









边缘检测是图像处理中的重要任务之一,它通过识别图像中的边缘信息来突出图像中的物体和结构。常见的边缘检测算法有 Canny 边缘检测、Sobel 算子 和 Laplacian of Gaussian (LoG)。这些算法常用于计算机视觉中,如图像分割、物体识别、图像匹配等任务。

在本文中,我们将详细介绍如何使用 OpenCV 实现这三种边缘检测算法。
1. Canny 边缘检测(Canny Edge Detection)
Canny 边缘检测是一种多阶段算法,旨在提取图像中明显的边缘。它被广泛认为是最优的边缘检测方法之一,主要由以下几个步骤组成:
- 降噪:使用高斯滤波器去除噪声。
- 计算梯度:通过计算图像的梯度来获取边缘的方向。
- 非极大值抑制:去除梯度幅值小的像素点,只保留可能的边缘。
- 双阈值检测:设置高低两个阈值,标记强边缘、弱边缘,并通过连接弱边缘与强边缘形成最终边缘。
import cv2
class FrameObject:
def __init__(self):
self.init_parameters()
def init_parameters(self, *args, **kwargs):
pass
def do(self, frame, device):
# 转换为灰度图像
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 使用 Canny 算子进行边缘检测
edges = cv2.Canny(gray, 100, 200) # 100 和 200 为低高阈值
# 将边缘图像转换为 3 通道,以便与原图像叠加
edges_colored = cv2.cvtColor(edges, cv2.COLOR_GRAY2BGR)
return edges_colored
在上面的代码中,我们使用 cv2.Canny() 函数进行 Canny 边缘检测,其中 100 和 200 分别是低阈值和高阈值。 。
。
2. Sobel 算子(Sobel Operator)
Sobel 算子是一种简单且常用的边缘检测方法,它通过计算图像的梯度来检测边缘。Sobel 算子分别计算水平方向(dx)和垂直方向(dy)的梯度,并结合这两个方向的梯度幅值来检测边缘。
Sobel 算子用于检测图像的局部边缘,主要步骤包括:
- 计算水平方向和垂直方向的梯度。
- 使用梯度幅值来提取边缘。
Sobel 算子在计算图像的梯度时,使用的是一个卷积操作,常见的 Sobel 核函数如下:
-
水平 Sobel 核:
[-1, 0, 1] [-2, 0, 2] [-1, 0, 1] -
垂直 Sobel 核:
[-1, -2, -1] [ 0, 0, 0] [ 1, 2, 1]
import cv2
import numpy as np
class FrameObject:
def __init__(self):
self.init_parameters()
def init_parameters(self, *args, **kwargs):
pass
def do(self, frame, device):
# 转换为灰度图像
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 使用 Sobel 算子计算图像的梯度(分别计算 x 和 y 方向)
sobel_x = cv2.Sobel(gray, cv2.CV_64F, 1, 0, ksize=3) # X 方向
sobel_y = cv2.Sobel(gray, cv2.CV_64F, 0, 1, ksize=3) # Y 方向
