




 本文介绍了一种基于静态条件下的IMU初始化方法,通过检测加速度计的方差来判断设备是否处于静止状态,并据此估计重力方向及传感器偏置。
本文介绍了一种基于静态条件下的IMU初始化方法,通过检测加速度计的方差来判断设备是否处于静止状态,并据此估计重力方向及传感器偏置。
初始化是指在系统启动阶段,需要估计重力方向(gravity direction)、加速度计以及陀螺仪biases (accelerometer and gyroscope biases)、初始速度(initial velocity)、初始位置(initial position)等。
OpenVINS系统中,只估计了重力方向、加速度计/陀螺仪biases。
初始化函数位于:ov_msckf/src/core/VioManager.cpp 中
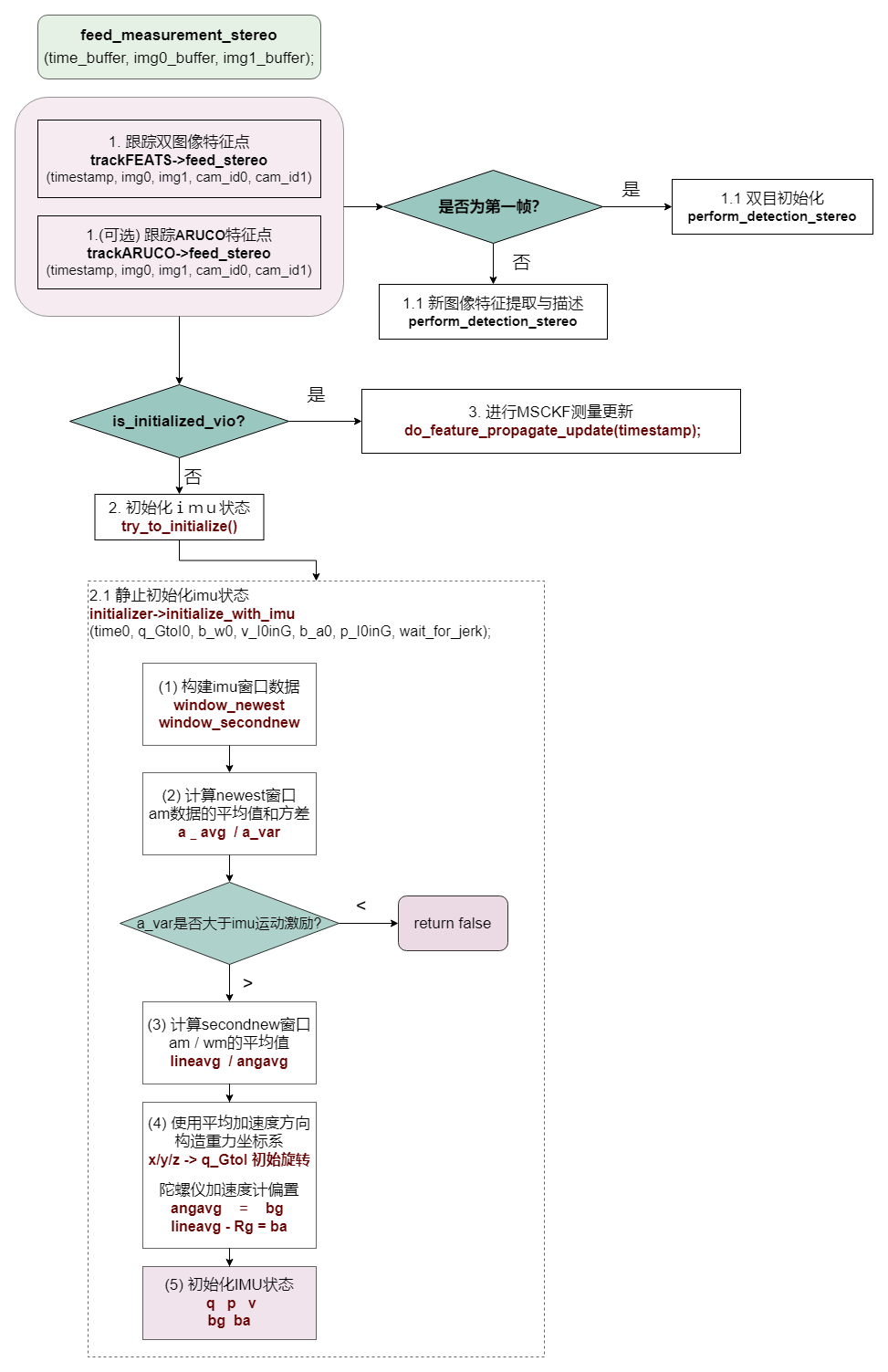
Manager::try_to_initialize()
一.静止初始化原理
静止初始化是指在视频序列开始阶段,需要有一段静止状态。
系统利用静止状态的IMU数据来估计重力方向、加速度计陀螺仪biases。
静止初始化需要检测imu的跳变过程:
其中包含两个状态:静止状态、跳变状态
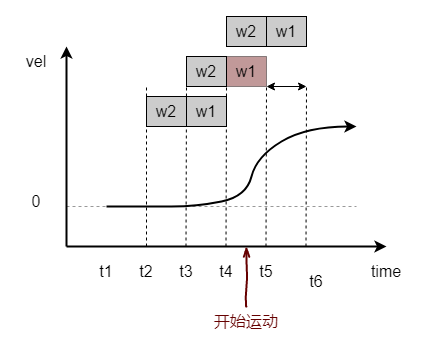
通过设定一个阈值[_imu_excite_threshold],可以判断imu是否得到足够的激励,从得到运动激励前的一段静止状态下的imu测量值,根据静止状态测量值,估算出imu初始化参数。
主要步骤:
- 将imu数据按固定时间的窗口(0.5s - 2s)划分
- 求最新的窗口w1 中imu加速度的方差 a_var,判断是否出现"跳变"
- 若a_var1 < imu激励阈值,则说明窗口w1是一段静止状态,返回false;
若a_var1 >= imu激励阈值,则说明窗口w1出现跳变,下步4 -> 对第二近的窗口w2进行判断 - 若a_var2 < imu激励阈值,则使用w2窗口的imu数据进行系统初始化;
计算窗口w2的平均加速度与角速度 以及方差. - 静止初始化求出重力方向(gravity direction)、初始速度(initial velocity)、初始位置(initial position)、加速度计以及陀螺仪biases (accelerometer and gyroscope biases)
代码框图如下:
二.理论公式
step1:计算初始旋转矩阵
窗口w2的加速度计平均值 : am2_avg
窗口w2的陀螺仪平均值 : wm2_avg
因为,在世界系下,静止时的加速度测量值为(0,0,g)
将窗口w2的am2_avg除以其模长,得到平均加速度的方向(单位向量),即为世界系z轴的方向在imu坐标系上的投影:
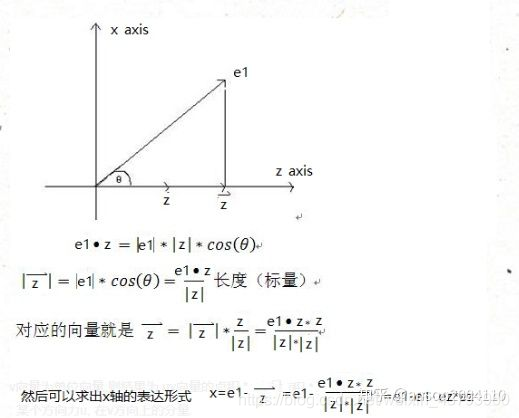
确定z轴方向后,通过施密特正交化构建单位坐标系。
假设,e1为imu系的xi轴对应的单位方向向量:

