






SA8775P芯片详细解析
1. 安全岛(Safety Island, SAIL)子系统
模块概述
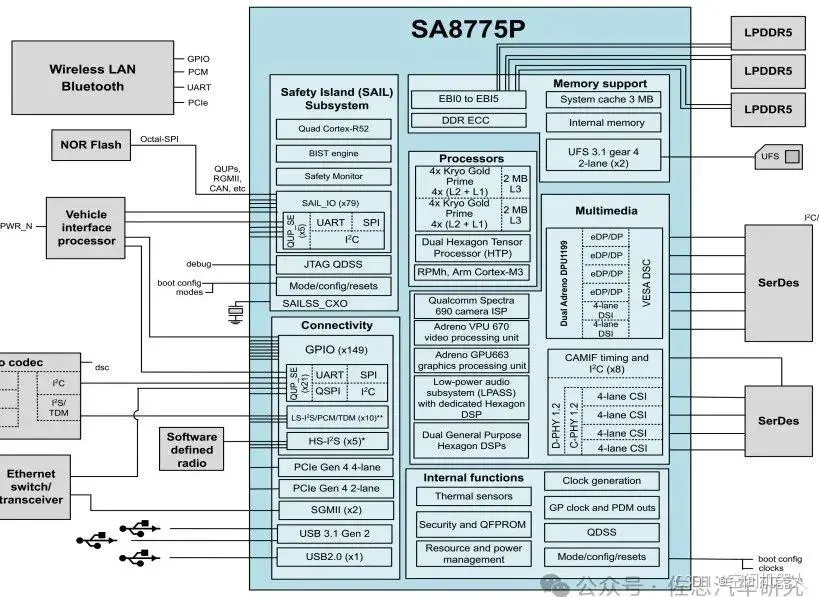
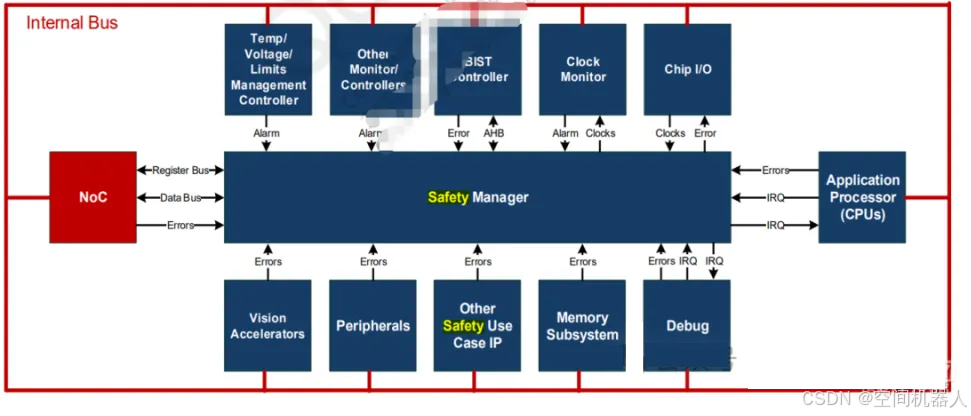
安全岛子系统是SA8775P芯片的重要组成部分,基于Cortex-R52处理器设计,专注于功能安全的实现。它包括BIST(内建自检)、安全监控器和模式配置/复位功能。该模块是车规级芯片设计中不可或缺的部分,主要用于实时监测芯片工作状态,确保系统在异常情况下仍能安全退出或维持最低限度的功能。
技术参数
- Cortex-R52核心:实时处理能力强,符合ASIL-D标准。
- 内置安全监控器:可以检测运行中的故障,比如锁步错误、内存ECC错误。
- JTAG接口:用于调试和故障排查。
- UART/SPI接口:用于与外部设备通信,确保信息传递的安全性。
- BIST引擎:可以对关键电路进行周期性自检,提高系统可靠性。
设计亮点
安全岛的设计确保了功能安全的实现,即便在主处理器出现故障的情况下,安全岛仍能独立运行,避免因系统失控造成的潜在危险。
应用场景
- 自动驾驶域控制器:在L3及以上级别的自动驾驶中,用于确保制动、转向等关键系统的安全操作。
- 动力系统管理:如电动汽车中的电池管理系统(BMS)。
当前技术瓶颈与改进建议
- 瓶颈:安全岛通常需要和主处理器高度配合,但如何降低因通信延迟导致的安全风险仍是一个挑战。
- 改进:采用更高带宽的通信协议,如TSN(时间敏感网络),以减少延迟,提高数据传输可靠性。
修改建议:
以下是对当前内容的完善建议:
-
模块概述:
- 模块概述部分可以加入SA8775P芯片定位的补充说明,比如该芯片在行业中的具体用途和定位,突出其作为高端车载芯片的角色。
-
技术参数:
- 对技术参数中缓存层级的作用进行解释,比如L1缓存如何提升单核性能,L3缓存如何在多核共享时提升整体效率。
- 添加内存带宽相关的数据(如果有),以便让读者更全面地了解芯片性能。
-
设计亮点:
- 针对Dual Hexagon Tensor加速器部分,补充该加速器支持的具体AI框架(如TensorFlow Lite或ONNX)。
- 对Kryo Gold Prime核心增加能效比的比较,比如与其他主流车载芯片的核心性能对比。
-
应用场景:
- 在ADAS和车载信息娱乐系统的应用场景中,加入更具体的例子,例如支持的摄像头数量或帧率(例如ADAS中支持多达8个摄像头的数据实时处理)。
- 添加地图数据加载和更新作为一个场景,突出芯片在实时导航中的优势。
-
技术瓶颈与改进建议:
- 可以将热设计功耗(TDP)超标问题的具体表现形式(如峰值温度数据)进行量化说明。
