







2019年全国研究生数学建模竞赛华为杯
B题 天文导航中的星图识别
原题再现:
天文导航(Celestial Navigation)是基于天体已知的坐标位置和运动规律,应用观测天体的天文坐标值来确定航行体的空间位置等导航参数。与其他导航技术相比,天文导航是一种自主式导航,不需要地面设备,不受人工或自然形成的电磁场的干扰,不向外界辐射能量,隐蔽性好,而且定姿、定向、定位精度高,定位误差与时间无关,已被广泛用于卫星、航天飞机、远程弹道导弹等航天器。天文导航的若干背景知识可参阅附件1。
星敏感器是实现航行体自主姿态测量的核心部件,是通过观测太空中的恒星来实现高精度姿态测量。恒星是用于天文导航最重要的一类天体。对天文导航而言,恒星可以看成是位于无穷远处的,近似静止不动的,具有一定光谱特性的理想点光源。
借助天球坐标系,可用赤经与赤纬来描述恒星在某一时刻位置信息(相关定义和概念可参考附件1)。恒星在天球球面上的投影点称为恒星的位置。将星空中恒星的相关数据,按不同的需求编制而成的表册,称为星表。星表是星图识别的主要依据,也是姿态确定的基准。常用的星表中通常列有恒星的位置、自行、星等(亮度)、颜色和距离等丰富的信息。对于天文导航而言,感兴趣的信息主要是恒星的位置和星等。附件2提供了一个简易的星表,提供了部分恒星在天球坐标系下的位置(以赤经、赤纬来标记,单位:角度)和星等信息。
全天自主的星图识别是星敏感器技术中的一项关键技术。星图识别是将星敏感器当前视场中的恒星(星图)与导航星库中的参考星进行对应匹配,以完成视场中恒星的识别。星图识别一般包括图像采集及预处理、特征提取、匹配识别等过程。
图像预处理包括去除噪声和星点质心提取。为简化,本赛题暂不考虑具体的去除噪声和质心提取等问题,认为所讨论的星图图像已经完成了图像预处理。
导航数据库一般包括两部分:导航星表和导航星特征数据库。导航星表是从基本星表中挑选一定亮度范围的导航星,利用其位置(赤经、赤纬)和亮度信息编制而成的简易星表。星敏感器除了需要构建导航星表外,还需要按照特征提取算法,构造导航星的特征向量,存储由特征向量构成的导航星特征数据库。
提取出观测星的特征后,就可以寻找特征类似的导航星。如果找到特征惟一接近的导航星,即可认为二者匹配。匹配识别过程和提取特征的方法紧密相关。本赛题暂不考虑后续的航行体定姿定位问题。
在星图识别的相关工作中需要用到天球坐标系、星敏感器坐标系、星敏感器图像坐标系等。其简单定义为:
