






车载网络架构的演变:从传统总线到区域架构
随着汽车技术的飞速发展,车载网络(In-Vehicle Network, IVN)经历了从最初简单的分布式架构,到如今高度集成的区域架构(Zonal Architecture)的演变。这一转变主要由车辆对更高效的数据通信、更强的计算能力以及更低的成本的需求推动。同时,新的通信协议,如CAN XL 和 10Base-T1S,正在填补传统车载网络在中等带宽(1 Mbit/s 至 100 Mbit/s)之间的空白,使得IVN更加适应现代汽车电子系统的发展需求。
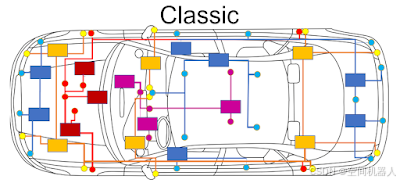
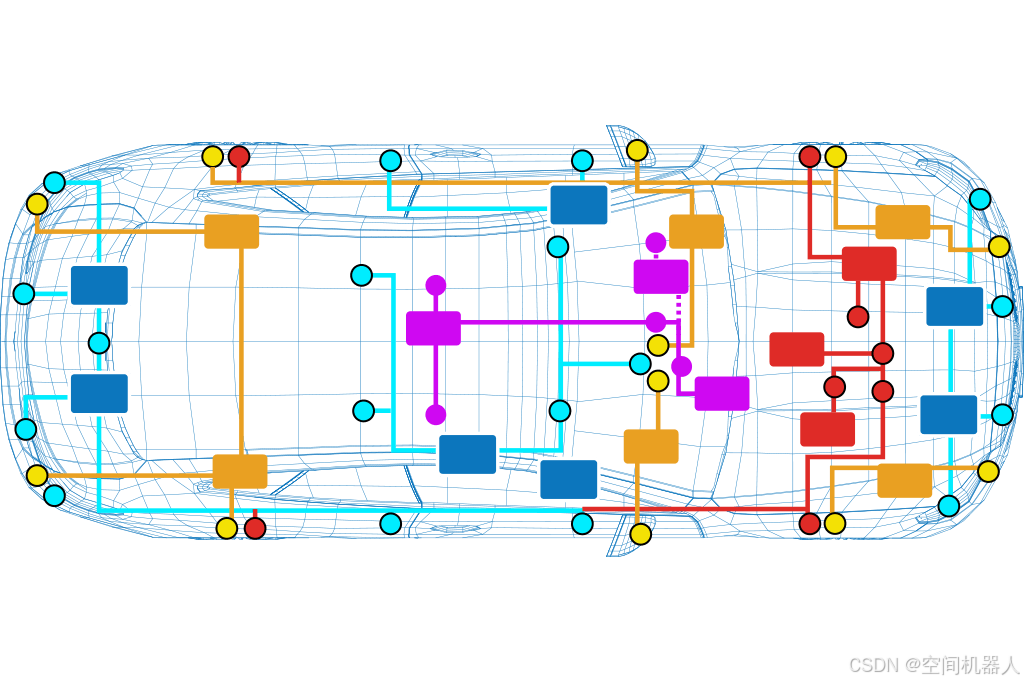
1. 传统车载网络架构:分布式ECU
早期的车载网络架构基于分布式设计,每个电子控制单元(ECU)被放置在靠近其控制的传感器或执行器的位置,并通过独立的总线系统进行通信。典型的总线协议包括:
- CAN(Controller Area Network):用于动力系统和车身控制,速率最高为1 Mbit/s。
- LIN(Local Interconnect Network):用于低速通信(如车窗控制),速率约为19.2 kbit/s。
- FlexRay:适用于对实时性要求较高的应用(如底盘控制),速率可达10 Mbit/s。
- MOST(Media Oriented Systems Transport):用于信息娱乐系统,速率最高可达150 Mbit/s。
虽然这种架构适用于早期的汽车电子系统,但随着ECU数量的增加,布线复杂性、系统成本以及带宽瓶颈成为主要问题。例如,高端车型的ECU数量可能超过150个,而这些ECU之间的连接需要大量线束,增加了整车重量,影响燃油经济性。
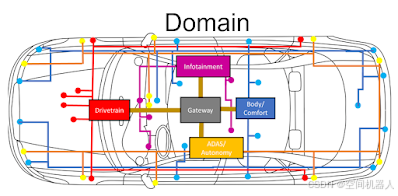
2. 域架构(Domain Architecture):向集中控制迈进
为了降低布线复杂性,域架构(Domain Architecture)开始被采用。该架构将ECU划分为不同的功能域(Domain),如:
- 动力系统域:负责发动机、变速箱、电池管理等控制。
- 车身控制域:管理照明、门锁、空调等功能。
- 信息娱乐域:处理音视频娱乐系统、导航、无线通信等。
- ADAS域(高级驾驶辅助系统):处理雷达、摄像头、自动驾驶等功能。
每个域由一个域控制器(Domain Controller)管理,并通过网关(Gateway)连接其他域。域架构的优点包括:
✅ 减少线束:相比分布式架构,线束长度减少约30%。
✅ 提高系统集成度:域控制器承担更多计算任务,减少了ECU的数量。
✅ 增强安全性:域间通信可通过网关进行隔离,提高网络安全性。
然而,域架构仍然依赖多种通信协议,如CAN、FlexRay和以太网,使得数据交换仍需通过网关进行,带来一定的通信延迟和数据瓶颈。
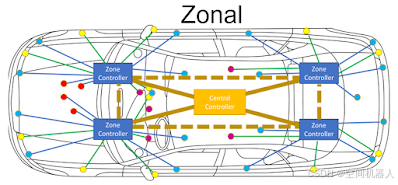
3. 未来趋势:区域架构(Zonal Architecture)
