









 本文详细介绍了控制系统稳定性的概念,包括内稳定性、BIBO稳定性和李雅普诺夫稳定性。讨论了状态反馈和状态观测器在系统稳定中的作用,以及如何利用李雅普诺夫函数判断系统稳定性。此外,还阐述了H2和H无穷范数在信号和系统性能评估中的应用,并探讨了鲁棒控制问题,特别是H无穷控制标准问题的频域和时域解法。最后,提到了MATLAB工具箱在H无穷设计中的应用。
本文详细介绍了控制系统稳定性的概念,包括内稳定性、BIBO稳定性和李雅普诺夫稳定性。讨论了状态反馈和状态观测器在系统稳定中的作用,以及如何利用李雅普诺夫函数判断系统稳定性。此外,还阐述了H2和H无穷范数在信号和系统性能评估中的应用,并探讨了鲁棒控制问题,特别是H无穷控制标准问题的频域和时域解法。最后,提到了MATLAB工具箱在H无穷设计中的应用。

来财来
Why 不建议研究 H∞ 控制?
经过综合考虑,对于无人机这种系统,要求响应快速,抗干扰能力要求高,不推荐使用鲁棒H∞ 控制控制。
原因有以下几点,纯属本人的个人看法:
- 鲁棒性能势必要牺牲其他性能,如快速性,快速性是无人机系统中的重点;
- 鲁棒控制器是一种高阶的输出反馈控制器,不易于实现;
- 推荐使用模型预测控制,使用在线辨识的方式辨识出系统模型。
Why 鲁棒控制?
- 系统普遍具有不确定性,包括结构不确定性和参数不确定性。例如:数学模型和参数的不确定性、外干扰的多样性和复杂性、系统结构和参数的未知变化等。
- 解决这类模型不确定系统的稳定性和有效控制问题属于鲁棒控制问题。
Why H∞?
(1)系统的H∞范数代表系统在所有频率上对输入信号的最大放大倍数,反映系统对外部干扰的敏感程度。H∞范数越小,系统对高频噪声的抑制能力越强,鲁棒性越好。通过极小化系统传递函数的H∞范数(即频率响应的峰值增益),抑制最坏情况下的干扰影响。
(2)最小化闭环系统的灵敏度函数可以减小模型不确定对闭环系统性能指标的影响。
对于下面这种负反馈闭环系统:



What 鲁棒控制
鲁棒控制研究的问题:
-
如何用数学工具描述不确定系统?
-
如何保证系统的鲁棒稳定系?
-
如何保证系统的鲁棒性能?
- 动态性能:时域如上升时间、超调、调节时间;频率如稳定裕度、截止频率、奇异值等;
- 静态性能:静态误差;
-
如何将具体问题转换为H∞ 标准问题?
常见的具体问题如:- 干扰抑制问题
- 跟踪问题
- 鲁棒稳定问题
-
为什么要将具体问题转换为 H∞ 标准问题?
为了方便将具体问题的求解转换为求解系统的 H∞ 范数。 -
H∞ 标准问题:

-
如何求解H∞ 标准问题?
- Riccati 法
- DGKF法
- Lmi 法
How to get H∞ controller
目标:求解一个状态反馈矩阵
K
K
K或输出传递函数矩阵
K
(
s
)
K(s)
K(s)使得w到z的闭环传递函数的H∞范数最小(或小于1、小于某个值),即:
∥
T
w
→
z
∥
∞
=
sup
ω
σ
max
(
T
w
→
z
(
j
ω
)
)
\|T_{w \to z}\|_\infty = \sup_{\omega} \sigma_{\text{max}} \left( T_{w \to z}(j\omega) \right)
∥Tw→z∥∞=ωsupσmax(Tw→z(jω))
求解
K
K
K的方式主要有:
(1)频域法:
- 传递函数矩阵法
(2)时域法:
- Riccati 法
- Lmi 法
衍生为H∞ 标准控制问题
1. 知识储备
一些概念
什么是定理
经过严谨的数学推导二确定的道理、公式、真理。
关键词
H∞ 控制
线性矩阵不等式LMI
传递函数矩阵
DGKF公式
μ综合
混合灵敏度
结构奇异值
参数摄动、未建模动态
Riccati方程
H∞标准控制问题
不确定模型的数学描述方法
小增益定理
MATLAB、Python鲁棒控制工具箱
内稳定
内稳定指系统的所有内部状态(状态变量)在无外部输入时(零输入条件下),随时间推移会收敛到零或保持有界。
趋向零:渐近稳定
趋向有界:稳定
外稳定、BIBO稳定
对于任何有界输入信号,系统的输出信号也是有界的。
有界输入,有界输出。
镇定
对于一个控制系统,如果可以通过某种反馈使系统实现渐近稳定(闭环系统极点具有负实部),则称该系统是能被镇定的。
稳定不代表没有静态误差
系统的不确定性
不确定性分为结构不确定性和参数不确定性;
主要包括数学模型和参数的不确定性、外干扰的多样性和复杂性、系统结构和参数的未知变化等;
解决这类模型不确定系统的稳定性和有效控制问题属于鲁棒控制问题。
状态反馈
将系统的每一个状态变量乘以相应的反馈系数后,馈送到系统的输入端与参考输入相加,将相加和作为受控系统的输入。如图5.1.1是状态反馈系统的结构图,其中反馈增益矩阵为K。