- 增加散热系统优化的建议,比如热管设计或材料选择(例如石墨片散热),并结合汽车实际环境(如高低温)说明改进措施的意义。
2. 处理器核心
模块概述
SA8775P芯片是一款面向高端智能驾驶和车载信息娱乐系统的多核异构架构芯片。它采用8核架构,包括4个Kryo Gold Prime核心(高性能核心)和4个Kryo Gold核心(能效核心),通过智能调度实现性能与能耗的平衡。
技术参数
- Kryo Gold Prime核心:主频高达2.2 GHz,适合实时高负载任务。
- Kryo Gold核心:主频较低,适合低功耗任务。
- Dual Hexagon Tensor加速器:优化卷积神经网络推理和张量计算,为自动驾驶场景提供高效AI算力支持。
- 缓存架构:
- L1缓存:32 KB指令缓存 + 32 KB数据缓存(每核心)。
- L2缓存:512 KB(每簇核心共享)。
- L3缓存:2 MB共享缓存,提高多核心任务间数据传输效率。
- 内存带宽:支持高达68 GB/s的带宽,满足多摄像头、雷达等高带宽需求。
- 指令集支持:ARMv8架构,兼容主流AI算法库,如TensorFlow Lite、ONNX。
设计亮点
- Kryo Gold Prime核心:适用于ADAS中实时路径规划、目标检测等高性能计算任务。
- Kryo Gold核心:通过后台任务处理优化能效,如车辆状态监测和通信处理。
- Dual Hexagon Tensor加速器:支持动态量化张量计算,可高效运行FP16/INT8等低精度AI推理任务,提升神经网络推理速度并降低功耗。
- 智能任务调度:通过多核异构架构结合AI加速器,实现高效负载分配,提升整体性能。
应用场景
- 高级驾驶辅助系统(ADAS):支持多摄像头输入(多达8个),实时进行目标检测(例如行人、车辆)和路径规划,刷新率达60帧/秒。
- 车载信息娱乐系统:支持高清地图渲染、语音交互,以及360度全景影像处理,确保驾驶体验流畅。
- 智能座舱交互:整合仪表盘、触摸屏和语音控制模块,实现多任务并行处理。
当前技术瓶颈与改进建议
- 瓶颈:在Kryo Gold Prime核心满载运行时,峰值温度可达85°C,可能导致性能下降或触发热保护机制。
- 改进建议:
- 动态电压频率调节(DVFS):根据实时负载动态调整核心电压与频率,降低无效功耗。
- 散热设计优化:建议采用热管+石墨片复合散热方案,在高温环境(如车内50°C)下也能稳定运行。
- 功耗管理算法:引入机器学习预测算法,提前分析核心负载并调整能效模式。
修改建议:
以下是对内容的修改和补充建议,重点在于扩展技术细节、优化表达以及增加应用场景的具体描述:
-
模块概述:
- 对内存子系统的作用做更具体的说明,例如其如何提升芯片在数据处理和实时响应中的性能。
- 提及LPDDR5内存在低功耗和高性能模式切换中的优势。
-
技术参数:
