







 本文介绍了基于MSP430F5529单片机的红外循迹小车设计,包括小车的功能(如从A点出发到B点停止或沿跑道行驶),设计方案(使用TCRT5000模块和TB6612电机驱动模块),电路设计,接线详解,以及模式控制。代码设计部分提供了模式切换的实现方式,并承诺提供免费的技术支持。
本文介绍了基于MSP430F5529单片机的红外循迹小车设计,包括小车的功能(如从A点出发到B点停止或沿跑道行驶),设计方案(使用TCRT5000模块和TB6612电机驱动模块),电路设计,接线详解,以及模式控制。代码设计部分提供了模式切换的实现方式,并承诺提供免费的技术支持。
实现功能
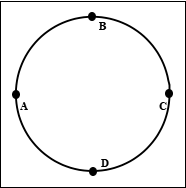
第一功能:小车从A点开始出发,行驶到B点停止。
第二功能:小车从A点开始出发,然后沿跑道一直行驶。
下图为黑色跑道,跑道为2mm的黑线,A、B、C、D四点为直径4mm的黑圈。
设计方案
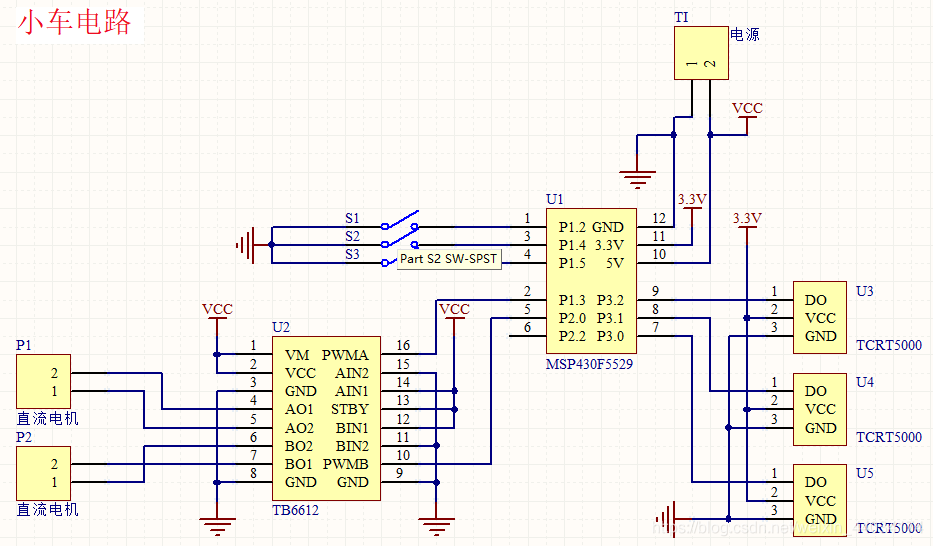
小车选用MSP430F5529做为主控芯片,TCRT5000红外循迹模块用来实现小车识别跑道功能,原理为红外发射判断黑白线以及区分黑线宽度,电机使用两个直流电机,电机驱动模块选用TB6612,来实现实时控制电机转动的幅度与转速。
设计电路
接线详解
将MSP430F5529的P3.0、P3.1、P3.2引脚分别与3个TCRT5000模块的DO端相连,芯片实时检测这3个端口的电平,当发生电平跳变时,电机运行就会做出相对应的调整,而控制电机转速的是P1.3与P2.0引脚,它们与TB6612模块的PWMA、PWMB引脚相连,原理是通过改变占空比来实现。P1.2、P1.4、P1.5三个引脚通过拨码开关与GND相连,用来实现对三个行驶模式的分开控制。
模式详解
三个拨码开关分别控制三个模式,第一个模式为第一个实现功能即B点停,第二
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 439
439

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









