







坐标系定义:
导航坐标系:东-北-天
载体坐标系:右-前-上
欧拉角定义:3-1-2旋转,(航向角-俯仰角-滚转角);
航向角北偏西为正,范围【-pi pi】;
俯仰角, 运载体抬头时角度定义为正,角度范围-90° ~90° ;
横滚角,运载体向右倾斜时角度定义为正,角度范围-180° ~180°
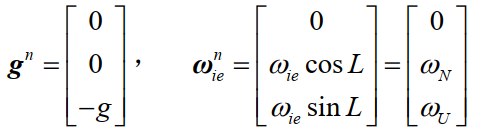
重力矢量和地球自转角速度在地理坐标系下:
一、IMU静止状态
IMU陀螺仪测量三维空间的转动,加速度计测量三维空间的平动;
假定IMU是无误差的,即不存在偏差、比例因子误差、失准角误差、轴间交叉误差为0等,以便于后期数据分析和仿真处理。
当处于静止或者匀速状态下时,北、天向陀螺仪的输出为地球自转角速度分量;天向加速度计测量垂直向下的重力加速度。
1、姿态描述方式:
方向余弦矩阵:
四元数:
载体静止时,加速度计输出和重力加速度矢量之间的关系:
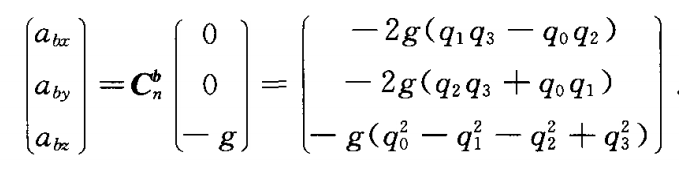
当静止时,(不管IMU处于哪一种姿态/任何姿态下)当前时刻的四元数【q0; q1; q2; q3】,可以由当前四元数求出载体坐标系下的“加速度计”值,;
二、四元数
1、
function q = rotMat2qRichard(R)
vX=R(1,:);
vY=R(2,:);
qX = qUtoV(vX,[1,0,0]);
y= qMultiVec(vY, qX);
qY = qUtoV(y,[0,1,0]);
qx=[-qX(1),qX(2:4)];
qy=[-qY(1),qY(2:4)];
q =qMultiQ(qx,qy);
end
2、直角坐标系的变换姿态阵
b为导航坐标系;a为载体坐标系:
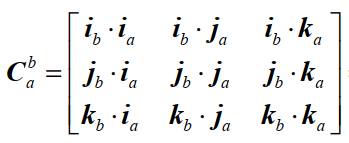
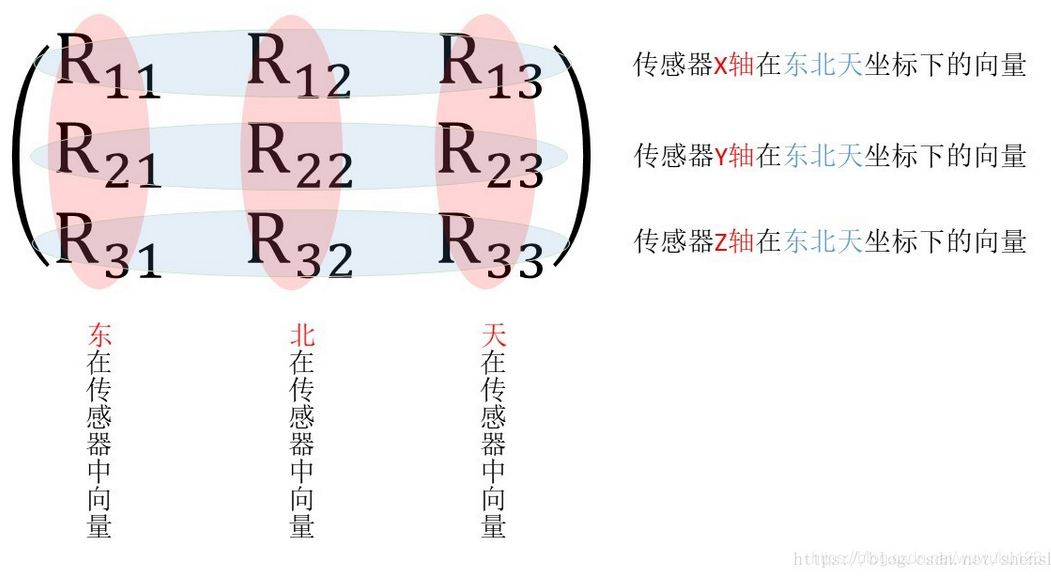
从中可以看出:
Cba中,1、2、3行向量分别为传感器/IMU在东、北、天坐标系下的分量;
Cba中,1、2、3列向量分别为东、北、天在传感器中的分量;
三、延迟
IMU输出原始加速度计、陀螺仪信息,当我们在做AHRS的时候,一般会将数据进行“滤波”处理,比如常见的滑窗滤波、高通、低通滤波等;对于输出的角度值,有时候会有延迟,画出角度曲线图,可以看出参考值、计算值相比,计算值/姿态角会存在滞后现象。

细节图:


















 4237
4237

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









