







J d ω d t = T m − T e − D P ( ω − ω 0 ) ≈ P m ω 0 − P e ω 0 − D P ( ω − ω 0 ) J \frac{\mathrm{~d} \omega}{\mathrm{~d} t}=T_m-T_e-D_P\left(\omega-\omega_0\right) \approx \frac{P_m}{\omega_0}-\frac{P_e}{\omega_0}-D_P\left(\omega-\omega_0\right) J dt dω=Tm−Te−DP(ω−ω0)≈ω0Pm−ω0Pe−DP(ω−ω0)
很多文章都没有阐述惯量和阻尼的单位和标幺化,这里给出结论,方便科研人员使用。
在该公式中, J J J 和 D p D_p Dp 的物理意义如下:
-
J J J 表示惯性常数,单位是 kg ⋅ m 2 \text{kg} \cdot \text{m}^2 kg⋅m2。
- 它描述了系统的惯性特性,是转子质量及其几何尺寸的函数。其单位体现了力矩作用下转子角速度的变化。
-
D p D_p Dp 表示阻尼系数,单位是 N ⋅ m ⋅ s/rad \text{N} \cdot \text{m} \cdot \text{s/rad} N⋅m⋅s/rad 或者也可以理解为 kg ⋅ m 2 ⋅ s − 1 \text{kg} \cdot \text{m}^2 \cdot \text{s}^{-1} kg⋅m2⋅s−1。
- 它描述了系统在转速偏差下所产生的阻尼力矩,通常用于表征电机或电力系统中的阻尼效应。单位体现了与角速度成正比的阻尼力矩。
对于标幺化这两个参数的过程,可以按照以下步骤进行:
1. 惯性常数 J J J 的标幺化
- 选择基准惯量 J base J_{\text{base}} Jbase,通常可以通过系统的基准功率和基准角速度来确定。
- 惯性常数的标幺化公式为:
J pu = J J base J_{\text{pu}} = \frac{J}{J_{\text{base}}} Jpu=JbaseJ
- 通常情况下,基准惯量 J base J_{\text{base}} Jbase 与系统的基准功率和基准角速度的平方成正比:
J base = P base ω 0 2 J_{\text{base}} = \frac{P_{\text{base}}}{\omega_0^2} Jbase=ω02Pbase
其中 P base P_{\text{base}} Pbase 是系统的基准功率, ω 0 \omega_0 ω0 是基准角速度。
2. 阻尼系数 D p D_p Dp 的标幺化
- 选择基准阻尼系数 D p , base D_{p,\text{base}} Dp,base,通常可以选择基准功率与基准角速度的比值:
D p , base = P base ω 0 D_{p,\text{base}} = \frac{P_{\text{base}}}{\omega_0} Dp,base=ω0Pbase
- 阻尼系数的标幺化公式为:
D p , pu = D p D p , base D_{p,\text{pu}} = \frac{D_p}{D_{p,\text{base}}} Dp,pu=Dp,baseDp
通过这种方式,惯性常数和阻尼系数都可以转化为与系统基准条件相关的标幺量,从而简化分析和计算。标幺化的好处是可以去掉系统参数的单位,使得不同规模系统的分析结果更具有普适性和可比较性。
更正
J
d
ω
d
t
=
T
m
−
T
e
−
D
P
(
ω
−
ω
0
)
≈
P
m
ω
0
−
P
e
ω
0
−
D
P
(
ω
−
ω
0
)
J \frac{\mathrm{~d} \omega}{\mathrm{~d} t}=T_m-T_e-D_P\left(\omega-\omega_0\right) \approx \frac{P_m}{\omega_0}-\frac{P_e}{\omega_0}-D_P\left(\omega-\omega_0\right)
J dt dω=Tm−Te−DP(ω−ω0)≈ω0Pm−ω0Pe−DP(ω−ω0)
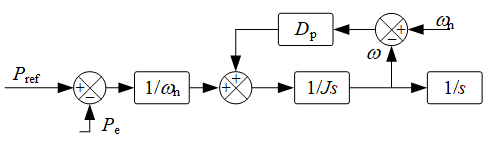
根据转自运动方程的框图,可以知道Dp的输出是转矩,基准值为P0/ω0,输入是Δω,基准值为ω0;因此Dp的基准值为P0/ω0/ω0;即
D p , base = P base ω 0 2 D_{p,\text{base}} = \frac{P_{\text{base}}}{\omega_0^2} Dp,base=ω02Pbase
对于惯量来说,1/J,输出是ω,基准值为ω0,输入是转矩,基准值为P0/ω0,因此J的基准值为:
J base = P base ω 0 2 J_{\text{base}} = \frac{P_{\text{base}}}{\omega_0^2} Jbase=ω02Pbase
因此Dp和J的基准值是一样的,都是:
P base ω 0 2 \frac{P_{\text{base}}}{\omega_0^2} ω02Pbase



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











