







一、理论基础
1、寄生-捕食算法
文献[1]提出了一种新的元启发式优化方法—寄生-捕食算法(Parasitism-Predation Algorithm, PPA),该算法在乌鸦-布谷鸟-猫系统模型中模拟捕食者(猫)、寄生虫(布谷鸟)和宿主(乌鸦)之间的相互作用,以克服大数据的低收敛性和维数诅咒的问题。
(1)初始化
通过获得 n n n个最佳鸟巢,评估所有新的解决方案以解决 d d d维优化问题,如下所示: X i n e w = X i min + r 1 ( X i max − X i min ) (1) X_i^{new}=X_i^{\min}+r_1(X_i^{\max}-X_i^{\min})\tag{1} Xinew=Ximin+r1(Ximax−Ximin)(1)其中, X i n e w X_i^{new} Xinew是初始解( i = 1 , 2 , … , n i=1,2,\ldots,n i=1,2,…,n), X i min X_i^{\min} Ximin是下限, X i max X_i^{\max} Ximax是上限, r 1 r_1 r1是从0到1之间的均匀分布中提取的随机变量。
(2)筑巢阶段(鸟窝)
初始化后,优化算法将进入筑巢阶段、寄生阶段和捕食阶段。一开始,随着时间的推移,猫减少了乌鸦的数量。通过模拟乌鸦飞行的两种状态来评估筑巢阶段。第一种状态是通过生成随机候选乌鸦,为乌鸦
i
i
i生成一个新位置,如下所示:
X
i
t
+
1
=
X
i
t
+
F
(
X
r
1
−
X
i
t
)
∀
i
∈
n
c
r
o
w
(2)
X_i^{t+1}=X_i^t+F(X_{r_1}-X_i^t)\quad\forall i\in n_{crow}\tag{2}
Xit+1=Xit+F(Xr1−Xit)∀i∈ncrow(2)其中,
r
1
r_1
r1是一个随机指数,
F
F
F是一个Levy飞行步长,它是基于
∝
\propto
∝稳定分布计算的,具有使用不同步长跨越大尺度距离的能力。
L
e
v
y
(
σ
,
μ
)
Levy(\sigma,\mu)
Levy(σ,μ)分布的简单版本密度是:
f
(
q
)
=
γ
2
π
1
(
q
−
μ
)
3
/
2
exp
(
−
σ
2
(
q
−
μ
)
)
0
<
μ
<
q
<
∞
(3)
f(q)=\sqrt{\frac{\gamma}{2\pi}}\frac{1}{(q-\mu)^{3/2}}\exp\left(-\frac{\sigma}{2(q-\mu)}\right)\quad 0<\mu<q<\infty\tag{3}
f(q)=2πγ(q−μ)3/21exp(−2(q−μ)σ)0<μ<q<∞(3)使用蒙特卡洛算法生成具有与Levy飞行相同行为的随机样本
L
i
L_i
Li,用于模拟
∝
\propto
∝稳定分布:
L
i
∼
s
t
e
p
⊕
L
e
v
y
(
∝
)
∼
0.01
u
∣
y
∣
1
/
α
(4)
L_i\sim step\oplus Levy(\propto)\sim0.01\frac{u}{|y|^{1/\alpha}}\tag{4}
Li∼step⊕Levy(∝)∼0.01∣y∣1/αu(4)其中,
s
t
e
p
step
step是与问题规模相关的缩放系数,
u
=
N
(
0
,
σ
u
2
)
u=N(0,\sigma_u^2)
u=N(0,σu2)和
y
=
N
(
0
,
σ
y
2
)
y=N(0,\sigma_y^2)
y=N(0,σy2)分别是满足
σ
u
=
[
Γ
(
1
+
α
)
sin
(
π
α
/
2
)
Γ
(
(
1
+
α
)
/
2
)
α
2
(
α
−
1
)
/
2
]
1
/
α
,
σ
y
=
1
\sigma_u=\left[\frac{\Gamma(1+\alpha)\sin(\pi\alpha/2)}{\Gamma((1+\alpha)/2)\alpha2^{(\alpha-1)/2}}\right]^{1/\alpha},\,\,\sigma_y=1
σu=[Γ((1+α)/2)α2(α−1)/2Γ(1+α)sin(πα/2)]1/α,σy=1的正态分布,
⊕
\oplus
⊕表示矢量乘法。
在筑巢阶段,通过Levy飞行过程,利用当前最佳巢群更新解,发现鸟窝。Levy飞行已经在许多物种中被观察到,这是一种随机游走。Levy飞行的步长由重尾概率分布控制,通常称为Levy分布。Levy飞行在搜索空间的探索上优于均匀随机分布,因此用它代替均匀随机运动来模拟陷入局部最优、过早收敛的规避行为,提高整体搜索空间的探索能力。第二步是通过重新初始化被违反的维度,从之前的状态修改被违反的维度,如下所示:
X
i
,
o
u
t
n
e
w
=
X
i
,
o
u
t
min
+
(
X
i
,
o
u
t
max
−
X
i
,
o
u
t
min
)
r
a
n
d
[
0
,
1
]
∀
o
u
t
∈
