






介绍
采用PID控制方法,我先采用位置式输出方式,公式原型:u(t) = kp * e(t) + ki * [e(1) + e(2) +
…+ e(t)] + kd * [e(t) -
e(t-1)],这里先做基本的PID算法,达到控制目标后再来优化算法提高恒温精度,考虑到实验温度过高实验时间会过长,所以我先定目标控制温度为110度,等控制好了再看其他温度会达到多少精度,为了提高加热速度提前20度开始PID控温下面是调节参数的过程及数据:
参照网上一些方法,先确定Kp,即令Ki,Kd=0,只用比例调节,得到一个稳定的越接近控制目标的震荡参数,然后根据这个Kp和震荡周期来计算Ti,Td
接下来根据下面典型参数计算表:
Ziegler-Nichols参数控制器 Kp Ti Td
P 0.50Kc / /
PD 0.65Kc / 0.12Pc
PI 0.45Kc 0.85Pc /
PID 0.65Kc 0.5Pc 0.12Pc我先做PD实验: 根据临界增益KC=9.2
震荡周期Pc=225秒,计算出Kp=5.98,Td=27秒,公式Kd=Kp*(Td/T)=5.9827/5=32.392
Ki = Kp(T/Ti)
##PID参数整定流程
第3次:Kp=8。5,这次的测试时间比较长,因为比较接近稳定震荡了,图片如下:
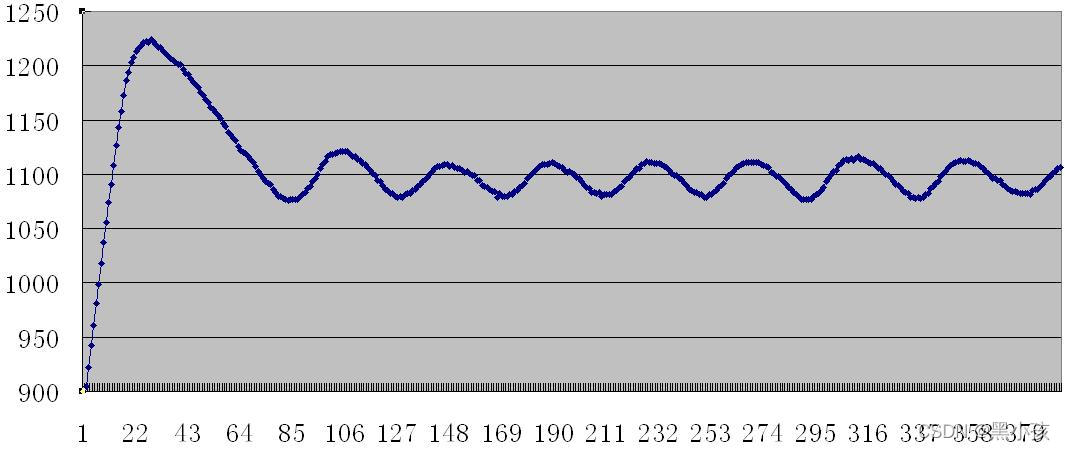
现在整理了一下Kp=9和Kp=9.3的震荡周期,图片分析如下

从数据看震荡周期基本都是48~43个点,每个点是5秒,所以震荡周期为225秒
typedef struct pid_t
{
float uk_delta;
float et_last;
float et_sum;
float et_before; //此次的误差
float et_now; //上次的误差
float kp;
float ki;
float kd;
}tempctrl_pid;
void GetPlate(int16_t HumiSet)//功率控制,设置模式中根据设置温度调整功率
{
float temptarget = 0;
static uint32_t heaterctrl_cnt = 0; //存储时间
if(healparam.healtime < 2500) //更新一次
{
heaterctrl_cnt = healparam.healtime;
return;
}
if(healparam.healtime - heaterctrl_cnt < 3000) //3秒控一次
return;
heaterctrl_cnt = healparam.healtime;
heaterctrl_pid.kp= 91;
heaterctrl_pid.kd = 207.5;
temptarget = 30 + HumiSet;
heaterctrl_pid.et_now = (temptarget - f_rhparam.AirwayTemp);
if(heaterctrl_pid.et_now < 2.0)
{
heaterctrl_pid.ki = 4.8;
heaterctrl_pid.et_sum += heaterctrl_pid.et_now;
}
else
{
heaterctrl_pid.ki = 0;
}
Percentage = heaterctrl_pid.kp*heaterctrl_pid.et_now + heaterctrl_pid.ki*heaterctrl_pid.et_sum + heaterctrl_pid.kd*(heaterctrl_pid.et_now - heaterctrl_pid.et_last);
heaterctrl_pid.et_last = heaterctrl_pid.et_now;
//printf("temp:%.1f et_now: %.1f per: %d\r\n", f_rhparam.AirwayTemp, heaterctrl_pid.et_now, Percentage_WR);
if(Percentage > 100)
Percentage = 100;
else if(Percentage < 0)
Percentage = 0;
注:借鉴某位大佬的调节过程参考链接**https://www.amobbs.com/thread-936512-1-1.html**














 4860
4860











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









