









VS2019配置opencv3.4.1及opencv_contrib3.4.1
最近在做毕业设计,想用opencv里的SIFT,发现需要把OpenCV的扩展模块中的xfeatures给包含进来,所以需要安装拓展模块opencv_contrib,很痛苦。
《配库》
当我写代码的时候
我觉得
世上最痛苦的事是写代码
当我写论文的时候
我觉得
世上最痛苦的事是写论文
当我配库的时候
我才知道
世上最痛苦的事
是配库
更新!!!!
sift专利到期了,如果想用sift,opencv4.5之后可以不用配置附属库了
1.准备
1.visual studio2019
2.opencv3.4.1源码
3.opencv_contrib3.4.1(需要和opencv版本一致)
下载链接:https://github.com/opencv/opencv_contrib
4.cmake
2.步骤
1.新建一个opencv-build文件夹,打开cmake,先填好下面两个路径:

然后开始Configure,之后会发现有一片红的
问题不大,再点一次configure,就会全部变白了
2.这时候,找到OPENCV_EXTRA_MODULES_PATH,填入拓展模块opencv_contrib里的modules文件夹的路径,并勾选OPENCV_ENABLE_NONFREE(否则没法使用SIFT),如下图:

3.勾选BUILD_opencv_world,在调用dll时,只调用这一个就行了,不用根据功能选择了

此时,再进行Configure,不幸的是,我遇到了一点问题,camke下面有一片红,提示以下这些东西没下载成功,那就自己下载下来放进相应的路径里面。
在网上找到的资源:
百度云链接:https://pan.baidu.com/s/1BeYF8kqEZLAJYQj-MvxpmA
提取码:e1wc
下载后拷贝到opencv_contrib/modules/xfeatures2d/src路径下,然后再次Configure,这时他还是在提示下载失败,不管它,如果没有其他问题,就点击Generate.
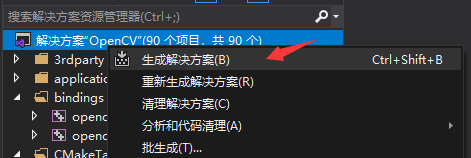
4.Generate Done之后,点击Open Project,就可以在VS中打开工程。选择平台为DebugX64,右键解决方案,选择生成解决方案,等待时间较长。
5.又遇到了问题,出现了错误

于是呢,双击这个错误,就可以跳转到对应的文件中,找到# include "opencv2/xfeatures2d/cuda.hpp"语句,并将其改为绝对路径:# include “D:/AppPath/opencv/opencv_contrib-3.4.12/modules/xfeatures2d/include/opencv2/xfeatures2d/cuda.hpp”

6.然后呢,又出现了另一个问题,累了

解决方法参考:https://blog.csdn.net/caomin1hao/article/details/80388136
当然你也可以不管它,我就没管,因为我此时已经游走在放弃的边缘了。
7.右键选择CMakeTargets,选择仅生成INSTALL
生成成功。
8.更改环境变量

