







Clake变换我们一般选择等幅值变换
( V α V β ) = 2 3 ( 1 − 1 2 − 1 2 0 3 2 − 3 2 ) ( V a V b V c ) (式6) \left(\begin{array}{c}V_{\alpha} \\V_{\beta}\end{array}\right)=\frac{2}{3}\left(\begin{array}{ccc}1 & -\frac{1}{2} & -\frac{1}{2} \\0 & \frac{\sqrt{3}}{2} & -\frac{\sqrt{3}}{2}\end{array}\right)\left(\begin{array}{c}V_{a} \\V_{b} \\V_{c}\end{array}\right)\tag{式6} (VαVβ)=32(10−2123−21−23)⎝ ⎛VaVbVc⎠ ⎞(式6)
即从abc坐标系变换到alpha-beta坐标系
之后我们通过将alpha-beta坐标系变换到dq坐标系就会发现,变换有很多种,比如matlab的Alpha-Beta-Zero to dq模块,有两种变换方式:90 degree behind phase A axis和Aligned with phase A axis,两者之间有什么区别?
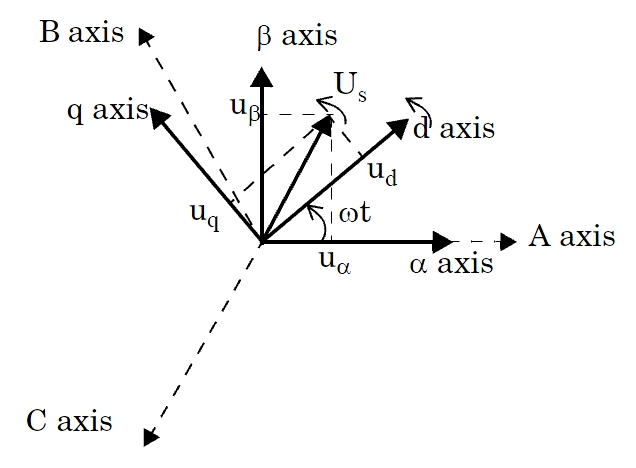
Aligned with phase A axis
When the rotating frame is aligned with A axis, the following relations are obtained:
当模块选择Aligned with phase A axis时,变换的公式为:
- 正变换(基于余弦)
[ u d u q u 0 ] = [ cos ( ω t ) sin ( ω t ) 0 − sin ( ω t ) cos ( ω t ) 0 0 0 1 ] [ u a u β u 0 ] \left[\begin{array}{l} u_d \\ u_q \\ u_0 \end{array}\right]=\left[\begin{array}{ccc} \cos (\omega t) & \sin (\omega t) & 0 \\ -\sin (\omega t) & \cos (\omega t) & 0 \\ 0 & 0 & 1 \end{array}\right]\left[\begin{array}{c} u_a \\ u_\beta \\ u_0 \end{array}\right] ⎣ ⎡uduqu0⎦ ⎤=⎣ ⎡cos(ωt)−sin(ωt)0sin(ωt)cos(ωt)0001⎦ ⎤⎣ ⎡uauβu0⎦ ⎤
\left[\begin{array}{l}
u_d \\
u_q \\
u_0
\end{array}\right]=\left[\begin{array}{ccc}
\cos (\omega t) & \sin (\omega t) & 0 \\
-\sin (\omega t) & \cos (\omega t) & 0 \\
0 & 0 & 1
\end{array}\right]\left[\begin{array}{c}
u_a \\
u_\beta \\
u_0
\end{array}\right]
- 逆变换(基于余弦)
[ u α u β u 0 ] = [ cos ( ω t ) − sin ( ω t ) 0 sin ( ω t ) cos ( ω t ) 0 0 0 1 ] [ u d u q u 0 ] \left[\begin{array}{c} u_\alpha \\ u_\beta \\ u_0 \end{array}\right]=\left[\begin{array}{ccc} \cos (\omega t) & -\sin (\omega t) & 0 \\ \sin (\omega t) & \cos (\omega t) & 0 \\ 0 & 0 & 1 \end{array}\right]\left[\begin{array}{l} u_d \\ u q \\ u_0 \end{array}\right] ⎣ ⎡uαuβu0⎦ ⎤=⎣ ⎡cos(ωt)sin(ωt)0−sin(ωt)cos(ωt)0001⎦ ⎤⎣ ⎡uduqu0⎦ ⎤
\left[\begin{array}{c}
u_\alpha \\
u_\beta \\
u_0
\end{array}\right]=\left[\begin{array}{ccc}
\cos (\omega t) & -\sin (\omega t) & 0 \\
\sin (\omega t) & \cos (\omega t) & 0 \\
0 & 0 & 1
\end{array}\right]\left[\begin{array}{l}
u_d \\
u q \\
u_0
\end{array}\right]
90 degree behind phase A axis
- 正变换公式
[ u d u q u 0 ] = [ sin ( ω t ) − cos ( ω t ) 0 cos ( ω t ) sin ( ω t ) 0 0 0 1 ] [ u a u β u 0 ] \left[\begin{array}{l} u_d \\ u_q \\ u_0 \end{array}\right]=\left[\begin{array}{ccc} \sin (\omega t) & -\cos (\omega t) & 0 \\ \cos (\omega t) & \sin (\omega t) & 0 \\ 0 & 0 & 1 \end{array}\right]\left[\begin{array}{c} u_a \\ u_\beta \\ u_0 \end{array}\right] ⎣ ⎡uduqu0⎦ ⎤=⎣ ⎡sin(ωt)cos(ωt)0−cos(ωt)sin(ωt)0001⎦ ⎤⎣ ⎡uauβu0⎦ ⎤
\left[\begin{array}{l}
u_d \\
u_q \\
u_0
\end{array}\right]=\left[\begin{array}{ccc}
\sin (\omega t) & -\cos (\omega t) & 0 \\
\cos (\omega t) & \sin (\omega t) & 0 \\
0 & 0 & 1
\end{array}\right]\left[\begin{array}{c}
u_a \\
u_\beta \\
u_0
\end{array}\right]
- 逆变换公式
[ u α u β u 0 ] = [ sin ( ω t ) cos ( ω t ) 0 − cos ( ω t ) sin ( ω t ) 0 0 0 1 ] [ u d u q u 0 ] \left[\begin{array}{c} u_\alpha \\ u_\beta \\ u_0 \end{array}\right]=\left[\begin{array}{ccc} \sin (\omega t) & \cos (\omega t) & 0 \\ -\cos (\omega t) & \sin (\omega t) & 0 \\ 0 & 0 & 1 \end{array}\right]\left[\begin{array}{l} u_d \\ u q \\ u_0 \end{array}\right] ⎣ ⎡uαuβu0⎦ ⎤=⎣ ⎡sin(ωt)−cos(ωt)0cos(ωt)sin(ωt)0001⎦ ⎤⎣ ⎡uduqu0⎦ ⎤
\left[\begin{array}{c}
u_\alpha \\
u_\beta \\
u_0
\end{array}\right]=\left[\begin{array}{ccc}
\sin (\omega t) & \cos (\omega t) & 0 \\
-\cos (\omega t) & \sin (\omega t) & 0 \\
0 & 0 & 1
\end{array}\right]\left[\begin{array}{l}
u_d \\
u q \\
u_0
\end{array}\right]
这里列出来,方便自己使用,也是方便其他科研人员回忆公式。















 1195
1195











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









