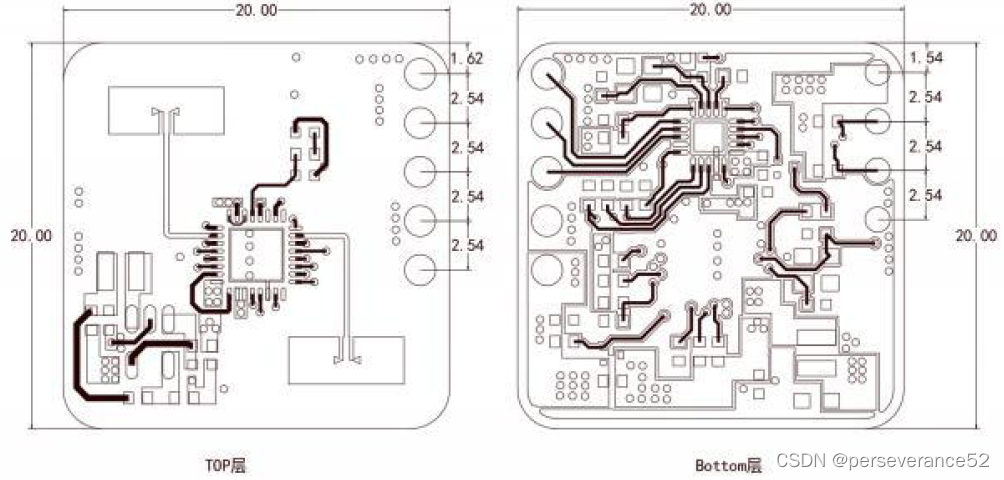
🌿HLK-LD2420-24G:24G毫米波雷达
-
-
-
🌿HLK-LD2410B-24G:24G毫米波雷达,人体存在感应

✨模块使用比较简单,拿到手后,如果不是比较特殊的使用场景,不配置也可以进行使用,配置也比较简单,需要配置的参数不多。除了2410B支持手机APP蓝牙进行配置和OTA升级外,其他模块仅支持USB转TTL工具进行参数配置,需要注意各模块的端子接线间距不一样,使用的时候只需3根线(电源线2根 + 信号输出线)。
📑人体移动检测测试
- ✨对于移动人体检测,这3者都可以做到,差异不到,对于一般人体的微动都可以捕捉到并触发。响应迅速灵敏。如果仅仅是做小范围内(1-8米)人体移动对象检测,那么选择最便宜的即可。
- 🔰对于模块LD2410B和HLK-LD2420-24G在功能上表现差异不明显,LD2410B规格书上描述是可以对静止人体进行侦测,但是HLK-LD2420-24G模块可以对细微的移动人体也是可以侦测到的,在室内测试环境下,基本上测不出多大的差异。但是价格上是其1倍,仅仅多了一个可以通过蓝牙APP来配置参数h和OTA升级功能,其他2款都仅支持USB转TTL,通过电脑端各自相对应的上位机软件进行参数配置。
📜报警输出
- 🌿触发后,三者都是输出TTL 信号,高(3.3V)低(0V)电平.
📑上位机调参
- 🌿三款都对应有各自的上位机设置软件。
- 🌴对于要求不严格的场景,默认的出厂配置基本都可以满足一般需求了,无需再调整参数设置,即可使用。
- 🌿在使用比较特殊的场景,可能仅仅需要调整其触发门限设置(探测距离),输出延时时间(触发后保持该状态的时)。
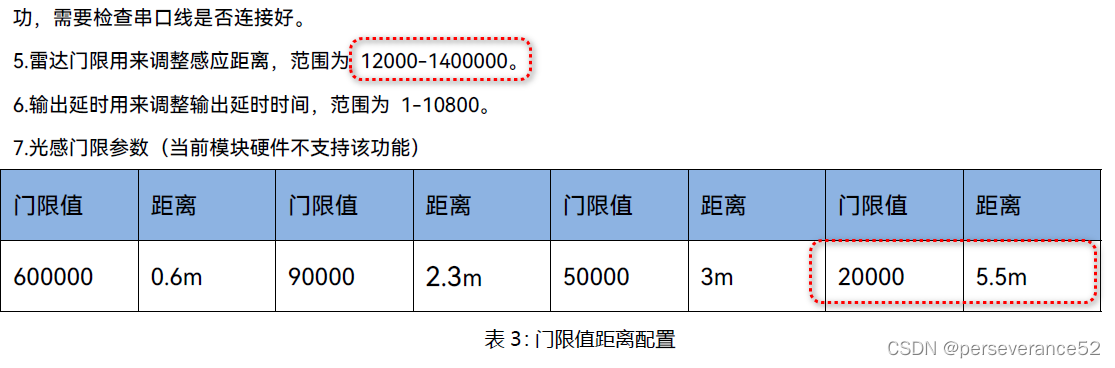
- 🐛目前发现在使用HLK-LD105-10G上位机进行雷达门限配置时,无法设置低于30000数值。换算成距离大概4-5范围,该模块描述是检测距离3 -5米,在配置说明文档上又描述可以设置范围:12000 - 1400000 范围。不知道这算不算bug.

















 2320
2320

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









