







一、实验目的
本次实验主要完成使用usart完成stm32的串口通信,以下为具体要求:
1)设置波特率为115200,1位停止位,无校验位。
2)STM32系统给上位机(win10)连续发送“hello windows!”,上位机接收程序可以使用“串口调试助手“,也可自己编程。
3)当上位机给stm32发送“Stop,stm32”后,stm32停止发送。
二、串口和usart
首先,来认识认识串口和usart

USART是一个全双工通用同步/异步串行收发模块,该接口是一个高度灵活的串行通信设备。有别与USART,还有一个UART,它在USART基础上裁剪掉了同步通信功能,只有异步通信。简单区分同步和异步就是看通信时需不需要对外提供时钟输出,我们平时用的串口通信基本都是
UART。 串口通信一般是以帧格式传输数据,即一帧一帧传输,每帧包含有起始信号、数据信息、停止信息,可能还有校验信息。 USART
满足外部设备对工业标准 NRZ 异步串行数据格式的要求,并且使用了小数波特率发生器,可以提供多种波特率,使得它的应用更加广泛。USART
支持同步单向通信和半双工单线通信;还支持局域互连网络 LIN、智能卡(SmartCard)协议与 lrDA(红外线数据协会) SIR
ENDEC规范。 USART支持使用 DMA,可实现高速数据通信。
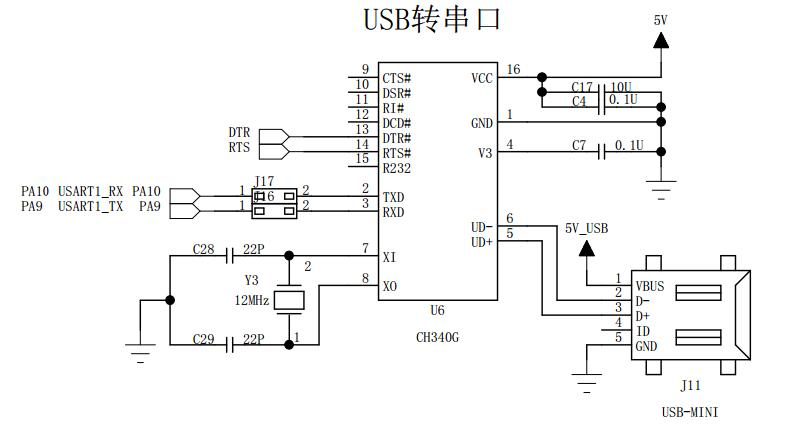
以下即为stm32芯片和USB-转串口的连接方式。
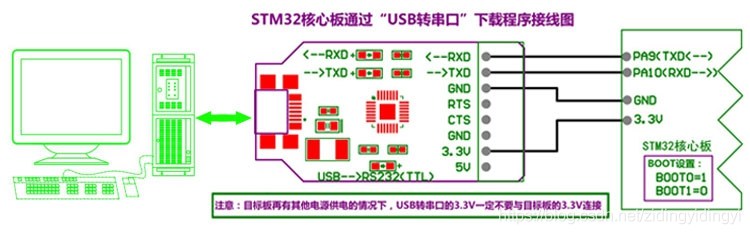
使用杜邦线将核心板与USB转TTL接口相连
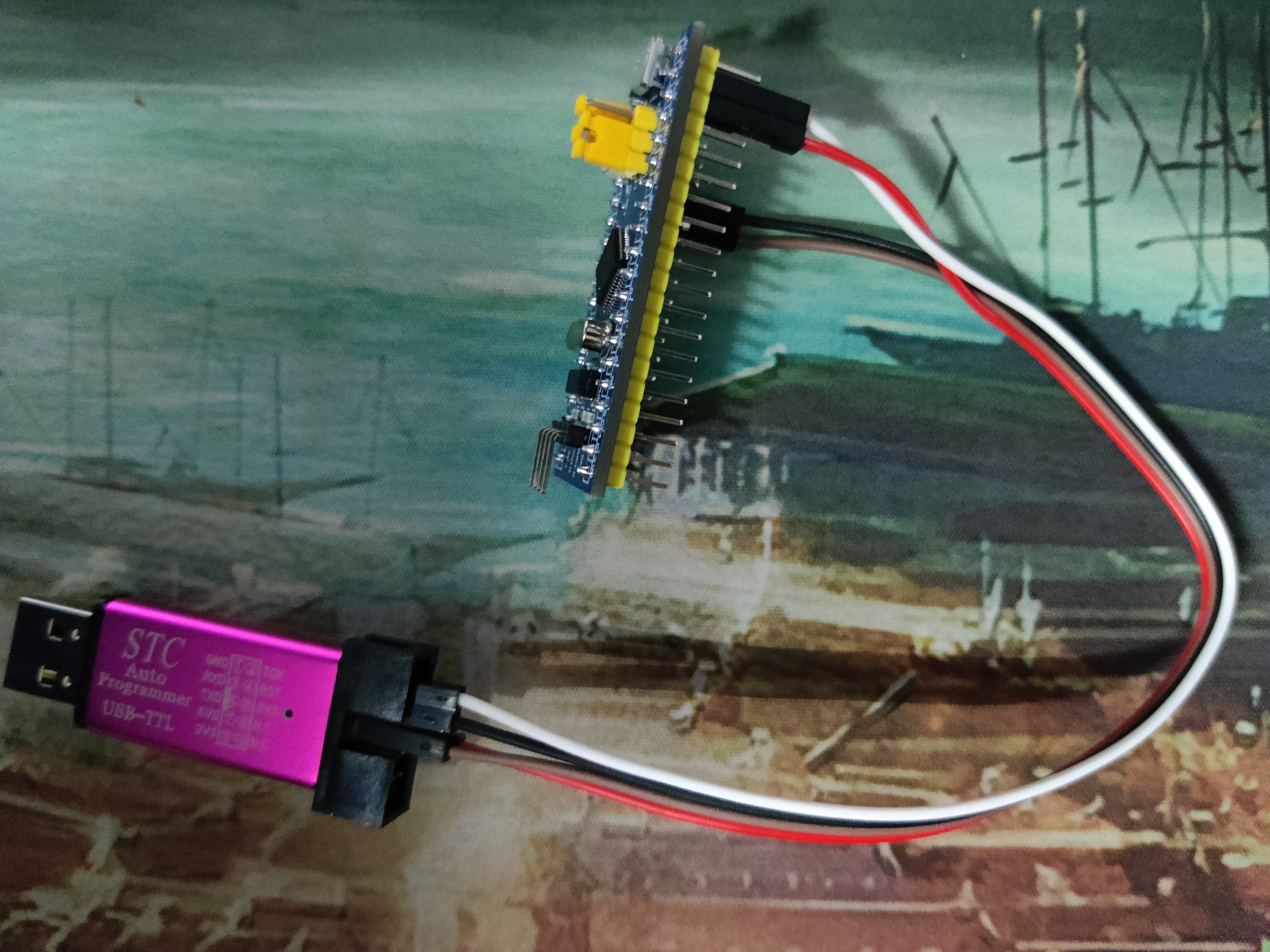
而我使用的是野火指南者,直接连usb即可

三、相关代码
Keil5创建一个新的工程,引入固件库后新建三个文件
main.c
#include "stm32f10x.h"
#include "bsp_usart.h"
// 接收缓冲,最大100个字节
uint8_t USART_RX_BUF[100];
// 接收状态标记位
uint16_t USART_RX_FLAG=0;
/*********************************************************
串口中断函数
**********************************************************/
void DEBUG_USART_IRQHandler(void)
{
uint8_t temp;
//接收中断
if(USART_GetFlagStatus(DEBUG_USARTx, USART_IT_RXNE) != RESET)
{
// 读取接收的数据
temp = USART_ReceiveData(DEBUG_USARTx);
//接收未完成
if((USART_RX_FLAG & 0x8000)==0)
{
//接收到了0x0d
if(USART_RX_FLAG & 0x4000)
{
// 接收错误,重新开始
if(temp != 0x0a) USART_RX_FLAG=0;
// 接收完成
else USART_RX_FLAG |= 0x8000;
}
// 还未接收到0x0d
else
{
if(temp == 0x0d) USART_RX_FLAG |= 0x4000;
else
{
USART_RX_BUF[USART_RX_FLAG & 0x3FFF]=temp;
USART_RX_FLAG++;
//接收数据错误,重新开始接收
if(USART_RX_FLAG > 99) USART_RX_FLAG=0;
}
}
}
}
}
int main(void)
{
uint8_t len=0;
uint8_t i=0;
// USART初始化
USART_Config();
while(1)
{
if(USART_RX_FLAG & 0x8000)
{
// 获取接收到的数据长度
len = USART_RX_FLAG & 0x3FFF;
printf("你发送的消息为:");