- 补充内存的容量范围(例如支持的最大内存容量)。
- 对内部存储功能补充说明其容量和读写速度。
- 提及LPDDR5的多通道架构(如32位双通道或64位宽度)如何提升数据吞吐量。
-
设计亮点:
- 详细说明LPDDR5技术的优势,如低电压运行(1.05V至0.9V)如何降低能耗。
- 增加DDR ECC的具体实现方式及其对系统可靠性的意义,例如如何在高振动和高温环境下提供数据保护。
-
应用场景:
- 增加内存支持在ADAS(高级驾驶辅助系统)和信息娱乐系统中的具体应用。
- 补充内存支持的并行数据处理能力,例如同时处理摄像头和雷达数据。
-
技术瓶颈与改进建议:
- 对LPDDR5功耗问题进行量化说明,例如在高带宽模式下的典型功耗。
- 提出具体优化建议,例如低功耗状态下的自动降频策略,或引入带有深度睡眠模式的PMIC设计。
3. 内存支持
模块概述
SA8775P的内存子系统采用最新的LPDDR5技术,具备超高带宽和低延迟特性,可满足自动驾驶应用对数据传输和存储的高性能要求。同时配备3 MB的系统缓存和内部存储,为实时处理和关键任务数据的存储提供保障。
技术参数
- LPDDR5内存:支持高达6400 Mbps的数据传输速率,采用32位双通道架构,最大容量可达16 GB。
- 内部存储:内置存储适用于保存启动代码、固件和关键数据,典型容量为16 MB,支持高可靠性存储方案。
- DDR ECC(错误校正码):实时纠正单比特错误,检测多比特错误,显著提升系统在恶劣环境中的数据可靠性。
- 低功耗特性:支持低电压运行(1.05V至0.9V),并具有深度睡眠模式以进一步降低功耗。
设计亮点
- 高带宽支持:LPDDR5内存的引入满足了自动驾驶系统处理多传感器数据(如摄像头、雷达和激光雷达)的高带宽需求,可同时支持多个高清视频流的实时处理。
- 高可靠性:DDR ECC功能确保数据在高振动、高温等恶劣汽车环境中的准确性,特别适用于需要长时间运行的自动驾驶任务。
- 智能功耗管理:LPDDR5具备动态频率切换功能,能在不同负载模式下自动调整频率和功耗,以延长系统工作时间。
应用场景
- 大规模数据处理:支持车载摄像头、激光雷达、雷达等多传感器的实时数据采集与处理。例如,支持8个高清摄像头的实时图像流数据处理,帧率达60 fps。
- 实时算法计算:为ADAS(高级驾驶辅助系统)中的深度学习算法提供高带宽支持,确保卷积神经网络(CNN)推理过程的流畅性。
- 信息娱乐系统:支持高清地图加载、车内多媒体流播放以及实时语音交互,提升用户体验。
- 高精度定位:结合LPDDR5内存的高带宽和低延迟,优化高精度导航与定位系统的数据读取与计算效率。
当前技术瓶颈与改进建议
- 瓶颈:
- LPDDR5内存在高带宽模式下的功耗较高(典型功耗约为1.1 W),在持续高负载应用中可能导致芯片散热压力增加。
