







 本文提出了一种使用Transformer端到端预测车道形状的方法,克服了传统特征提取和后处理的局限,能更好地捕捉车道的细长结构和全局信息。模型基于车道形状的先验模型,通过曲线重新参数化和匈牙利拟合损失进行训练,实验结果显示在车道检测任务上表现出色。
本文提出了一种使用Transformer端到端预测车道形状的方法,克服了传统特征提取和后处理的局限,能更好地捕捉车道的细长结构和全局信息。模型基于车道形状的先验模型,通过曲线重新参数化和匈牙利拟合损失进行训练,实验结果显示在车道检测任务上表现出色。
摘要
主流做法(特征提取和后处理)比较有用,但无法学习车道线的细长结构,学习过程有瑕疵。本文提出的端到段方法可以直接输出车道线的形状参数,transformer可以学习全局信息和车道线独有的结构。
引言
提出了个数据集 Forward View Lane (FVL)。
相关工作
和PolyLaneNet类似的思路,在这项工作中,我们的方法也期望参数输出,但不同之处在于这些参数来自车道形状模型,该模型对道路结构和相机姿势进行建模。 这些输出参数具有明确的物理意义,而不是简单的多项式系数。 此外,我们的网络是用 Transformer Block 构建的,该模块在对非局部交互进行建模时表现出注意力,使其能够加强对车道细长结构的捕获和全局上下文信息的学习。
方法
车道形状模型
车道形状的先验模型被定义为道路上的多项式。 通常,三次曲线用于近似平坦地面上的单车道线:

其中,k、m、n、b是实数参数,k!=0;(X, Z) 表示地平面上的点。 当光轴平行于地平面时,从道路投影到像平面上的曲线为:

其中,k’、m’、n’、b’是参数和相机内参、外参的组合,(u, v) 是图像平面上的像素。
对于光轴与地平面成 φ 角的倾斜相机,从倾斜图像平面到倾斜图像平面的变换曲线为:
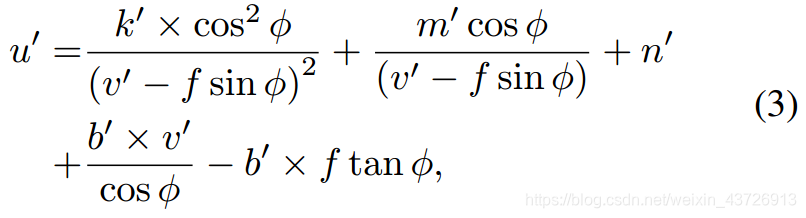
这里 f 是以像素为单位的焦距,(u’, v’) 是相应的变换。 当 φ = 0 时,曲线函数方程为 3 将简化为等式 2。推导的细节可以在Sec.7中查看。
曲线重新参数化
通过将参数与俯仰角 φ 相结合,倾斜相机平面中的曲线具有以下形式:

这里,两个常数项 n’ 和 b’’’ 没有积分,因为它们包含不同的物理参数。
除此之外,还引入了垂直起点和终点偏移α,β来参数化每条车道线。这两个参数提供了描述车道线上下边界的基本定位信息。
在实际道路条件下,车道通常具有全局一致的形状。 因此,从左到右车道的近似弧具有相等的曲率,因此所有车道将共享 k ‘’, f’’, m’’, n’。 因此,第 t 条车道的输出被重新参数化为 gt:

其中 t ∈ {1, …, T},T 是图像中的车道数。 每条车道仅在偏置项和下/上边界方面有所不同。
Hungarian拟合损失
匈牙利拟合损失在预测参数和地面实况车道之间执行二分匹配,以找出正负。 匈牙利算法有效地解决了匹配问题。 然后匹配结果用于优化特定车道的回归损失。
二分匹配
我们的方法预测固定的 N 条曲线,其中 N 设置为大于典型数据集图像中的最大车道数。
 表示预测曲线。
表示预测曲线。
其中, (0:无线,1:有线)。
(0:无线,1:有线)。
ground truth车道标记用序列 表示。
表示。
其中,r表示r 依次索引范围 R 内的样本点并且 。
。
由于预测曲线的数量 N 大于 ground truth 车道的数量,我们将 ground truth车道也视为一组大小为 N 的填充有非车道
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2002
2002

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