for(i=0; i<len;i++)
{
// 向串口发送数据
USART_SendData(DEBUG_USARTx, USART_RX_BUF[i]);
//等待发送结束
while(USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_TC)!=SET);
}
printf("\n\n");
if(strcmp((char *)USART_RX_BUF,"Stop,stm32!")==0)
{
printf("stm32已停止发送!");
break;
}
USART_RX_FLAG=0;
memset(USART_RX_BUF,0,sizeof(USART_RX_BUF));
}
else
{
printf("hello windows!\n");
delay_ms(800);
}
}
}
bsp_usart.h
#ifndef __BSP_USART_H__
#define __BSP_USART_H__
#include "stm32f10x.h"
#include <stdio.h>
#include <string.h>
/******************************************************
串口的宏定义:总线时钟宏和GPIO的宏
*******************************************************/
// 串口USART1
#define DEBUG_USARTx USART1
#define DEBUG_USART_CLK RCC_APB2Periph_USART1
#define DEBUG_USART_APBxClkCmd RCC_APB2PeriphClockCmd
#define DEBUG_USART_BAUDRATE 115200
// USART GPIO 引脚宏定义
#define DEBUG_USART_GPIO_CLK (RCC_APB2Periph_GPIOA)
#define DEBUG_USART_GPIO_APBxClkCmd RCC_APB2PeriphClockCmd
#define DEBUG_USART_TX_GPIO_PORT GPIOA
#define DEBUG_USART_TX_GPIO_PIN GPIO_Pin_9
#define DEBUG_USART_RX_GPIO_PORT GPIOA
#define DEBUG_USART_RX_GPIO_PIN GPIO_Pin_10
#define DEBUG_USART_IRQ USART1_IRQn
#define DEBUG_USART_IRQHandler USART1_IRQHandler
// 函数
void USART_Config(void);
void Usart_SendByte(USART_TypeDef * pUSARTx, uint8_t ch);
void Usart_SendString(USART_TypeDef * pUSARTx, char *str);
void delay_ms(uint16_t delay_ms);
#endif /*__BSP_USART_H__*/
bsp_usart.c
#include "bsp_usart.h"
/**************************************************
配置嵌套向量中断控制器NVIC
**************************************************/
static void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
// 嵌套向量中断控制器组选择
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
// 配置USART为中断源
NVIC_InitStructure.NVIC_IRQChannel = DEBUG_USART_IRQ;
// 抢断优先级
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