(1)天球坐标系。以天赤道为基圈,过春分点的时圈为主圈,春分点为主点。天球坐标系采用赤经、赤纬作为坐标量。参见附件1相关叙述。
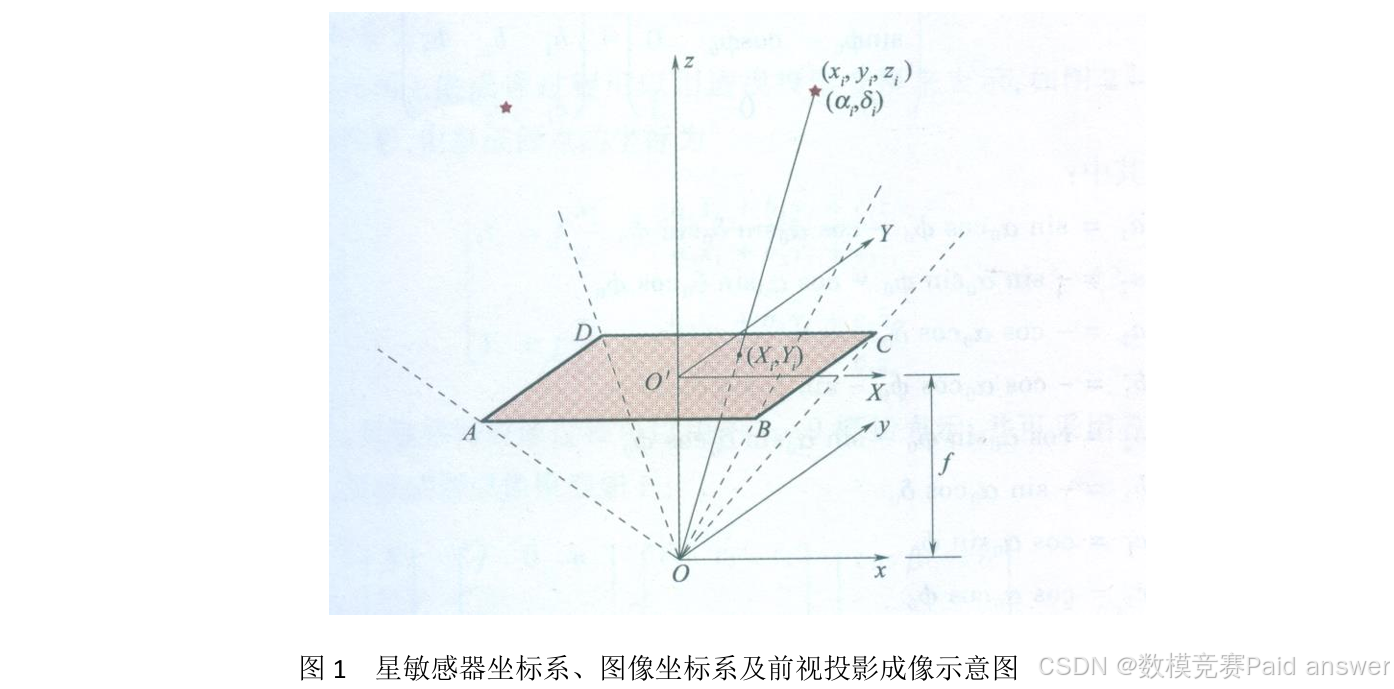
(2)星敏感器坐标系。以投影中心O(光轴上与感光面距离为f的点,即光心,参见图1)为坐标原点,以光轴为z轴(后面的讨论中,光轴 O^‘与天球面的交点记为D点),过O点平行于感光面两边的直线作为x轴和y轴。图1为星敏感器坐标系、图像坐标系及前视投影成像示意图。
(3)图像坐标系。以感光面的中心O^’(O点在该平面上的投影点)为坐标原点,平行于感光面两边的直线为X轴和Y轴的平面坐标系,参见图1。
请你们团队利用附件提供的相关背景材料和数据,建模分析下面问题:
问题1 P_1、P_2、P_3是3颗已知位置的恒星,即它们在天球坐标系下的赤经和赤纬((α_i,δ_i ), i=1,2,3 )已知;Q_1、Q_2、Q_3是来自恒星P_1、P_2、P_3的平行光经过星敏感器光学系统成像在感光面上的星像点质心中心位置(参见图1); 记O^’ Q_1=a_1,O^’ Q_2=a_2,O^’ Q_3=a_3,OO^'=f。
(1)建立由f,a_i,(α_i,δ_i ) (i=1,2,3 )等参数解算D点在天球坐标系的位置信息的数学模型,并给出具体的求解算法;
(2)若不利用f值的信息,试建立由a_i,(α_i,δ_i ) (i=1,2,3 )等参数求解D点在天球坐标系中的位置信息的数学模型,并给出具体的求解算法;
(3)一般来说,星敏感器视场内的恒星数量多于3颗,请讨论如何选择不同几何位置的三颗星,提高解算D点在天球坐标系中的位置信息的精度,并分析相应的误差。
问题2 传统的星图识别方法主要是以角距(即星与星之间的球心角,可直观理解为两颗恒星分别与地心连线之间的夹角)或其衍生的形式为特征,这类方法比较简单,但一般需要较大的存储空间,识别算法实时性不好,且识别率普遍不高。通过对星图中的星点信息进行更为精细的特征提取,构建更高层次的特征,可能会提高星图识别算法的实时性和降低误匹配率。基于附件2提供的简易星表信息,请构建相应的特征提取模型,设计对应的星图识别算法,确定出附件3给出的8幅星图中每一个星像点所对应的恒星编号(对应附件2简易星表的恒星编号),并对算法的性能进行评估。
附件1 相关背景知识(含对附件2、附件3的说明,请注意!)