状态观测器
要实现状态反馈,就离不开对状态变量的测量。但是在实际系统中,并不是所有的状态变量物理上都能够直接测量得到,有些状态变量通过传感器根本无法测量。在这种情况下,就需要从系统的已知信息,如输入u和输出y,来估计这些不可测量的状态变量。这种估计状态的方法称为状态观测或状态重构,而估计状态的装置在确定性系统中称为状态观测器,简称观测器。观测器是一个物理可实现的模拟动力学系统,通过可直接测量的输入和输出信息来进行状态估计。如果原系统有n个状态变量,且这n个状态变量都需要进行估计,则观测器的维数和原系统的维数相同,这种观测器称为全维状态观测器。如果这n个状态变量中有m个状态可以通过直接测量得到,那么只需要设计n-m维观测器,来估计n一m个状态变量即可,这种观测器称为降维观测器。如果降维观测器阶数是最小的,则称该观测器为最小维观测器。
稳定性判据
SISO系统(线性定常):劳斯判据、赫尔维茨判据、闭环系统所有极点具有负实部;
MIMO系统(线性系统、非线性系统、定常系统和时变系统):李雅普诺夫第一法和李雅普诺夫第二法。
信号的 2 范数
衡量信号能量。
信号的 ∞ 范数
衡量信号在时域上的最大幅值,反映信号的瞬时最大能量,避免设备饱和或过载。
系统的 H2 范数
系统的H2范数衡量系统在输入为白噪声时的稳态输出方差,反映系统对输入信号的放大程度。
系统的 H∞ 范数
系统的H∞范数代表系统在所有频率上对输入信号的最大放大倍数,反映系统对外部干扰的敏感程度。H∞范数越小,系统对高频噪声的抑制能力越强,鲁棒性越好。H∞ 范数可以描述有限输入能量到有限输出能量的最大增益。

矩阵正定、矩阵大于零
A
>
0
A>0
A>0,即二次型大于零。
在控制理论中,矩阵“大于零”与“正定”之间的关系及区别如下:
正定矩阵:对称矩阵
A
A
A若满足对任意非零向量
x
x
x,均有
x
T
A
x
>
0
x^T A x > 0
xTAx>0,则称
A
A
A为正定矩阵。
这一性质与矩阵的特征值全为正。
良定性
在模型不确定性或外部干扰时闭环系统任满足以下两点:
- 内部稳定性:系统状态矩阵的所有特征值位于左半平面(连续系统)或单位圆内(离散系统),即系统状态不会发散。
- 输入输出适定性:对于任意合理的输入信号,系统输出存在且唯一,不会出现无穷大增益或不可控的响应。
L2空间
能量有界信号的集合。
充分条件、必要条件、充要条件、当且仅当
- 充分条件
A 是 B 的充分条件:A成立B一定成立,A ⇒ B。 - 必要条件
A 是 B 的必要条件:B成立A一定成立,B ⇒ A。 - 充要条件
A 是 B 的充要条件:A ⇔ B - 当且仅当
与充要条件同
重要关系
抑制干扰 –> 最小化能量增益 -> 最小化系统的无穷范数问题、小增益定理系统稳定的充要条件、鲁棒性能和鲁棒稳定性。
干扰信号举例
以无人机的姿态模型为例:

参考信号、期望信号
在鲁棒控制中 ,通常会把参考信号当做扰动处理?
H∞ 控制和 μ \mu μ综合分别用于处理什么问题?
- H∞ 控制用于处理非结构不确定性;
- μ \mu μ综合用于处理结构不确定性;
- 非结构不确定性通常表现为未建模动态,结构不确定性通常表现为模型的参数摄动。因此,在鲁棒控制中,非结构不确定性要比结构不确定性要更受重视!
某函数在某半平面内解析
例如:F(s)在复右半平面内解析。
复数s取值在复右半平面;
解析:函数的解析性指函数在该自变量的取值范围内处处可导(可以展开为收敛的泰勒级数)。
2. H∞ 控制理论综述
2.1 历史、发展、现状


2.2 DeepSeek:简单介绍一下H∞ 控制理论的历史、发展和现状
H∞控制理论(H-infinity control theory)是现代控制理论中鲁棒控制的核心分支,旨在设计对系统不确定性(如建模误差、外部干扰)具有强鲁棒性的控制器。其发展历程与工程需求紧密相关,以下是其历史、发展及现状的概述:
一、历史背景(1970s–1980s)
-
起源:
H∞控制理论诞生于20世纪70年代末至80年代初,主要为了解决经典控制方法(如PID、LQG)在鲁棒性上的不足。传统方法难以处理复杂系统中的模型不确定性和高频干扰。 -
奠基性工作:
- George Zames(1981):首次提出基于频域优化的H∞控制思想,通过极小化系统传递函数的H∞范数(即频率响应的峰值增益),抑制最坏情况下的干扰影响。
- 英国与加拿大研究团队:Doyle、Glover、Khargonekar和Francis等人将H∞问题转化为状态空间框架下的优化问题,提出了基于Riccati方程的求解方法(1988–1989)。
二、理论发展与成熟(1990s–2000s)
-
状态空间方法的突破:
- 1990年代,Doyle等人提出H∞标准问题的解析解法(如DGKF公式),建立了H∞控制与线性矩阵不等式(LMI)的联系。
- μ综合(μ-Synthesis):针对结构不确定性(如参数摄动、未建模动态),结合H∞优化与结构奇异值(μ-analysis),进一步提升了鲁棒性。
-
应用扩展:
- 从最初的航空航天领域(如飞行器控制)扩展到机械系统、电力电子、机器人、汽车悬架等。
- 在工业实践中,H∞控制被用于高精度跟踪、振动抑制和噪声衰减。
三、现状与前沿方向(2010s–至今)
-
理论成熟与工具化:
- H∞控制已成为鲁棒控制的标准工具,集成在MATLAB、Python控制库等软件中。
- 计算效率提升:基于凸优化(如半定规划)的求解方法降低了计算复杂度。
-
与其他控制方法的融合:
- 数据驱动H∞控制:结合机器学习与H∞框架,直接从数据中学习控制器。
- 非线性H∞控制:针对非线性系统(如无人机、柔性机械臂),推广H∞理论至Hamilton-Jacobi方程。
- 网络化控制系统:在通信受限(如时延、丢包)下设计分布式H∞控制器。
-
新兴应用领域:
- 量子控制:调控量子系统的鲁棒性。
- 生物医学工程:如人工胰腺的血糖控制。
- 智能电网与可再生能源:提升电力系统的抗干扰能力。
四、H∞控制的核心思想
- 目标:最小化系统从干扰输入到输出响应的最大增益(H∞范数),即:
∥ T w → z ∥ ∞ = sup ω σ max ( T w → z ( j ω ) ) \|T_{w \to z}\|_\infty = \sup_{\omega} \sigma_{\text{max}} \left( T_{w \to z}(j\omega) \right) ∥Tw→z∥∞=ωsupσmax(Tw→z(jω))
其中 T w → z T_{w \to z} Tw→z为干扰到输出的传递函数, σ max \sigma_{\text{max}} σmax表示最大奇异值。 - 特点:
- 通过优化最坏情况性能,确保系统在不确定性下稳定。
- 能够显式处理频域特性(如高频噪声抑制)。
五、对比其他控制方法
| 方法 | 特点 |
|---|---|
| 经典PID | 简单易用,但对模型误差敏感,鲁棒性差。 |
| LQG | 优化随机干扰下的性能,但无法保证确定性干扰下的鲁棒性。 |
| H∞控制 | 针对最坏情况设计,鲁棒性强,适合高精度与强抗扰需求。 |
| 滑模控制 | 对参数摄动鲁棒,但存在高频抖振问题。 |
六、总结
- 历史地位:H∞控制是控制理论从经典频域方法向现代鲁棒控制过渡的里程碑。
- 现状:理论成熟且工具化,应用广泛但仍面临非线性、大规模系统优化的挑战。
- 未来方向:与人工智能、量子控制等交叉融合,推动自适应鲁棒控制的发展。
3. 频域设计方法
George Zames(1981):首次提出基于频域优化的H∞控制思想,通过极小化系统传递函数的H∞范数(即频率响应的峰值增益),抑制最坏情况下的干扰影响。
参考资料:

3.1 鲁棒控制理论分为两个部分
(1)鲁棒性分析
根据给定的标称系统和不确定性集合,找出保证系统鲁棒性所需的条件。
(2)鲁棒性综合
鲁棒性综合(鲁棒控制器设计问题)就是根据给定的标称模型和不确定性集合,基于鲁棒性分析得到的结果来设计一个控制器,使得闭环系统满足期望的性能要求。
3.2 灵敏度函数



3.3 H∞ 控制问题
接上小节的PPT…

3.4 传递函数的H∞范数
记住定理即可,推导暂时别管。

3.5 输出反馈闭环系统的鲁棒稳定性分析
3.5.1 加性不确定系统
下图中的定理根据小增益定理推导得到。

3.5.2 乘性不确定系统
下图中的定理根据小增益定理推导得到。

3.6 小增益定理
小增益定理是经过推导得到的定理(结论),记住便可,证明和推导过程这里不赘述,请参考其他资料。
小增益定理在鲁棒控制理论分析和设计中经常用到!是用于判断不确定系鲁棒稳定性的重要判据!
解释1:
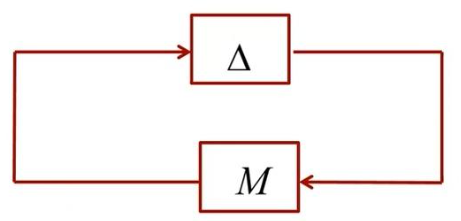
假设
M
(
s
)
M(s)
M(s)是稳定的;
那么:
闭环系统对所有稳定的
Δ
(
s
)
\Delta(s)
Δ(s) 都是良定且内稳定的
⟺
\Longleftrightarrow
⟺
∣
∣
M
(
s
)
Δ
(
s
)
∣
∣
∞
<
1
\bigm\vert\bigm\vert M(s)\Delta(s) \bigm\vert\bigm\vert_\infty<1
M(s)Δ(s)
∞<1。
其中,
∣
∣
M
(
s
)
Δ
(
s
)
∣
∣
∞
<
1
\bigm\vert\bigm\vert M(s)\Delta(s) \bigm\vert\bigm\vert_\infty<1
M(s)Δ(s)
∞<1 被称为小增益条件。
解释3:如果系统的回路传递函数的范数小于1,则闭环系统将总是稳定的。

4. 时域设计方法
- Riccati 法
- Lmi 法
4.1 Riccati 法
理论已成熟。
通过求解Riccati方程得到H∞控制器。
Doyle、Glover、Khargonekar和Francis等人将H∞问题转化为状态空间框架下的优化问题,提出了基于Riccati方程的求解方法(1988–1989)。
包括以下几种设计方法:
- 状态反馈控制:静态状态反馈增益矩阵的设计。
- 输出反馈控制:输出反馈补偿器的设计。
- 基于状态观测器的状态反馈控制:状态观测器的设计与静态状态反馈增益矩阵的设计。
4.2 LMI 法(H∞标准问题、DGKF公式)
几年来热门。
1990年代,Doyle等人提出H∞标准问题的解析解法(如DGKF公式),建立了H∞控制与线性矩阵不等式(LMI)的联系。
详细介绍见第5节。
4.3 μ综合
μ综合(μ-Synthesis):针对结构不确定性(如参数摄动、未建模动态),结合H∞优化与结构奇异值(μ-analysis),进一步提升了鲁棒性。
5. H∞ 标准问题

