







 本教程第一章深入介绍了Pepper机器人硬件,包括感应器设备、胸前的Android显示屏及其参数,以及Robot ID的位置。了解这些基础知识对于进行App开发至关重要。
本教程第一章深入介绍了Pepper机器人硬件,包括感应器设备、胸前的Android显示屏及其参数,以及Robot ID的位置。了解这些基础知识对于进行App开发至关重要。
第一章 Pepper的硬件介绍
首先让我们确认Pepper的硬件设备。
请大家在了解Pepper的硬件设备之后再开始App的开发。
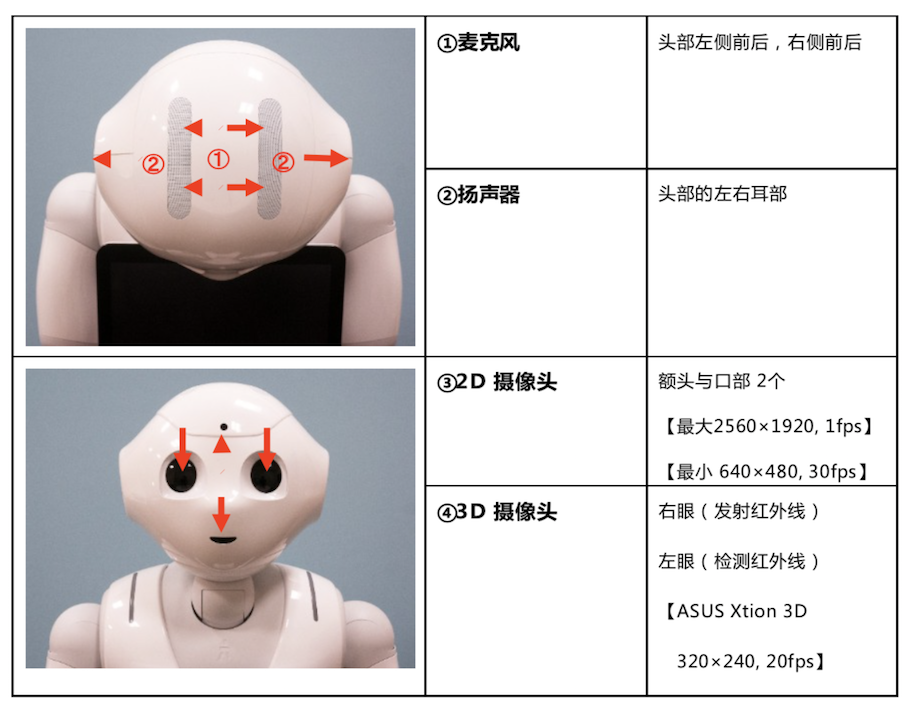
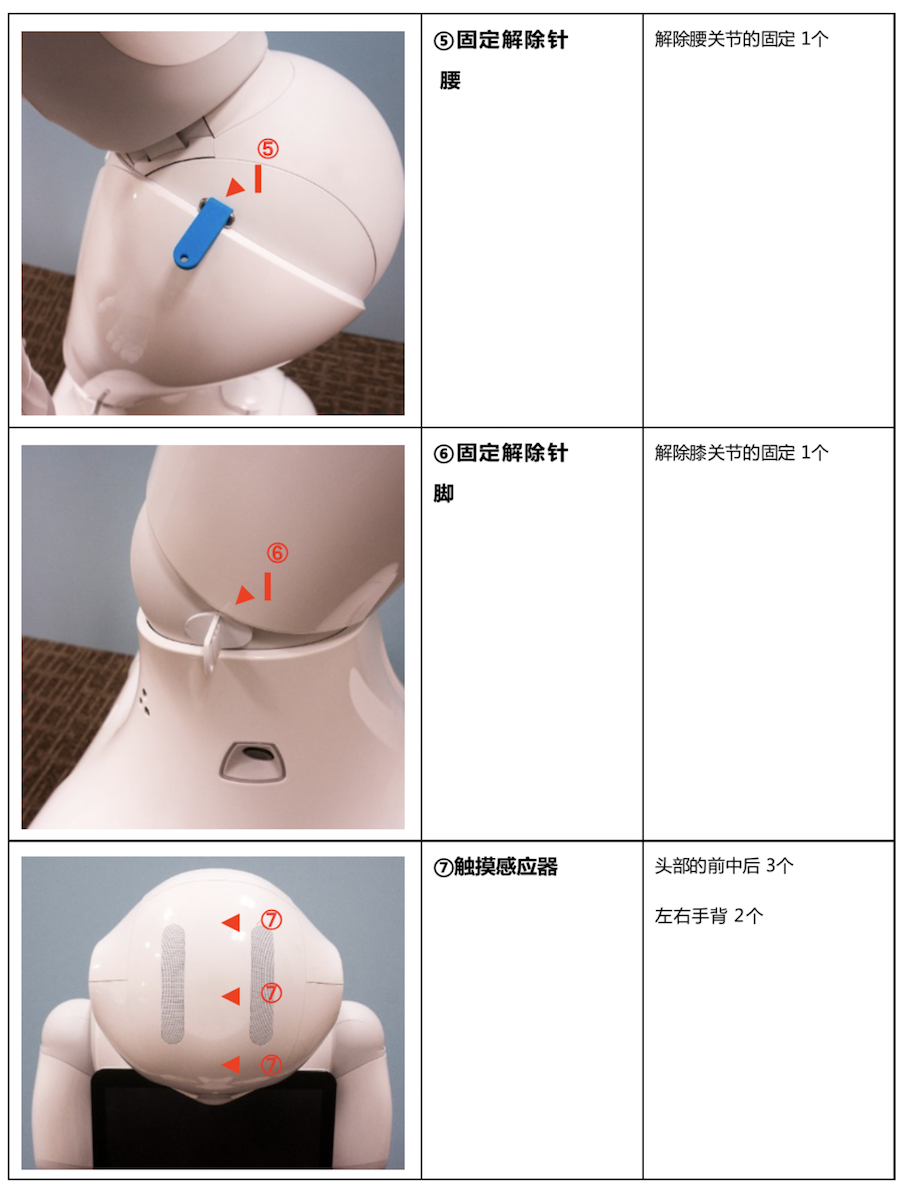
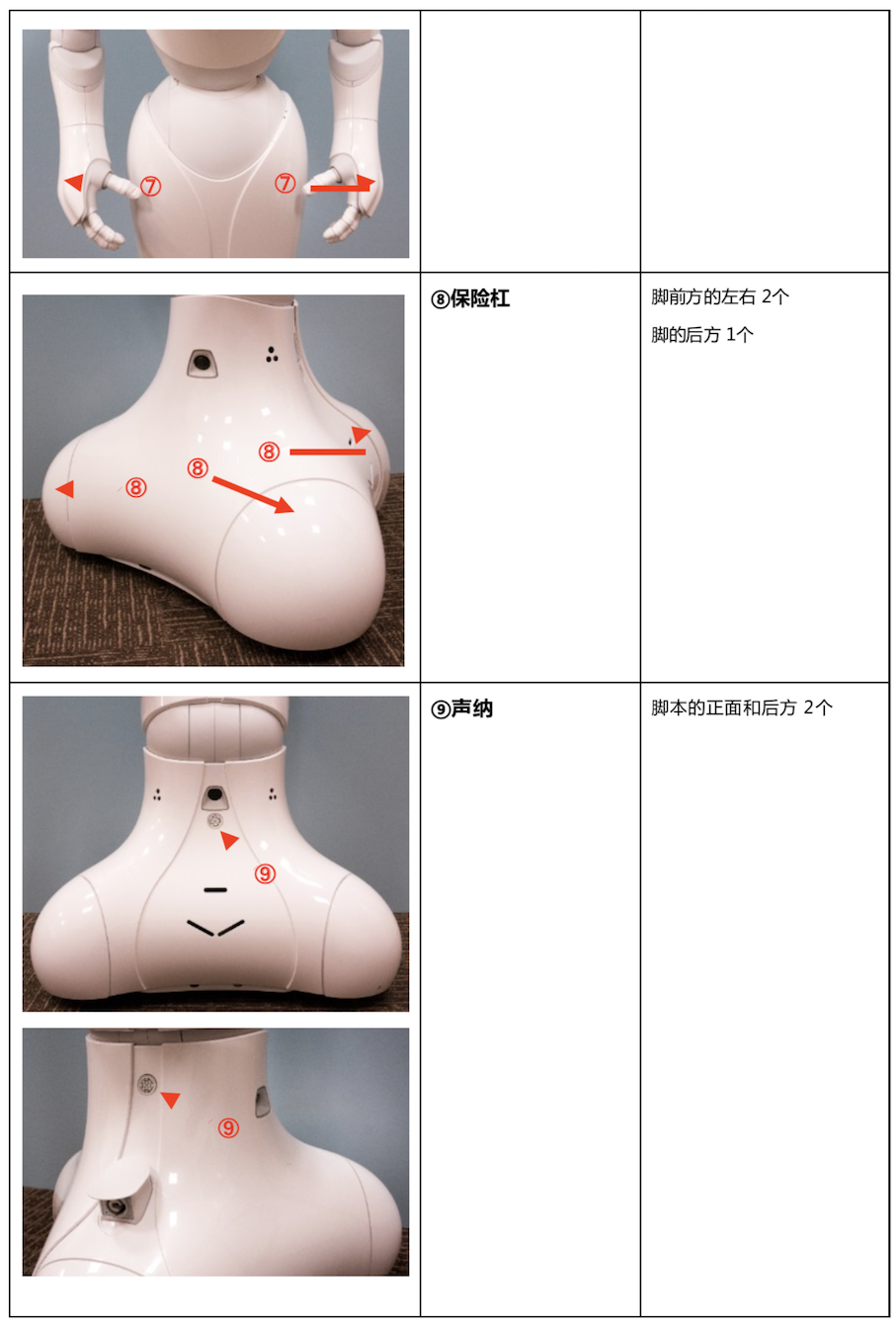
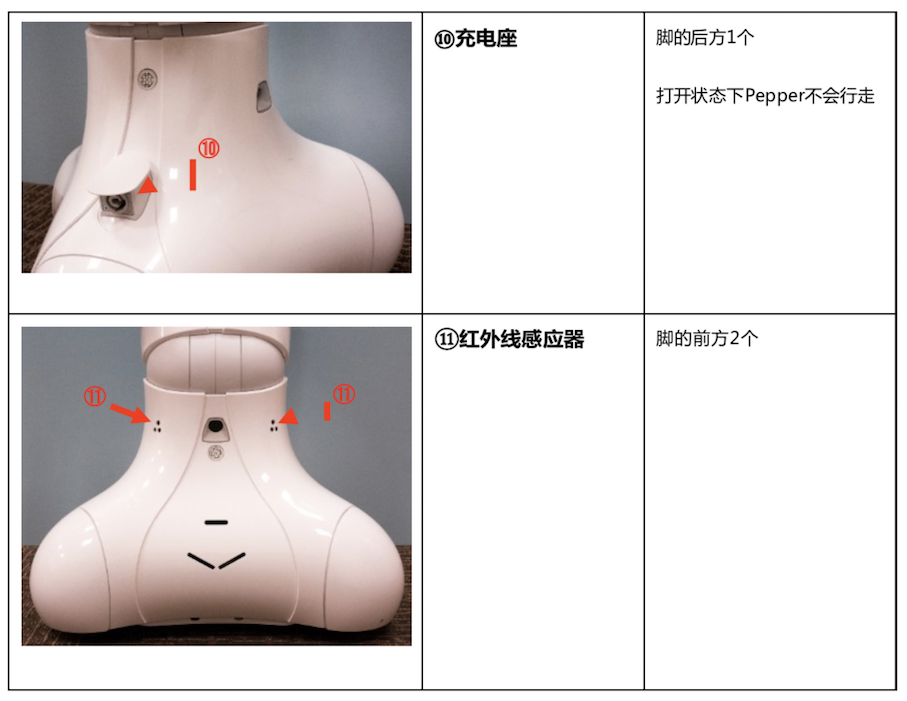