- 在低负载模式下,部分内存模块的待机功耗仍需进一步优化。
- 改进建议:
- 电源管理优化:开发更高效的电源管理芯片(PMIC),支持深度睡眠模式和动态电压调节,进一步降低内存功耗。
- 散热设计优化:结合主动和被动散热方案(如热管+石墨片复合散热),确保内存和芯片在高温环境下运行稳定。
- 负载预测技术:引入基于机器学习的负载预测算法,根据应用场景实时调整内存工作模式,实现性能与功耗的最佳平衡。
4. 多媒体处理
模块概述
多媒体模块集成了Qualcomm Spectra 680图像信号处理器(ISP)和Adreno VPU 670图形处理单元,支持eDP/DP、HDMI等多种接口,专为高性能图像处理与图形渲染任务设计。此模块能够在高分辨率下处理大量图像和视频数据,满足现代车载系统,尤其是自动驾驶系统对视觉感知和实时数据处理的高要求。
技术参数
- ISP支持双摄像头并行处理:Spectra 680ISP可以同时处理来自多个摄像头的数据,适合ADAS(高级驾驶辅助系统)应用,如自动驾驶中的多摄像头视觉处理和环境感知。
- GPU支持OpenGL ES、Vulkan等标准:Adreno VPU 670能够高效地渲染图形,支持主流的图形渲染API(OpenGL ES、Vulkan),提供优异的图形表现和兼容性。
- eDP(Embedded DisplayPort):基于VESA标准,支持高分辨率视频输出,常用于车载显示屏、仪表盘、娱乐系统中,支持高质量图像传输。
- VESA DSC(Display Stream Compression):该技术用于高分辨率图像的无损压缩,可以降低带宽需求,使得传输更高质量的视频和图像变得更加高效。
- 支持高达8K的分辨率输出:在支持8K输出的情况下,图像处理模块可以提供超高清的图像质量,适用于高精度的视觉任务。
设计亮点
- 图像处理能力强大:SA8775P集成的Spectra 680 ISP与Adreno VPU 670 GPU能高效处理复杂的图像和视频数据,确保在高分辨率和高速情况下的流畅运行。
- 多摄像头并行处理:通过双摄像头并行处理,能够实现360度环境感知和高清晰度图像重建,适合自动驾驶和高级驾驶辅助系统。
- 高分辨率输出与压缩技术:支持高达8K的输出分辨率和VESA DSC技术,有助于优化带宽使用,同时保证图像质量,为高端车载显示系统提供了支持。
应用场景
- 车载AR HUD(增强现实抬头显示器):通过集成的高分辨率图像处理和显示能力,SA8775P能够支持车载增强现实抬头显示(HUD)系统,将虚拟信息叠加到驾驶员的视线中,增强驾驶体验和安全性。
- 多摄像头拼接与视觉处理:在自动驾驶中,多个摄像头通过拼接和实时图像处理生成全景视图,增强对环境的感知能力,帮助车辆做出更精准的决策。
当前技术瓶颈与改进建议
