






基于opencv双目校正、匹配以及双目测距
在完成双目标定后,使用matlab的双目标定结果,通过本文代码实现双目匹配以及测距功能。
一共有6个参数供opencv调用,
camera1的内参stereoParams.CameraParameters1.IntrinsicMatrix,需要转置一下才能给opencv用
camera1畸变,
camera2的内参stereoParams.CameraParameters1.IntrinsicMatrix,需要转置一下才能给opencv用
camera2畸变,
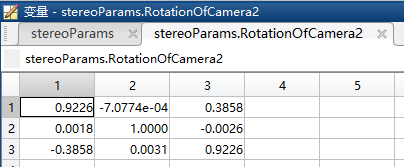
camera2相对于camera1的旋转矩阵R,
平移向量T,
RadialDistortion为径向畸变K1,K2,K3,TangentialDistortion为切向畸变P1,P2,opencv调用时,写成K1,K2,P1,P2,K3的形式。
其中stereoParams.RotationOfCamera2需要转置一下才能给opencv用



双目校正以及双目测距程序
const int imageWidth = 1280; //摄像头的分辨率
const int imageHeight = 960;
Size imageSize = Size(imageWidth, imageHeight);
Mat rgbImageL, grayImageL;
Mat rgbImageR, grayImageR;
Mat rectifyImageL, rectifyImageR;
Rect validROIL; //图像校正之后,会对图像进行裁剪,这里的validROI就是指裁剪之后的区域
Rect validROIR;
Mat mapLx, mapLy, mapRx, mapRy; //映射表
Mat Rl, Rr, Pl, Pr, Q; //校正旋转矩阵R,投影矩阵P 重投影矩阵Q
Mat xyz; //三维坐标
Point origin; //鼠标按下的起始点
Rect selection; //定义矩形选框
bool selectObject = false; //是否选择对象
int blockSize = 0, uniquenessRatio = 0, numDisparities = 0;
Ptr<StereoBM> bm = StereoBM::create(16, 9);
Mat cameraMatrixL = (Mat_<double>(3, 3) << 2144.06346549771, 0.100643435575966, 646.043075091062,
0, 2143.99089450596, 464.484668545036,
0, 0, 1);
//对应matlab里的左相机标定矩阵
Mat distCoeffL = (Mat_<double>(5, 1) << -0.104172724212748, 0.631426634642516, -0.000140339755577950, -2.84532653431087e-05, -2.98168604169012);
//对应Matlab所得左i相机畸变参数
Mat cameraMatrixR = (Mat_<double>(3, 3) << 2138.90347672270, 0.0977396849787843, 616.264883906150,
0, 2138.45223485518, 487.443540617963,
0, 0, 1);
//对应matlab里的右相机标定矩阵
Mat distCoeffR = (Mat_<double>(5, 1) << -0.107664131896022, 0.931919012650515, 0.000771517217186294, -0.00222846348625879, -6.73584559954540);
//对应Matlab所得右相机畸变参数
Mat T = (Mat_<double>(3, 1) << 217.566795926254, -1.47347980033928, 40.6236428586625);//T平移向量
//对应Matlab所得T参数
//Mat rec = (Mat_<double>(3, 1) << -0.00306, -0.03207, 0.00206); //rec旋转向量,对应matlab om参数
Mat R = (Mat_<double>(3, 3) << 0.922572822248496, 0.00184459869643134, -0.385818590925962,
-0.000707735126960054, 0.999994979714303, 0.00308863354582006,
0.385822351295821, -0.00257643199782606, 0.922569496156644); //R 旋转矩阵
/*****立体匹配*****/
void stereo_match(int, void*)
{
bm->setBlockSize(2 * blockSize + 5); //SAD窗口大小,5~21之间为宜
bm->setROI1(validROIL);
bm->setROI2(validROIR);
bm->setPreFilterCap(31);
bm->setMinDisparity(0); //最小视差,默认值为0, 可以是负值,int型
bm->setNumDisparities(numDisparities * 16 + 16);//视差窗口,即最大视差值与最小视差值之差,窗口大小必须是16的整数倍,int型
bm->setTextureThreshold(10);
bm->setUniquenessRatio(uniquenessRatio);//uniquenessRatio主要可以防止误匹配
bm->setSpeckleWindowSize(100);
bm->setSpeckleRange(32);
bm->setDisp12MaxDiff(-1);
Mat disp, disp8;
bm->compute(rectifyImageL, rectifyImageR, disp);//输入图像必须为灰度图
disp.convertTo(disp8, CV_8U, 255 / ((numDisparities * 16 + 16)*16.));//计算出的视差是CV_16S格式
reprojectImageTo3D(disp, xyz, Q, true); //在实际求距离时,ReprojectTo3D出来的X / W, Y / W, Z / W都要乘以16(也就是W除以16),才能得到正确的三维坐标信息。
xyz = xyz * 16;
imshow("disparity", disp8);
}
/*****描述:鼠标操作回调*****/
static void onMouse(int event, int x, int y, int, void*)
{
if (selectObject)
{
selection.x = MIN(x, origin.x);
selection.y = MIN(y, origin.y);
selection.width = std::abs(x - origin.x);
selection.height = std::abs(y - origin.y);
}
switch (event)
{
case EVENT_LBUTTONDOWN: //鼠标左按钮按下的事件
origin = Point(x, y);