// 子优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
// 使能中断
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
// 初始化配置NVIC
NVIC_Init(&NVIC_InitStructure);
}
/**************************************************
USART初始化配置
**************************************************/
void USART_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
// 打开串口GPIO的时钟
DEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_GPIO_CLK, ENABLE);
// 打开串口外设的时钟
DEBUG_USART_APBxClkCmd(DEBUG_USART_CLK, ENABLE);
// 将USART Tx的GPIO配置为推挽复用模式
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_TX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(DEBUG_USART_TX_GPIO_PORT, &GPIO_InitStructure);
// 将USART Rx的GPIO配置为浮空输入模式
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_RX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(DEBUG_USART_RX_GPIO_PORT, &GPIO_InitStructure);
// 配置串口的工作参数
// 配置波特率
USART_InitStructure.USART_BaudRate = DEBUG_USART_BAUDRATE;
// 配置 针数据字长
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
// 配置停止位
USART_InitStructure.USART_StopBits = USART_StopBits_1;
// 配置校验位
USART_InitStructure.USART_Parity = USART_Parity_No ;
// 配置硬件流控制
USART_InitStructure.USART_HardwareFlowControl =
USART_HardwareFlowControl_None;
// 配置工作模式,收发一起
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
// 完成串口的初始化配置
USART_Init(DEBUG_USARTx, &USART_InitStructure);
// 串口中断优先级配置
NVIC_Configuration();
// 使能串口接收中断
USART_ITConfig(DEBUG_USARTx, USART_IT_RXNE, ENABLE);
// 使能串口
USART_Cmd(DEBUG_USARTx, ENABLE);
}
/**************************************************
发送一个字节
**************************************************/
void Usart_SendByte(USART_TypeDef * pUSARTx, uint8_t ch)
{
// 发送一个字节数据到USART
USART_SendData(pUSARTx, ch);
// 等待发送数据寄存器为空