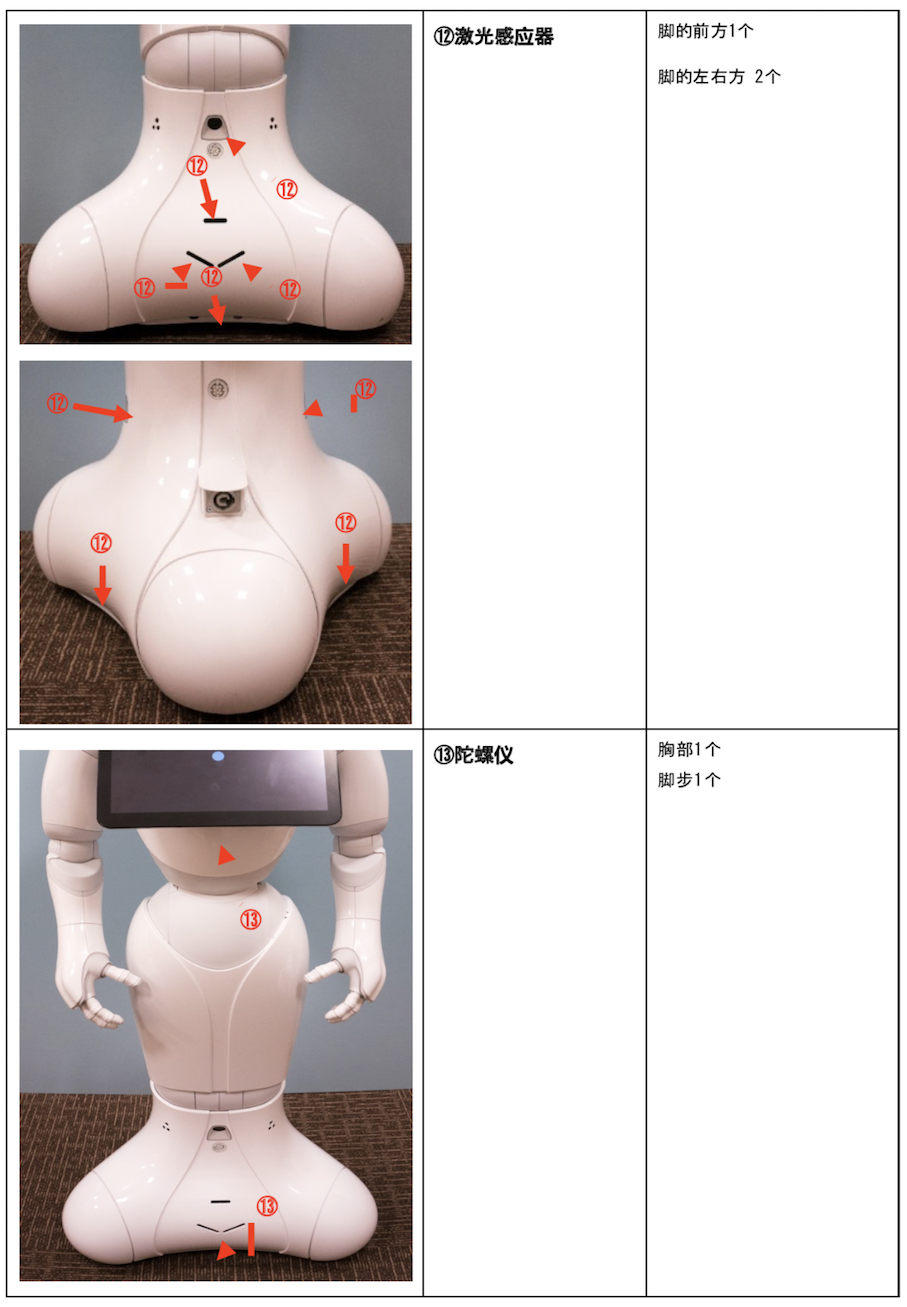
1.1 感应器设备
1.2 屏幕
Pepper胸部有一个可以触摸的显示器,该显示器是一块Andorid平板电脑。
注意它目前只能用于Pepper App的画面显示,不能运行Android应用。
Pepper显示器的参数如下:
为了保证用户体验,开发App时推荐字体使用60pt以上。
| 型号 | 规格 |
|---|---|
| 旧版本 | 1707 px * 1019 px |
| 新版本(18a) | 962 px * 601 px |
1.3 Robot ID 的位置
Robot ID 在Pepper脖子后面的紧急停止按钮附近。
- Robot ID 二维码的旁边
- Robot ID AP990483是18a















 2601
2601

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