selection = Rect(x, y, 0, 0);
selectObject = true;
cout << origin << "in world coordinate is: " << xyz.at<Vec3f>(origin) << endl;
break;
case EVENT_LBUTTONUP: //鼠标左按钮释放的事件
selectObject = false;
if (selection.width > 0 && selection.height > 0)
break;
}
}
/*****主函数*****/
int main()
{
/*
立体校正
*/
//Rodrigues(rec, R); //Rodrigues变换
stereoRectify(cameraMatrixL, distCoeffL, cameraMatrixR, distCoeffR, imageSize, R, T, Rl, Rr, Pl, Pr, Q, CALIB_ZERO_DISPARITY,
0, imageSize, &validROIL, &validROIR);
initUndistortRectifyMap(cameraMatrixL, distCoeffL, Rl, Pr, imageSize, CV_32FC1, mapLx, mapLy);
initUndistortRectifyMap(cameraMatrixR, distCoeffR, Rr, Pr, imageSize, CV_32FC1, mapRx, mapRy);
/*
读取图片
*/
rgbImageL = imread("l1.bmp", CV_LOAD_IMAGE_COLOR);
cvtColor(rgbImageL, grayImageL, CV_BGR2GRAY);
rgbImageR = imread("r1.bmp", CV_LOAD_IMAGE_COLOR);
cvtColor(rgbImageR, grayImageR, CV_BGR2GRAY);
imshow("ImageL Before Rectify", grayImageL);
imshow("ImageR Before Rectify", grayImageR);
/*
经过remap之后,左右相机的图像已经共面并且行对准了
*/
remap(grayImageL, rectifyImageL, mapLx, mapLy, INTER_LINEAR);
remap(grayImageR, rectifyImageR, mapRx, mapRy, INTER_LINEAR);
/*
把校正结果显示出来
*/
Mat rgbRectifyImageL, rgbRectifyImageR;
cvtColor(rectifyImageL, rgbRectifyImageL, CV_GRAY2BGR); //伪彩色图
cvtColor(rectifyImageR, rgbRectifyImageR, CV_GRAY2BGR);
//单独显示
//rectangle(rgbRectifyImageL, validROIL, Scalar(0, 0, 255), 3, 8);
//rectangle(rgbRectifyImageR, validROIR, Scalar(0, 0, 255), 3, 8);
imshow("ImageL After Rectify", rgbRectifyImageL);
imshow("ImageR After Rectify", rgbRectifyImageR);
//显示在同一张图上
Mat canvas;
double sf;
int w, h;
sf = 600. / MAX(imageSize.width, imageSize.height);
w = cvRound(imageSize.width * sf);
h = cvRound(imageSize.height * sf);
canvas.create(h, w * 2, CV_8UC3); //注意通道
//左图像画到画布上
Mat canvasPart = canvas(Rect(w * 0, 0, w, h)); //得到画布的一部分
resize(rgbRectifyImageL, canvasPart, canvasPart.size(), 0, 0, INTER_AREA); //把图像缩放到跟canvasPart一样大小
Rect vroiL(cvRound(validROIL.x*sf), cvRound(validROIL.y*sf), //获得被截取的区域
cvRound(validROIL.width*sf), cvRound(validROIL.height*sf));
//rectangle(canvasPart, vroiL, Scalar(0, 0, 255), 3, 8); //画上一个矩形
cout << "Painted ImageL" << endl;
//右图像画到画布上
canvasPart = canvas(Rect(w, 0, w, h)); //获得画布的另一部分
resize(rgbRectifyImageR, canvasPart, canvasPart.size(), 0, 0, INTER_LINEAR);
Rect vroiR(cvRound(validROIR.x * sf), cvRound(validROIR.y*sf),
cvRound(validROIR.width * sf), cvRound(validROIR.height * sf));
//rectangle(canvasPart, vroiR, Scalar(0, 0, 255), 3, 8);
cout << "Painted ImageR" << endl;
//画上对应的线条
for (int i = 0; i < canvas.rows; i += 16)
line(canvas, Point(0, i), Point(canvas.cols, i), Scalar(0, 255, 0), 1, 8);
imshow("rectified", canvas);
/*
立体匹配
*/
namedWindow("disparity", CV_WINDOW_AUTOSIZE);
// 创建SAD窗口 Trackbar
createTrackbar("BlockSize:\n", "disparity", &blockSize, 8, stereo_match);
// 创建视差唯一性百分比窗口 Trackbar
createTrackbar("UniquenessRatio:\n", "disparity", &uniquenessRatio, 50, stereo_match);
// 创建视差窗口 Trackbar
createTrackbar("NumDisparities:\n", "disparity", &numDisparities, 16, stereo_match);
//鼠标响应函数setMouseCallback(窗口名称, 鼠标回调函数, 传给回调函数的参数,一般取0)
setMouseCallback("disparity", onMouse, 0);
stereo_match(0, 0);
waitKey(0);
return 0;
}















 6758
6758











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