附件2 简易星表
附件3 8幅星图相关数据
整体求解过程概述(摘要)
本文以导航恒星的几何关系为基础,研究了根据导航恒星天球坐标解算测者天球坐标的问题,以及三星观测定位模型非线性方程组的解析解法和数值解法,并对三星观测定位误差与导航恒星排布之间的关系进行了理论推证和仿真分析。同时针对星图识别问题,以角距及其衍生特征为基础,研究并设计了三种星图识别特征,并实现了对题给星图数据的识别。
针对问题一中第(1)问,利用了天球坐标与空间直角坐标的转换关系、空间三角形几何关系与向量夹角的计算方法,构造了三元超定方程组;利用变量代换、线性代数和空间解析几何知识,提出了此类三元超定方程组的三种不同解析解法,给出了每种解法的不同几何含义和具体的解,并在解法三中创新地提出了考虑参数依赖时方程的解法。
针对问题一中第(2)问,在第(1)问的基础上构造了三元非线性方程组,由于得到解析解非常困难,团队主要采用了基于最小二乘法和牛顿迭代法的数值解法,推导图像坐标系星像点与天球坐标系利用第二问答案数据采用相应方法给出了几组例解。
针对问题一中第(3)问,根据天文导航误差传播理论进行推导,得出了“恒星四面体体积越大,定位精度越高”的理论结果,考虑到实际视场宽度问题,探索了星像点在感光胶片的分布与定位精度的关系,确定在三星观测定位时,应当使得3颗导航恒星尽量位于视场边界,且呈正三角形排布的选星方式受误差影响最小,并采用蒙特卡洛仿真试验验证了结果。
针对问题二,首先采用角距匹配思想,构建恒星夹角正弦数据库,并依据视场界限进行筛选,缩小了搜索空间。并通过编程实现了基于角距特征的星图识别;构建了邻接星数据库,建立了基于角距和特征的星图识别模型;在第一题(2)问提出的感光面投影到天球坐标系的思想方法的基础上,利用邻接星数据库,提出了一种非角距衍生的星图识别特征——恒星线交角特征。然后对上述判据带入星图进行判断,给出了匹配结果和匹配计算量,对各种算法的适用条件和优缺点进行了全面的分析,并给出了最终结果。
模型假设:
假设 1 由于地球半径的尺度相比于导航恒星的对地距离可以忽略不计,故将地球视为一个点,并以地心代表地球进行计算和处理。
假设 2 本文所处的观测条件,是不考虑星云尘埃、云团遮挡、光的折反射等情况的理想条件。
假设 3 关于星敏感器本身所产生的观测误差,本文认为相对于观测角而言属于小角度误差,即在测角误差为∆α时,有sin𝛥𝛼≈tan𝛥𝛼≈𝛥𝛼.
假设4 不考虑观测过程中导航恒星相对天球坐标系的位置变化。
假设5 图像坐标系与星敏感器所在载体坐标系重合。
问题分析(部分):
实现在天球坐标系下的三星观测定位,实际是求解星敏感器的
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1899
1899

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