- 瓶颈:高性能图像处理和图形渲染需要大量的计算资源,可能带来过高的功耗,特别是在车载系统中,功耗管理显得尤为重要。
- 改进:为了解决功耗问题,建议引入硬件加速器,优化特定算法(如图像处理、视觉识别等)的能效比。同时,可以通过优化系统架构来提高功耗管理效率,例如采用更低功耗的处理模式或睡眠模式,以减少不必要的功耗消耗。
5. 摄像头接口(CAMIF)
模块概述
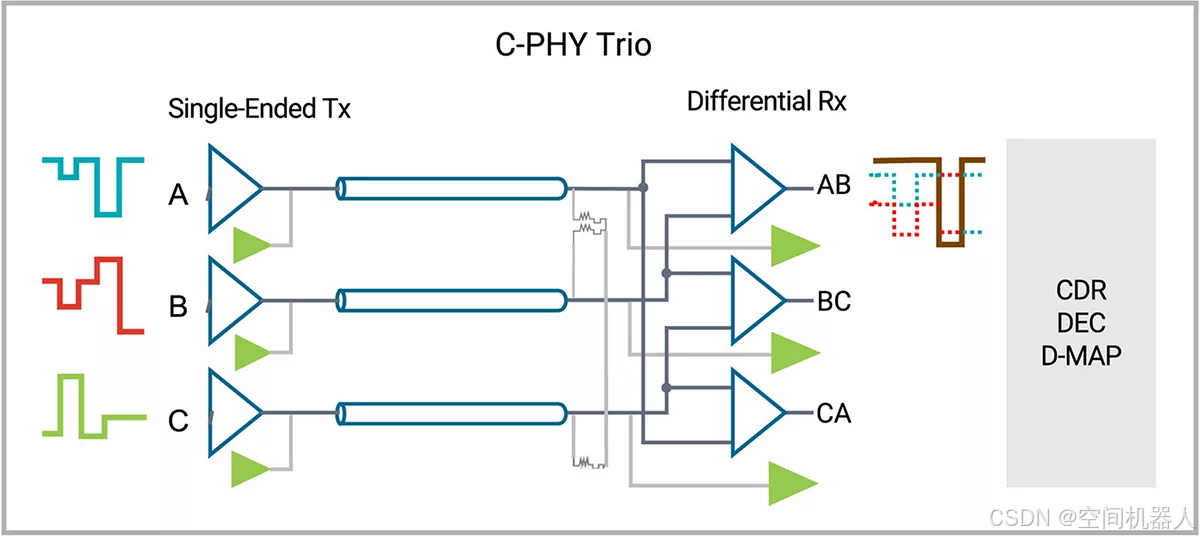
摄像头接口支持DPHY 1.2和CPHY 1.2标准,能够满足高分辨率视频数据传输的需求。
技术参数
- CPHY 1.2:并行接口,每个通道支持高达3.5Gbps的带宽。
- DPHY 1.2:串行接口,支持高达2.5 Gbps的传输速率。
- Lanes(数据通道):支持多通道并行传输,提高吞吐量。
- Timing模块:管理图像信号的时序,对摄像头模块的稳定性至关重要。
D-PHY不同版本最大速率
D-PHY 1.0 :1.0 Gbps
D-PHY 1.1 :1.5 Gbps
D-PHY 1.2 :2.5 Gbps
D-PHY 2.0/2.1: 4.5 Gbps
D-PHY 3.0 :10-14 Gbps
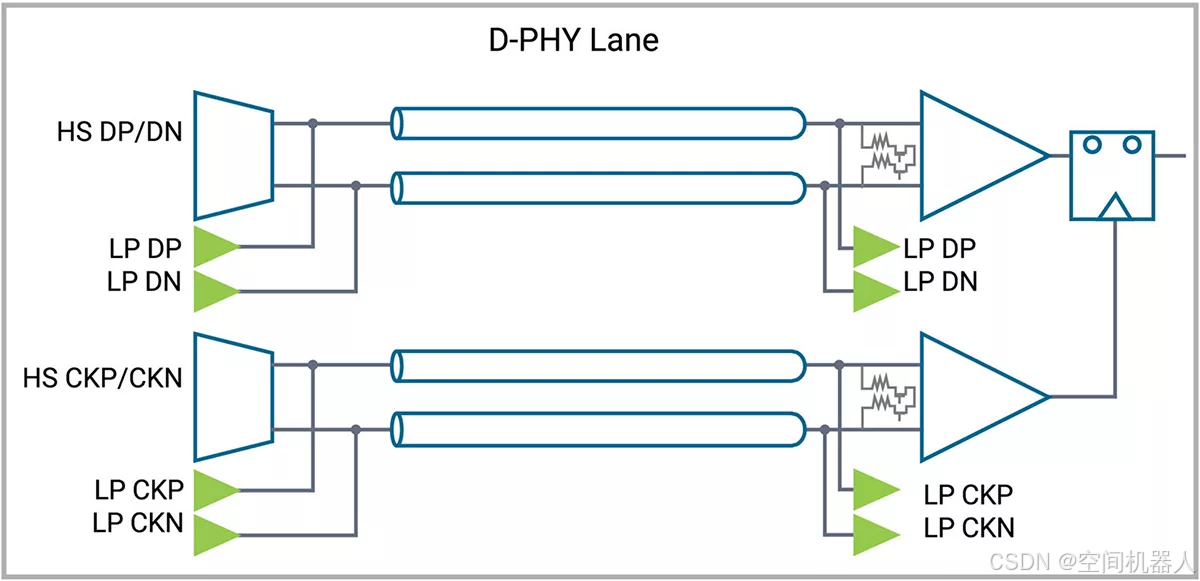
MIPI D-PHY信号电平特点:
不关心接口IC的工作电平,从1.2V-3.3V都可以,具体需要看各厂家接口IC的手册;
HS diff. swing 差分信号摆幅典型值是200mV;
HS diff. 差分信号 |VOD| =(140 min,200 normal,270 max)mV;
HS common level 共模电压 Vcmtx =(150 min,200 normal,250 max)mV;
LP(Low-Power)信号,Low-Power signaling level信号电平典型值1.2V;
LP(Low-Power)信号,Voh =(1.1 min,1.2 normal,1.3 max)V;
LP(Low-Power)信号,Vol =(-50 min,50 max)mV;
设计亮点
支持多种物理层标准和数据通道配置,为多摄像头系统提供了灵活性。
应用场景
- 环视系统:整合来自多个摄像头的画面,生成全景视图。
- 自动泊车:实时处理摄像头信号,生成动态轨迹。
6. 连接模块
模块概述
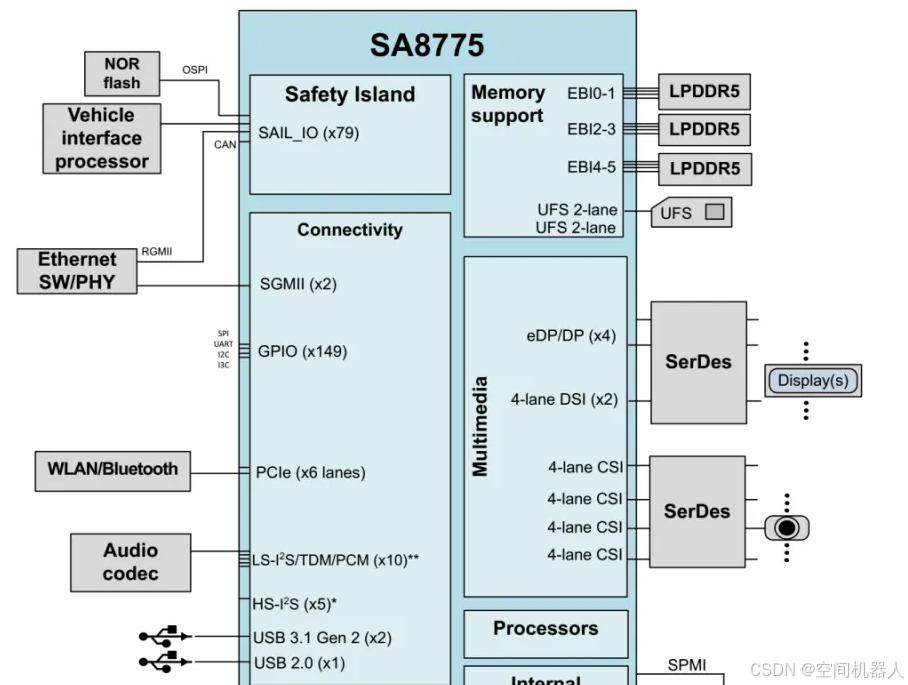
连接模块为SA8775P提供了丰富的外设连接选项,支持多种高速通信协议,包括PCIe、USB 3.0、以太网、CAN等。这些协议使得SA8775P能够与各种外部设备进行高效的数据传输和通信,支持车载系统中复杂的传感器网络和多媒体处理需求。
技术参数