v
i
o
l
a
t
e
d
d
i
m
e
n
s
i
o
n
(5)
X_{i,out}^{new}=X_{i,out}^{\min}+\left(X_{i,out}^{\max}-X_{i,out}^{\min}\right)rand[0,1]\quad\forall\,\,out\in violateddimension\tag{5}
Xi,outnew=Xi,outmin+(Xi,outmax−Xi,outmin)rand[0,1]∀out∈violateddimension(5)重新初始化“呈现总体的随机变化,以获得增强的探索和增强搜索空间的多样性。这一阶段被设计为纯粹的探索阶段,在第一种状态下使用Levy飞行,提供在整个搜索空间中散布乌鸦的高能力。此外,超出边界外的维度都要受到约束。
(3)寄生阶段(乌鸦-布谷鸟)
一开始,当捕食效率较低时,猫会将布谷鸟赶尽杀绝;捕食效率高时,导致布谷鸟灭绝。布谷鸟的效率被假定为弱/中等,而猫的效率则降低了。在此阶段,将部分乌鸦卵(宿主)替换为布谷鸟卵,布谷鸟卵与乌鸦卵相似,被发现的可能性较小。此外,根据适应度值选择被寄生的巢,巢越好,被寄生的几率越大。构建新的巢穴来取代一些巢穴,并以概率
p
a
p_a
pa发现一小部分较差的巢穴。布谷鸟的新巢可以通过下式得到:
X
i
,
n
e
w
c
u
c
k
o
o
=
X
i
,
o
l
d
c
u
c
k
o
o
+
S
G
⋅
k
(6)
X_{i,new}^{cuckoo}=X_{i,old}^{cuckoo}+S_G\cdot k\tag{6}
Xi,newcuckoo=Xi,oldcuckoo+SG⋅k(6)
S
G
=
(
X
r
2
−
X
r
3
)
r
a
n
d
[
0
,
1
]
(7)
S_G=(X_{r_2}-X_{r_3})rand[0,1]\tag{7}
SG=(Xr2−Xr3)rand[0,1](7)其中,
X
i
,
o
l
d
c
u
c
k
o
o
X_{i,old}^{cuckoo}
Xi,oldcuckoo是通过轮盘赌选择的个体;
S
G
S_G
SG是均匀高斯分布步长;
k
k
k定义为二进制矩阵,计算如下:
k
=
r
a
n
d
[
0
,
1
]
>
p
a
(8)
k=rand[0,1]>p_a\tag{8}
k=rand[0,1]>pa(8)其中,
p
a
p_a
pa是由
t
/
2
T
t/2T
t/2T或
g
/
2
G
g/2G
g/2G给出的递增因子,其中
T
T
T或
G
G
G是最大迭代次数,
t
t
t或
g
g
g是当前迭代次数。采用二元矩阵
k
k
k尽可能保留老布谷鸟的相当部分,保留探索搜索空间。寄生阶段开始时,矩阵
k
k
k被1填充。然后,增加其价值以改善种群。
由于布谷鸟分泌的驱虫剂,寄生鸟巢被捕食的可能性要小得多。在鸟巢内,有布谷鸟雏鸟的鸟会有更少的乌鸦。根据捕食的压力有多大,这种过程产生的平衡影响范围基本上是从寄生到筑巢。
(4)捕食阶段(乌鸦-猫)
一开始,强大的捕食效率导致猫和乌鸦的爆炸性增长减少,无法为布谷鸟提供足够的生存资源,因此布谷鸟灭绝。这个阶段基于猫的追踪模式,可以是乌鸦-猫阶段。不需要执行搜索模式,因为猫知道空的搜索空间并且不需要搜索。在这个阶段,布谷鸟雏鸟会释放出排斥猫的排斥性化合物。猫追踪巢穴时,臭味分泌物很少,而不是被布谷鸟占据,并随机选择非寄生巢穴作为追踪模式。一旦猫开始追踪猎物,它们就会根据自己的速度在各个维度上移动。猫的强捕食效率导致猫的爆炸性增长,乌鸦和杜鹃的低增长。该阶段包括三个步骤:
步骤1:更新各个维度的速度如下:
v
k
,
d
=
v
k
,
d
+
r
.
c
.
(
x
b
e
s
t
,
d
−
x
k
,
d
)
,
d
=
1
,
2
,
⋯
,
M
(9)
v_{k,d}=v_{k,d}+r.c.(x_{best,d}-x_{k,d}),\quad d=1,2,\cdots,M\tag{9}
vk,d=vk,d+r.c.(xbest,d−xk,d),d=1,2,⋯,M(9)其中,
v
k
,
d
v_{k,d}
vk,d表示
c
a
t
k
cat_k
catk第
d
d
d维上的速度,
x
b
e
s
t
,
d
x_{best,d}
xbest,d是具有最佳适应值的猫的位置,
x
k
,
d
x_{k,d}
xk,d是
c
a
t
k
cat_k
catk的位置,
c
c
c是常数,
r
r
r是
[
0
,
1
]
[0,1]
[0,1]范围内的随机值。
步骤2:检查更新速度是否超过最大速度范围。在新速度大于最大速度的情况下,它被设置为等于极限(速度极限被修改为从1线性下降到0.25)
步骤3:更新
c
a
t
k
cat_k
catk的位置如下:
x
k
,
d
=
x
k
,
d
+
v
k
,
d
(10)
x_{k,d}=x_{k,d}+v_{k,d}\tag{10}
xk,d=xk,d+vk,d(10)
2、PPA算法伪代码
PPA算法的伪代码如图1所示。

