






这是KUKA机器人所展示的输入输出的状态
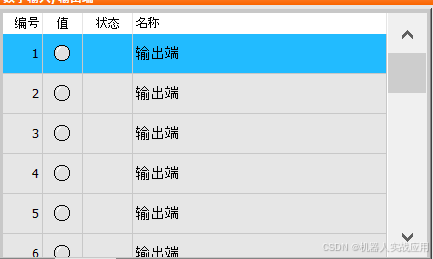
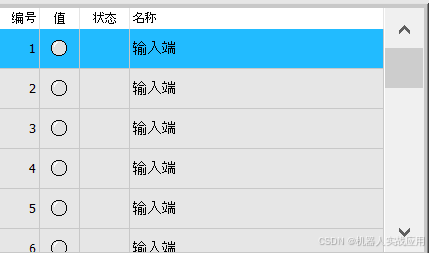
或者是程序显示这种
但是如何做到像ABB这种呢,可以定义自己所需要的名称呢?
***************************************正文开始了******************************************************
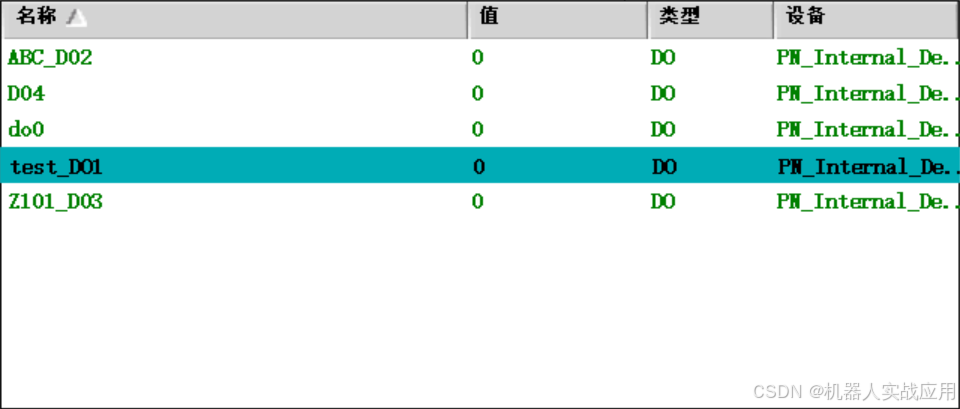
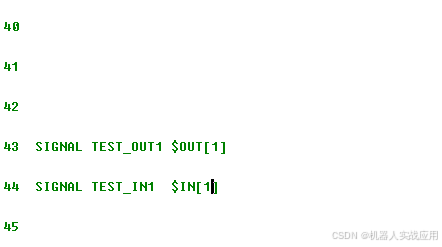
1.首先需要在“system”的文件夹中,在"$config" 文件中的 "USER GLOBALS" 的目录下定义信号名称和所需要的信号编号(在此只做演示,不一一列举)
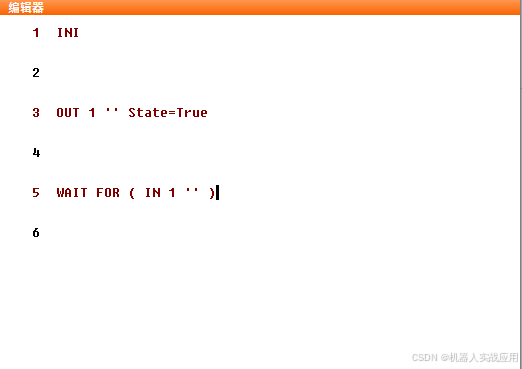
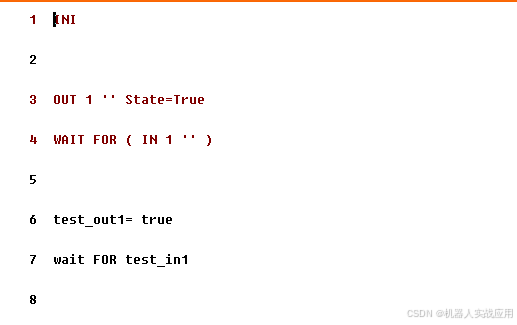
2.在程序中和之前使用方式略有不同,实现的结果是一致



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