- PCIe Gen 4 x4:提供高达16 GT/s的带宽,适用于高速数据传输,支持高速存储、图形卡或其他外部设备的连接,满足自动驾驶、智能座舱等高数据流要求。
- SGMII(Serial Gigabit Media Independent Interface):串行千兆以太网接口,支持高速的网络连接,适合用于车载网络系统的数据交换,如车载信息娱乐系统或自动驾驶的数据通信。
- SerDes(Serializer/Deserializer):支持高效的串行通信,通常用于视频数据的高速传输,能够减少接口数量并提高带宽利用率,适用于高分辨率摄像头和传感器数据传输。
- USB 3.0:支持5 Gbps的传输速率,适用于连接各种外部设备,如存储、外部摄像头、数据传输设备等。
- CAN FD(Controller Area Network Flexible Data-rate):专为车载网络设计,支持更高的数据传输速率,能够满足车载系统对通信带宽和数据完整性的要求,特别适用于自动驾驶和车辆控制系统。
设计亮点
- 多协议支持:SA8775P支持多种通信协议,具备极高的扩展性,可以与传感器、执行器、显示器等多种外设进行无缝连接,满足不同应用场景下的需求。
- 高带宽和低延迟:通过支持PCIe Gen 4 x4、USB 3.0、SGMII等高速接口,SA8775P能够在车载系统中实现大数据量的实时处理与传输,确保传感器数据、视频流和网络通信的高效稳定。
- 灵活的串行通信:SerDes接口支持灵活的视频数据传输方式,能够适应车载环境中多摄像头和传感器的数据处理需求,降低布线复杂度。
应用场景
- 智能座舱:在智能座舱中,多个显示屏和摄像头需要进行高速数据交换和集成,SA8775P通过支持多种连接接口,能够将座舱内的多个设备高效连接,提供实时图像和信息更新。
- 自动驾驶传感器网络:在自动驾驶系统中,激光雷达、毫米波雷达、摄像头等传感器需要进行实时数据传输与处理。SA8775P通过其高带宽的连接接口(如PCIe、SerDes、SGMII等),为自动驾驶系统提供可靠的传感器网络连接,确保环境感知的准确性和实时性。
当前技术瓶颈与改进建议
- 瓶颈:在同时使用多种通信协议时,可能会出现信号干扰或带宽竞争问题,尤其是在车载环境中,电磁干扰(EMI)和信号完整性是重要挑战。
- 改进:
- 优化信号完整性设计:通过使用更高质量的PCB材料和布线设计技术,减少不同协议之间的信号干扰,提高数据传输的稳定性。
- 加入EMC(电磁兼容)保护措施:在设计中加入电磁屏蔽、滤波器和接地技术,减少电磁干扰,确保各个通信接口的信号质量,避免影响车辆中其他关键系统的正常运行。


















 2320
2320

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