5.1 具体问题的分类
- 干扰抑制问题
- 跟踪问题
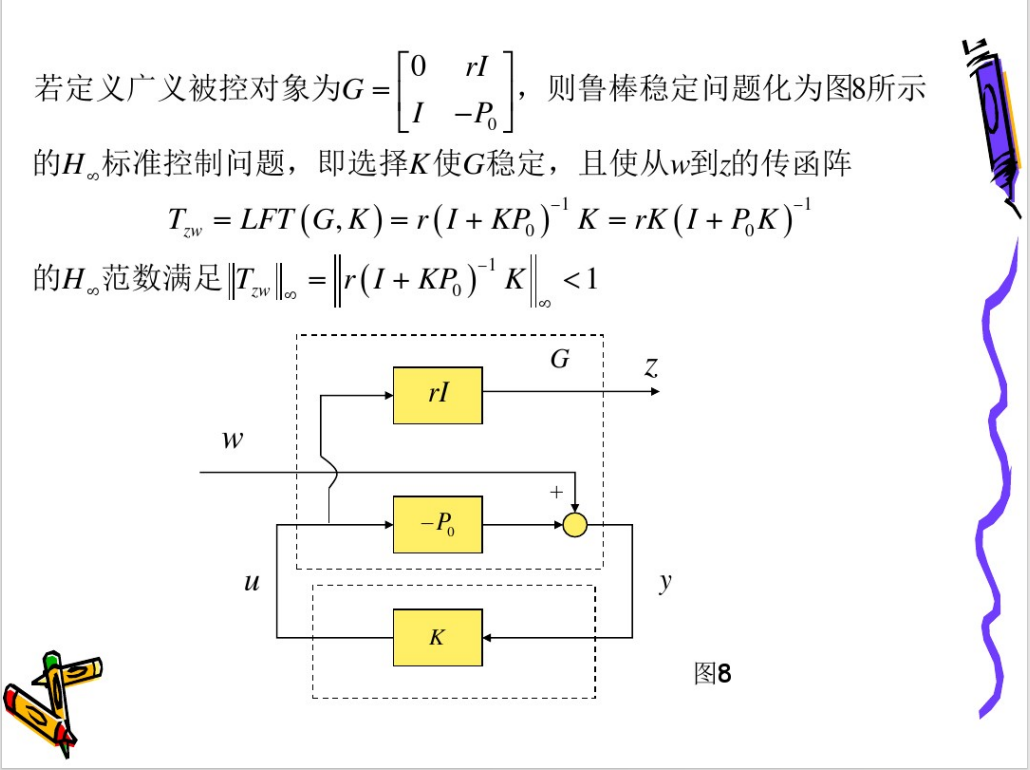
- 鲁棒稳定问题
如何将具体问题转换为H∞ 标准问题?
5.2 分析方式
- 频域中的H无穷标准控制问题(传递函数矩阵)
- 时域中的H无穷标准控制问题(广义系统的状态空间表达式)
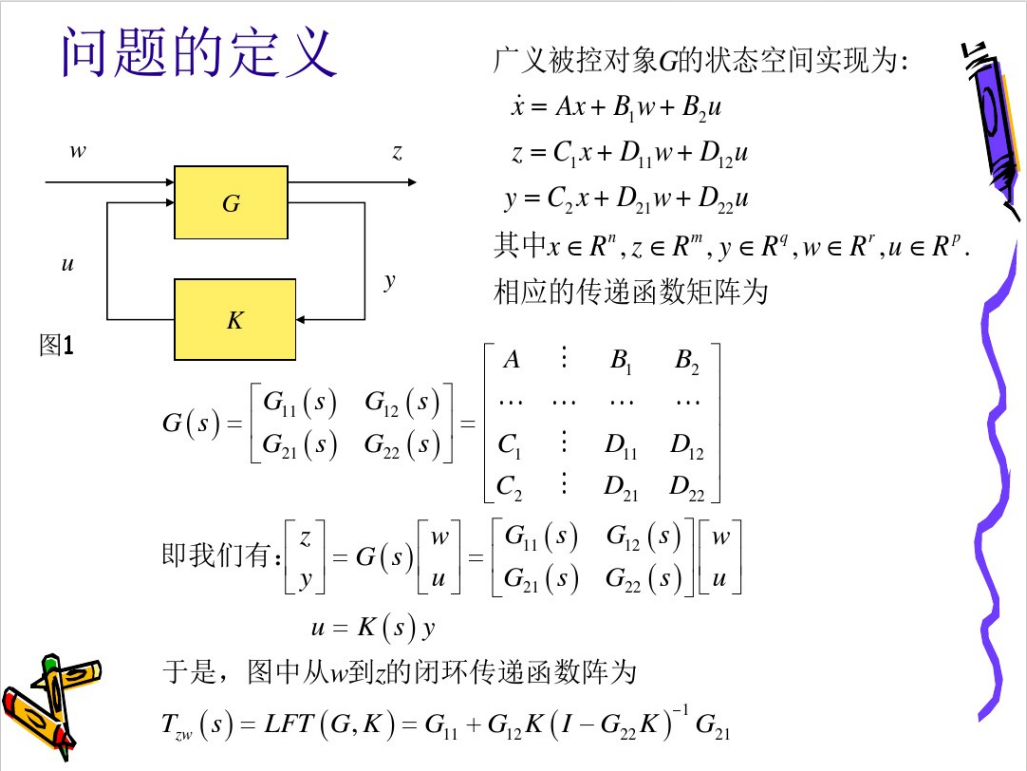
5.3 物理量说明