为了进一步提升通信效率并简化布线,最新的**区域架构(Zonal Architecture)**应运而生。在该架构下:
- 车辆被划分为多个物理区域(如前左、前右、后部等)。
- 每个区域由一个**区域控制器(Zonal Controller)**管理,直接连接附近的传感器和执行器。
- 区域控制器之间通过**高速以太网骨干网(Ethernet Backbone)**通信,并与中央计算单元(Central Computer)交互。
区域架构的优势
🚀 大幅减少线束:相比域架构,线束长度可减少50%以上,降低整车重量。
🧠 计算集中化:区域控制器具备更强的计算能力,可直接处理本地数据并减少数据流量。
🔒 更高的安全性:区域间数据隔离降低了攻击风险,同时以太网支持更强的加密机制。
区域架构是软件定义汽车(Software Defined Vehicle, SDV)发展的关键,它将使未来汽车具备更强的可扩展性、远程升级能力(OTA)以及智能化的数据管理。
4. 填补带宽空白:CAN XL 与 10Base-T1S
在车载网络演进过程中,一个长期存在的问题是1 Mbit/s 到 100 Mbit/s 之间的带宽空缺。最近,两种新协议正试图填补这一空白:
CAN XL(Controller Area Network eXtra Long)
- 速率:最高 20 Mbit/s
- 兼容性:向下兼容 CAN 和 CAN FD
- 主要用途:动力系统、底盘控制、车身电子、ADAS
10Base-T1S(单对以太网)
- 速率:最高 10 Mbit/s
- 物理层:仅需一对双绞线,支持多节点共享总线
- 主要用途:车身控制、传感器数据传输、ADAS系统
🔍 CAN XL vs. 10Base-T1S
| 特性 | CAN XL | 10Base-T1S |
|---|---|---|
| 速率 | 最高 20 Mbit/s | 最高 10 Mbit/s |
| 拓扑 | 点对点或多节点 | 总线或星型 |
| 兼容性 | 兼容 CAN FD | 以太网生态 |
| 应用场景 | 动力系统、底盘控制 | 车身电子、ADAS |
两者各有优势,未来IVN架构中很可能会同时采用这两种协议,以满足不同的需求。
5. 结论:IVN的未来
随着自动驾驶、电动化、车联网(V2X)技术的发展,车载网络架构正从传统的分布式ECU架构向区域架构演进。同时,CAN XL 和 10Base-T1S等新协议的引入,使得车载网络在带宽、延迟、成本和安全性方面实现了优化。
未来,随着中央计算架构(Centralized Computing Architecture)的普及,IVN 还将进一步演进,形成更智能化、更高效的通信系统。汽车正在从单纯的交通工具,向智能移动终端转变,而车载网络则是这一变革的基石。
🚗💡 你认为未来的车载网络架构会如何发展?欢迎在评论区讨论! 🚗💬


















 103
103

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