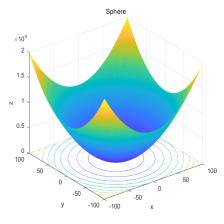
二、仿真实验与结果分析
对PPA算法单独实验,以常用23个测试函数中的F3、F4(单峰函数/30维)、F9、F10(多峰函数/30维)、F20、F21(固定维度多峰函数/6维、4维)为例,实验设置种群规模为30,最大迭代次数为1000,每种算法独立运算30次,结果显示如下:






函数:F3
PPA:best: 128.2791, worst: 2096.902, mean: 564.3674, std: 369.7015
函数:F4
PPA:best: 25.5105, worst: 51.9664, mean: 37.5791, std: 6.8245
函数:F9
PPA:best: 36.8724, worst: 121.3954, mean: 70.894, std: 22.0422
函数:F10
PPA:best: 9.6145, worst: 16.0049, mean: 12.8844, std: 1.6332
函数:F20
PPA:best: -3.322, worst: -3.1164, mean: -3.2602, std: 0.074985
函数:F21
PPA:best: -10.1532, worst: -2.2426, mean: -6.8288, std: 3.0824
实验结果表明:PPA算法在求解优化问题上具有良好的性能。
三、参考文献
[1] Al-Attar A. Mohamed, S.A. Hassan, A.M. Hemeida, et al. Parasitism – Predation algorithm (PPA): A novel approach for feature selection[J]. Ain Shams Engineering Journal, 2020, 11: 293-308.

















 448
448

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