# 计算梯度幅值
magnitude = cv2.magnitude(sobel_x, sobel_y)
# 将幅值转换为 8 位整数
magnitude = cv2.convertScaleAbs(magnitude)
# 将边缘图像转换为 3 通道,以便与原图像叠加
sobel_edges = cv2.cvtColor(magnitude, cv2.COLOR_GRAY2BGR)
return sobel_edges
在这个代码中,cv2.Sobel() 函数用于计算水平方向(grad_x)和垂直方向(grad_y)的梯度,然后使用 cv2.magnitude() 计算梯度的幅值,最后得到图像的边缘信息。
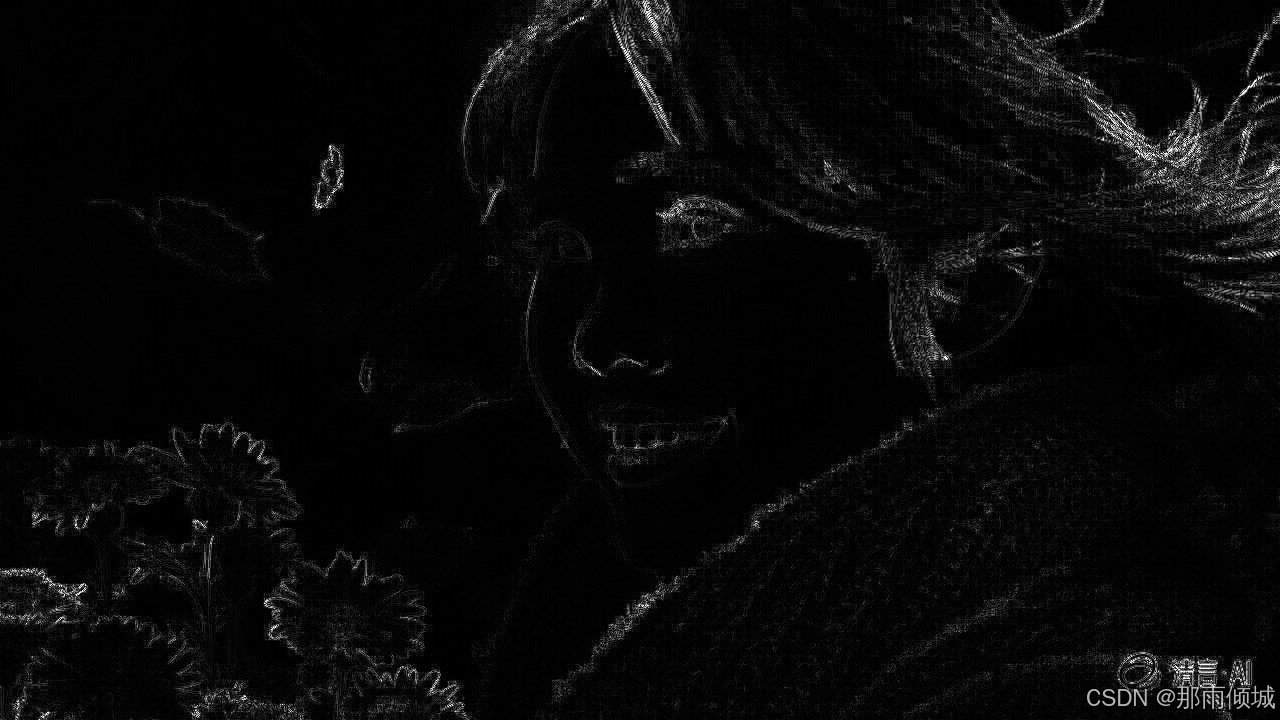
3. Laplacian of Gaussian (LoG)
Laplacian of Gaussian(LoG)是一种结合了高斯滤波和拉普拉斯算子的边缘检测方法。它首先使用高斯滤波平滑图像以去除噪声,然后通过拉普拉斯算子计算图像的二阶导数,进而检测图像的边缘。
LoG 算子可以有效地检测图像中的边缘和细节,它通常在检测轮廓或物体边界时效果较好。
- 高斯滤波(Gaussian Filter):用于去除噪声,确保边缘检测算法的鲁棒性。
- 拉普拉斯算子(Laplacian Operator):通过计算图像的二阶导数,捕捉图像的边缘。
import cv2
import numpy as np
class FrameObject:
def __init__(self):
self.init_parameters()
def init_parameters(self, *args, **kwargs):
pass
def do(self, frame, device):
# 转换为灰度图像
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 使用高斯滤波器平滑图像
blurred = cv2.GaussianBlur(gray, (1, 1), 0)
# 使用拉普拉斯算子检测边缘
log_edges = cv2.Laplacian(blurred, cv2.CV_64F)
# 取绝对值并转换为8位图像
log_edges = cv2.convertScaleAbs(log_edges)
# 将边缘图像转换为 3 通道,以便与原图像叠加
log_edges_colored = cv2.cvtColor(log_edges, cv2.COLOR_GRAY2BGR)
return log_edges_colored
在上述代码中,首先使用高斯滤波器对图像进行模糊处理,然后应用拉普拉斯算子计算二阶导数,最后得到图像的边缘信息。
4. 总结
边缘检测是计算机视觉中至关重要的一步,它帮助我们从图像中提取出物体的轮廓。使用 Canny 边缘检测、Sobel 算子 和 Laplacian of Gaussian (LoG) 算法可以有效地提取图像的边缘信息,常用于图像分割、物体检测等任务。
- Canny 边缘检测:通过多阶段处理获得精确的边缘,是一种强大的边缘检测算法。
- Sobel 算子:通过计算图像的梯度来检测边缘,简单且高效,适用于实时应用。
- Laplacian of Gaussian (LoG):结合高斯滤波和拉普拉斯算子的优点,能够有效检测图像中的边缘和细节。
在实际应用中,选择哪种边缘检测方法取决于具体的任务和图像的特性。

















 1555
1555

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