其中:
Gp:广义被控对象;
K(s):控制器;
w:扰动输入,可以是真实信号(如噪声)也可以是虚拟信号(如期望值);
u:控制输入;
y:测量输出;
z:性能输出(评价信号),可以是真是信号也可以是虚拟信号;
w到z的传递函数记为:F( Gp(s) , K(s) ) = z(s)/w(s)
H无穷标准控制问题是,寻找渐进稳定的K或K(s)使
最优问题 ==gama0
次优问题 <gama
标准问题 <1
在H无穷控制问题中,系统的性能指标用系统闭环传递函数矩阵的H无穷范数来表示。在状态空间描述的系统中,要想求解H无穷控制问题,就必须建立状态空间参数矩阵与传递函数矩阵的H∞ 范数之间的关系,建立这种关系是研究时域中的H∞ 控制问题的一个关键。为此,首先研究Hamiltonia 矩阵与Riccati方程之间的关系,然后研究传递阵的H无穷范数。
传递函数矩阵:范数最小(基于频域)
状态空间参数矩阵:(基于时域,状态空间,可用黎卡提,LMI,)
5.4 频域法



称
F
(
G
p
,
K
)
F(Gp , K)
F(Gp,K) 为
G
p
、
K
G_p、K
Gp、K的下线性分式变换(lower fractional transformation)。
5.5 时域法



5.6 条件








注意:图中w3附近的节点的某些箭头方向标错啦!
5.7 计算机辅助设计
-
matlab工具箱、函数
Hinf hinfopt hinfsyn hinfric hinflmi mixsyn mksys branch ltisys ss ssdata -
MATLAB鲁棒控制工具箱
Matlab提供了很多H无穷设计函数,与H无穷设计相关的几个重要的工具箱有:
Control System Toolbox;
mu-Analysis and Synthesis Toolbox(mu-tools);
Robust Control Toolbox(RCT);
LMI Control Toolbox。
Matlab7.0之后的版本中,LMI和mu-tools都包含在RCTv3.0.1中,Matlab7.0之前的版本中这些工具箱是独立的。 -
工具箱函数
Control System Toolbox: ss tf zpk
Mu-tools : pck,nd2sys,zp2sys mksys和tree
Mu-tools提供了一种与Control System Toolbox 不一样的表达方式:系统矩阵(system matrix)。Control System Toolbox里面可以写成Gcst=ss(A,B,C,D),对mu-tools则不适用。 -
G 的实现
也可以用mksys和tree等方法。需要注意的是,Mu-tools提供了一种与Control System Toolbox 不一样的表达方式:系统矩阵(system matrix)。Control System Toolbox 里面可以写成Gcst=ss(A,B,C,D),对mu-tools则不适用。
Mt-toos:[A,B,C,D]=ssdata(Gcst);Gmu=pck(A,B,C,D).
[A,B,C,D]=unpck(Gmu);Gcst=ss(A,B,C,D). -
P的实现
…
5.8 经典文献
DGKF
LMI
DeepSeek
5.9 疑问
(1)什么时候才能用状态反馈?什么情况下用输出反馈而用不了状态反馈?
(2)
在dx=Ax+Bu中
Y=Cx+Du,一般D为0,如何取C的值已确保每一个yi都能同时镇定?能同时镇定所有yi的条件是什么?
因此,在直升机省偏子系统中x=[w, psi, r , a0, a1, b1 ],将意味着不能将psi和r同时作为输出,因为没有任何一个控制器能同时镇定psi和r,可能的原因是他们是积分的关系,具体C应该怎么取值能让所有yi同时镇定,条件是?

