









ROS: an open-source Robot Operating System
PS:ROS论文原文,后悔当年没看到
学ROS已经是许多年之前的事情了,当时基本就是用一用API,感觉ros还挺牛。最近看了看ROS2,主要是在分布式和实时性上做了改进,然后又好奇ROS的实现了,扒了原文和代码,比刚开始确实有些长进,做些记录。
Introduction
ROS的目的是减少造轮子,这一点确实做的不错,我们组之前光消息队列就选好几种,后来好歹统一成mqtt了。另外作者很谦虚,说ROS并不是robotics的通解,由于ROS是BSD协议,个人也很想基于这个和特定背景做些东西,挖坑了。
Design goals
这部分蛮重要的,其实是ROS的设计哲学,一共就五条。
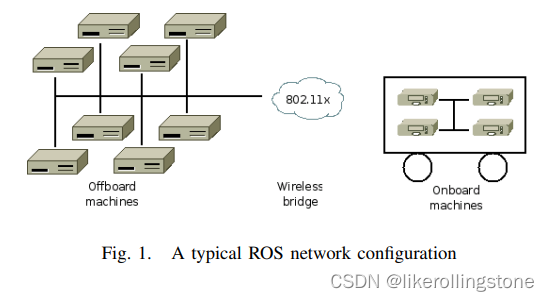
• Peer-to-peer
• Tools-based
• Multi-lingual 这一部分挺重要的,学习学习。
• Thin
• Free and Open-Source
NOMENCLATURE
USE CASES
CONCLUSION
ACKNOWLEDGEMENTS
感谢社区,感谢Octave 、LISP。
没用过LISP,Octave推荐,一言以蔽之,开源matlab。
资源下载
链接:https://pan.baidu.com/s/14wBSlDeInxox6C9egk9UjA
提取码:jenk















 639
639











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