将xi轴投影到 zw-xw平面,求出xw轴在imu坐标系下的方向向量:

y轴方向由x轴和z轴叉乘得到:

通过上述步骤,得到了从世界系w到imu坐标系的初始旋转 Rwi=[x y z]
step2:计算陀螺仪bias:
静止时刻的陀螺仪理想测量值(角速度)应该为0,因此陀螺仪的bias即窗口w2陀螺仪数据的平均值 [wm2_avg]
step3:计算加速度计bias:
静止时的加速度计bias为加速度平均值与实际重力加速度的差:

g为世界系下的重力加速度,R为第一步求出来的旋转矩阵,将重力矢量从世界系投影到imu坐标系下。
三.相关代码
在 feed_measurement_stereo/feed_measurement_monocular 过程中调用初始化函数try_to_initialize()
bool VioManager::try_to_initialize() {
// Returns from our initializer
double time0;
Eigen::Matrix<double, 4, 1> q_GtoI0;
Eigen::Matrix<double, 3, 1> b_w0, v_I0inG, b_a0, p_I0inG;
// Try to initialize the system
// We will wait for a jerk if we do not have the zero velocity update enabled
// Otherwise we can initialize right away as the zero velocity will handle the stationary case
bool wait_for_jerk = (updaterZUPT == nullptr);
bool success = initializer->initialize_with_imu(time0, q_GtoI0, b_w0, v_I0inG, b_a0, p_I0inG, wait_for_jerk);
// Return if it failed
if (!success) {
return false;
}
// Make big vector (q,p,v,bg,ba), and update our state
// Note: start from zero position, as this is what our covariance is based off of
Eigen::Matrix<double,16,1> imu_val;
imu_val.block(0,0,4,1) = q_GtoI0;
imu_val.block(4,0,3,1) << 0,0,0;
imu_val.block(7,0,3,1) = v_I0inG;
imu_val.block(10,0,3,1) = b_w0;
imu_val.block(13,0,3,1) = b_a0;
state->_imu->set_value(imu_val) 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5052
5052





 到【灌水乐园】发言
到【灌水乐园】发言