控制器的位置为何选择1、3 而不选择2或2、3 ??
(3)如何将新问题或不标准问题转化为标准鲁棒控制问题?
(4)标准鲁棒控制问题的框图,广义对象的传递函数矩阵、动态方程阵?
(5)基于MIMO系统的标准鲁棒控制框图的画法?
6. 应用案例
6.1 混合灵敏度设计



6.2 干扰抑制问题


6.3 跟踪问题



举个栗子:

6.4 鲁棒稳定问题



7. 补充资料
















8. 华中科技大学《鲁棒控制理论》PPT
参考资料:

















待续…
9. 中南大学《鲁棒控制理论及应用@吴敏》PPT
目录:

基本的反馈控制系统结构图:

基于模型的控制系统设计方法:
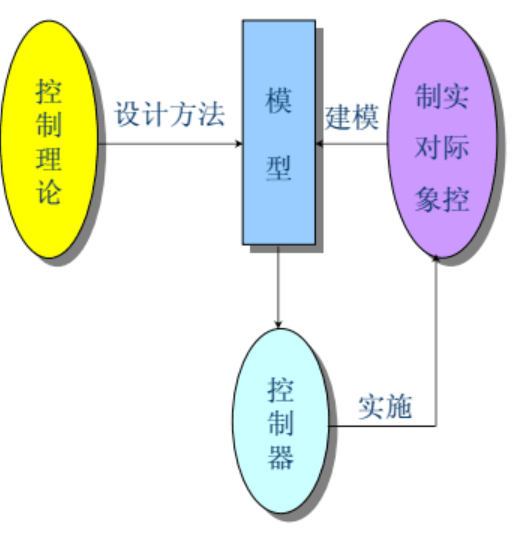
需要考虑的不确定性:
建模时的模型误差
控制系统本身和外部的扰动
控制系统设计的基本要求:

动态性能:超调、上升时间、调节时间、频域指标?
静态特性:静态误差
鲁棒性:鲁棒稳定性、鲁棒动态性、鲁棒静态性。
反馈控制理论的发展阶段:

鲁棒控制研究的基本问题:
到底在研究什么?
(1)不确定系统的数学描述方法;
如何将具体问题用数学工具描述?如何将不确定性用数学描述?如何建立数学关系式?
(2)鲁棒性分析和设计方法;
有哪些分析工具?借助哪些定理?要分析那些性能?如何设计控制器?步骤?计算机辅助工具?
(3)鲁棒控制的应用领域。
有哪些应用?有哪些限制条件?
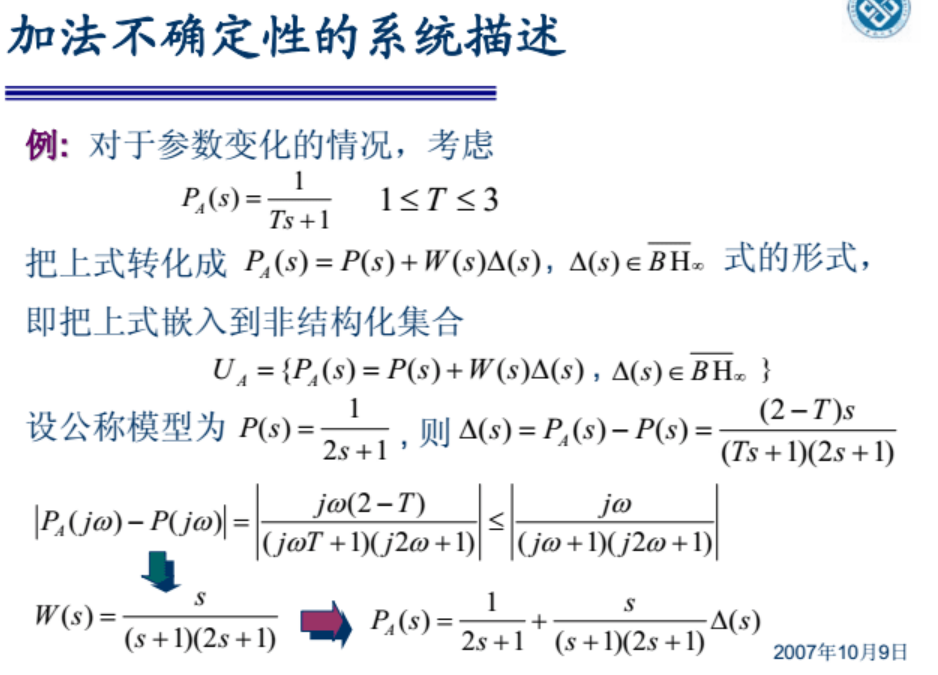
模型的不确定性描述
公称模型、摄动最大值、结构不确定性、非结构不确定性