9.新建vs项目,在项目属性,包含目录中,添加
库目录中添加

链接器-输入中添加

10.好了,结束了,找个测试用例试一下。
3.测试用例
#include <iostream>
#include <opencv2\opencv.hpp>
#include <opencv2\xfeatures2d.hpp>
using namespace std;
using namespace cv;
using namespace cv::xfeatures2d;
int main()
{
Mat firstImage = imread("26.jpg");
Mat secondImage = imread("27.jpg");
if (firstImage.empty() || secondImage.empty())
{
cout << "error" << endl;
return 0;
}
//resize(firstImage,firstImage,Size(800,1000),0,0,1);
//resize(secondImage,secondImage,Size(800,1000),0,0,1);
//第一步:获取SIFT特征
//difine a sift detector
Ptr<SIFT> sift = SIFT::create();
//sift->detect();
//SiftFeatureDetector siftDetector;
//store key points
vector<KeyPoint> firstKeypoint, secondKeypoint;
//detect image with SIFT,get key points
sift->detect(firstImage, firstKeypoint);
sift->detect(secondImage, secondKeypoint);
Mat firstOutImage, secondOutImage;
//draw key points at the out image and show to the user
drawKeypoints(firstImage, firstKeypoint, firstOutImage, Scalar(255, 0, 0));
drawKeypoints(secondImage, secondKeypoint, secondOutImage, Scalar(0, 255, 0));
imshow("first", firstOutImage);
imshow("second", secondOutImage);
Mat firstDescriptor, secondDescriptor;
sift->compute(firstImage,firstKeypoint,firstDescriptor);
sift->compute(secondImage,secondKeypoint,secondDescriptor);
Ptr<DescriptorMatcher > matcher = DescriptorMatcher::create("BruteForce");
Mat masks;
vector<DMatch> matches;
matcher->match(firstDescriptor, secondDescriptor, matches, masks);
//第二步:RANSAC方法剔除outliner
Mat matcheImage;
//将vector转化成Mat
Mat firstKeypointMat(matches.size(), 2, CV_32F), secondKeypointMat(matches.size(), 2, CV_32F);
for (int i = 0; i<matches.size(); i++)
{
firstKeypointMat.at<float>(i, 0) = firstKeypoint[matches[i].queryIdx].pt.x;
firstKeypointMat.at<float>(i, 1) = firstKeypoint[matches[i].queryIdx].pt.y;
secondKeypointMat.at<float>(i, 0) = secondKeypoint[matches[i].trainIdx].pt.x;
secondKeypointMat.at<float>(i, 1) = secondKeypoint[matches[i].trainIdx].pt.y;
}
//Calculate the fundamental Mat;
vector<uchar> ransacStatus;
Mat fundamentalMat = findFundamentalMat(firstKeypointMat, secondKeypointMat, ransacStatus, FM_RANSAC);
cout << fundamentalMat << endl;
//Calculate the number of outliner points;
int outlinerCount = 0;
for (int i = 0; i<matches.size(); i++)
{
if (ransacStatus[i] == 0)
{
outlinerCount++;
}
}
//Calculate inliner points;
vector<Point2f> firstInliner;
vector<Point2f> secondInliner;
vector<DMatch> inlinerMatches;
int inlinerCount = matches.size() - outlinerCount;
firstInliner.resize(inlinerCount);
secondInliner.resize(inlinerCount);
inlinerMatches.resize(inlinerCount);
int index = 0;
for (int i = 0; i<matches.size(); i++)
{
if (ransacStatus[i] != 0)
{
firstInliner[index].x = firstKeypointMat.at<float>(i, 0);
firstInliner[index].y = firstKeypointMat.at<float>(i, 1);
secondInliner[index].x = secondKeypointMat.at<float>(i, 0);
secondInliner[index].y = secondKeypointMat.at<float>(i, 1);
inlinerMatches[index].queryIdx = index;
inlinerMatches[index].trainIdx = index;
index++;
}
}
vector<KeyPoint> inlinerFirstKeypoint(inlinerCount);
vector<KeyPoint> inlinerSecondKeypoint(inlinerCount);
KeyPoint::convert(firstInliner, inlinerFirstKeypoint);
KeyPoint::convert(secondInliner, inlinerSecondKeypoint);
//cout<<fundamentalMat<<endl;
//select 50 keypoints
//matches.erase(matches.begin()+50,matches.end());
//inlinerMatches.erase(inlinerMatches.begin()+50,inlinerMatches.end());
drawMatches(firstImage, inlinerFirstKeypoint, secondImage, inlinerSecondKeypoint, inlinerMatches, matcheImage);
imshow("ransacMatches", matcheImage);
drawMatches(firstImage, firstKeypoint, secondImage, secondKeypoint, matches, matcheImage);
imshow("matches", matcheImage);
waitKey(0);
return 0;
}
4. 参考博客
1.https://blog.csdn.net/chentravelling/article/details/59540828?utm_medium=distribute.pc_relevant.none-task-blog-BlogCommendFromMachineLearnPai2-1.control&dist_request_id=&depth_1-utm_source=distribute.pc_relevant.none-task-blog-BlogCommendFromMachineLearnPai2-1.control
2.https://blog.csdn.net/weixin_41695564/article/details/79925379















 7818
7818











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