while(USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
}
/**************************************************
发送字符串
**************************************************/
void Usart_SendString(USART_TypeDef * pUSARTx, char *str)
{
do
{
Usart_SendByte(pUSARTx, *str++);
}while(*str != '\0');
// 等待发送完成
while(USART_GetFlagStatus(pUSARTx,USART_FLAG_TC) == RESET);
}
/**************************************************
微秒级的延时
**************************************************/
void delay_us(uint32_t delay_us)
{
volatile unsigned int num;
volatile unsigned int t;
for (num = 0; num < delay_us; num++)
{
t = 11;
while (t != 0)
{
t--;
}
}
}
/**************************************************
毫秒级的延时
**************************************************/
void delay_ms(uint16_t delay_ms)
{
volatile unsigned int num;
for (num = 0; num < delay_ms; num++)
{
delay_us(1000);
}
}
/***************************************************
重定向c库函数printf到串口,重定向后可使用printf函数
****************************************************/
int fputc(int ch, FILE *f)
{
// 发送一个字节数据到串口
USART_SendData(DEBUG_USARTx, (uint8_t) ch);
// 等待发送完毕
while(USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_TXE) == RESET);
return (ch);
}
/*********************************************************
重定向c库函数scanf到串口,重定向后可使用scanf、getchar函数
**********************************************************/
int fgetc(FILE *f)
{
// 等待串口输入数据
while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_RXNE) == RESET);
return (int)USART_ReceiveData(DEBUG_USARTx);
}
四、结果与演示
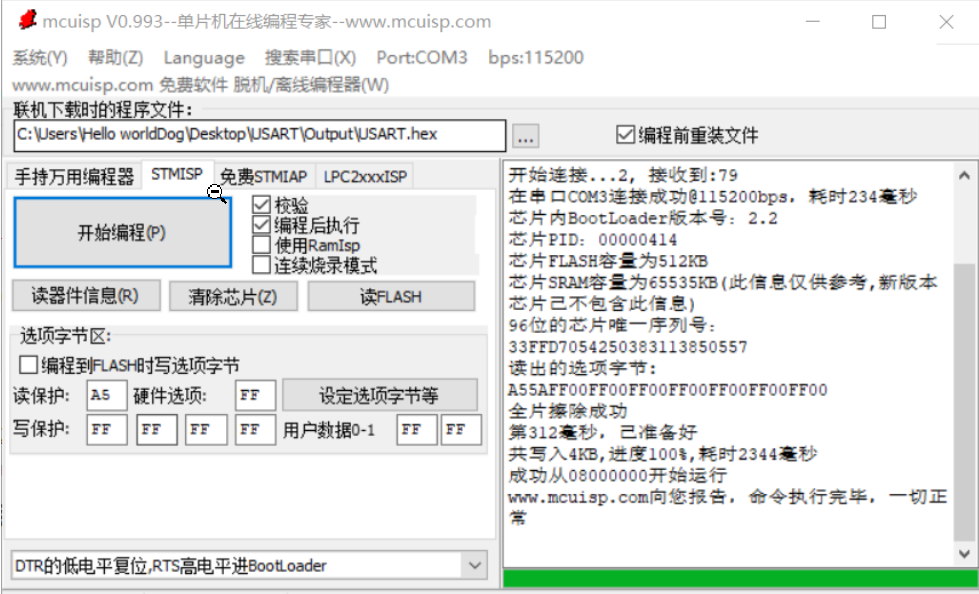
使用mcuisp将程序烧录进指南者板子中
接下来就可以使用串口调试助手进行验证了
可以看到输入“Stop,stm32!”后板子停止发送“hello windows!”。
五、参考
①STM32串口通信USART学习笔记
②stm32串口通信 —— USART通信实践
③STM32系统学习——USART(串口通信)














 297
297











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