H∞ 标准问题
灵敏度函数、补灵敏度函数、关系
以误差负反馈控制结构为例:




系统 H∞ 范数的物理意义
系统 H∞ 范数的计算步骤


控制系统的稳定性
适用于SISO、MIMO。
稳定的定义
- 内稳定
解释1:闭环系统所有状态变量都收敛到0或有界。
解释2:闭环系统所有极点具有负实部。
解释3:闭环系统A矩阵所有特征根具有负实部。 - 外稳定
解释1:闭环系统输入输出稳定。
解释2:有界输入有界输出。
结论
对于一个闭环系统而言:
(1)外稳不一定内稳,但内稳一定外稳。
(2)假设开环系统能控且能观测,那么:闭环系统内稳
⟺
\Longleftrightarrow
⟺ 闭环系统外稳。
输出负反馈闭环系统的内稳条件、稳定化控制器
分析
根据上一小节可知,对于一个闭环系统,外稳不一定内稳。
那么闭环系统在外稳的前提下,内稳条件到底是什么?跟什么有关?充要条件是什么?
以误差负反馈控制结构为例作分析。
为了知道 “为什么外稳不一定内稳”,在系统输入通道引入一个扰动信号
v
v
v:

假设:

那么闭环系统的传递函数为:

闭环系统仅有一个极点 -3 ,可知闭环系统外稳定!
但是由于开环传递函数P(s)优一个极点 1 是不稳定的,因此闭环系统一定内不稳!
也就是说此时闭环系统外稳内不稳!
why?
计算
v
v
v到
y
y
y的传递函数:

可知此时
v
v
v到
y
y
y的传递函数
T
y
v
(
s
)
T_{yv}(s)
Tyv(s)竟然是不稳定的!
也就是说,设计的这个控制器
C
(
s
)
=
s
−
1
s
+
2
C(s)=\frac{s-1}{s+2}
C(s)=s+2s−1并不能抑制扰动对输出y的影响。
这就是导致闭环系统外稳内不稳的真凶!
另一种解释是控制器
C
(
s
)
=
s
−
1
s
+
2
C(s)=\frac{s-1}{s+2}
C(s)=s+2s−1的零点
(
s
−
1
)
(s-1)
(s−1)抵消了开环系统
P
(
s
)
=
1
s
−
1
P(s)=\frac{1}{s-1}
P(s)=s−11的不稳定极点
(
s
−
1
)
(s-1)
(s−1),导致闭环系统看起来像仅有一个稳定的极点-3。
那么在设计控制器
C
(
s
)
C(s)
C(s)时需要添加哪些约束条件才能保证闭环系统内稳定呢?

结论
对于以下这种 控制结构:

闭环系统内稳的充要条件是:

状态反馈 u = F x u=Fx u=Fx闭环系统的内稳充要条件
(2)对于
u
=
F
x
u=Fx
u=Fx的状态负反馈控制结构,闭环系统内稳定的充要条件是:

开环系统的可观测条件

一些定理和结论
待续…
为什么要引入结构不确定性?
非结构不确定性通常表现为未建模动态,结构不确定性通常表现为模型的参数摄动。因此,在鲁棒控制中,非结构不确定性要比结构不确定性要更受重视!

加法、乘法不确定性:

规范化系统不确定性的数学描述:

在实际问题中,如何取这个 W ( s ) W(s) W(s)???


举例:
标准H∞ 控制问题

什么是K稳定化G,请参看前面的“稳定化控制器”小节。
后续的太公式太多太复杂了,牙口不好嚼不动了,待续…


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









