






colmap笔记:将模型和影像位姿转换到GPS坐标系下
1.背景和需求
在 COLMAP 中使用 GPS 信息作为先验,可以帮助提高重建的精度和效率,特别是在处理大范围或大尺度的场景时。GPS 信息通常被用来约束相机的位置,使重建过程更加准确。GPS 数据通常以 EXIF 元数据的形式存储在 JPEG 图像中,包含 GPS 坐标(经度、纬度、高度)。如果图像含有 EXIF 数据,COLMAP 会自动识别并读取这些信息。
但在稀疏重建阶段,COLMAP 主要关注于图像之间的相对位置和方向,以及场景中3D点的相对位置。默认情况下,COLMAP 不会使用 EXIF 中的 GPS 数据来定义重建模型的坐标系。因此,重建出的模型是与实际地理位置无关的局部坐标系。
那么现在想要将重建模型转换到地理坐标系(如基于 GPS 的全球坐标系),发现可以在重建完成后使用 model_aligner 工具将重建的模型缩放、平移和旋转,使其与真实世界的地理坐标系对齐。这要求提供包含 GPS 位置信息的参考图像列表。
官方文档的说明如下:
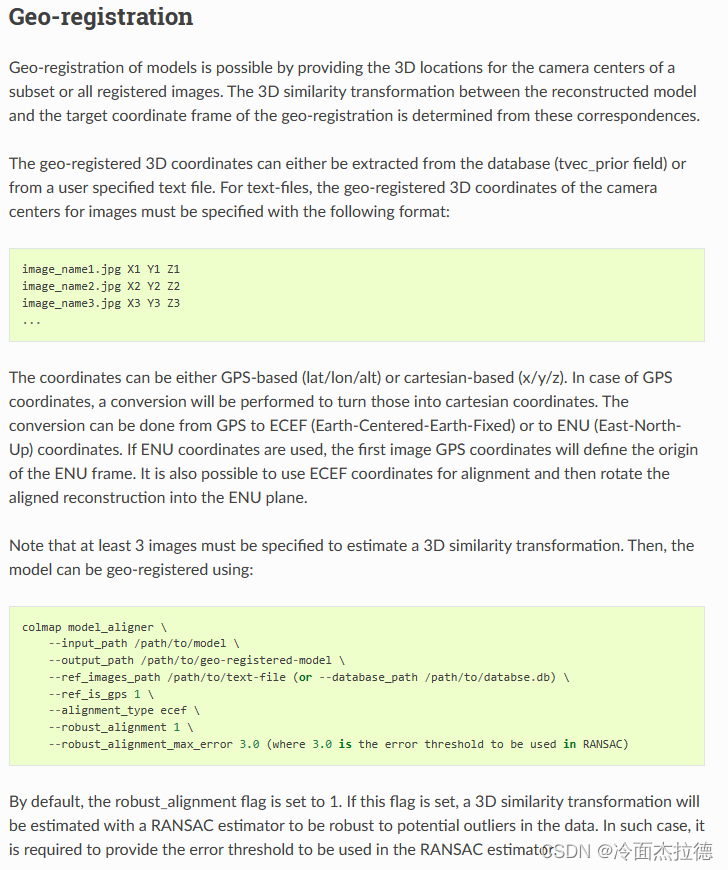
让我来一探究竟。
1.尝试
首先已经用colmap做完了稀疏重建,输出模型,然后进行model_aligner,设置好参数,将新的模型输出到gps文件夹。
colmap model_aligner \
--input_path ./sparse/0 \
--output_path ./sparse/gps \
--database_path ./database.db \
--ref_is_gps 1 \
--alignment_type ecef \
--robust_alignment 1 \
--robust_alignment_max_error 3.0
此时gps文件夹下的images.txt里记录的四元数和平移参数就是新的坐标系下的

根据以下代码,可以将其转换到GPS所在wgs84坐标系下:
import numpy as np
from scipy.spatial.transform import Rotation as R
import pyproj
from pyproj import Proj, transform
#0.016938035523210708 0.58455146147157355 -0.48870579156409283 0.64744060819180593 -129342.74756339534 3469822.8668770161 5343696.2087743161
# 四元数 (QW, QX, QY, QZ)
qw, qx, qy, qz = 0.016938035523210708, 0.58455146147157355, -0.48870579156409283, 0.64744060819180593 # 替换为实际值
# 平移向量 (TX, TY, TZ)
tx, ty, tz = -129342.74756339534, 3469822.8668770161, 5343696.2087743161
# 将四元数转换为旋转矩阵
rotation = R.from_quat([qx, qy, qz, qw])
rotation_matrix = rotation.as_matrix()
# 计算相机中心坐标(ECEF坐标系下)
camera_center = -np.dot(rotation_matrix.T, np.array([tx, ty, tz]))
print("投影中心坐标:(ecef坐标系下)", camera_center)
# 定义坐标转换
# 从ECEF转换到WGS84
ecef = Proj(proj='geocent', ellps='WGS84', datum='WGS84')
wgs84 = Proj(proj='latlong', ellps='WGS84', datum='WGS84')
# 执行转换
lon, lat, alt = transform(ecef, wgs84, camera_center[0],camera_center[1], camera_center[2], radians=False)
# 输出WGS84经纬度坐标
print("经度:", lon, "纬度:", lat, "高度:", alt)
# 从WGS84转换到UTM Zone 50N
utm_zone_50n = Proj(proj="utm", zone=50, ellps='WGS84', datum='WGS84', south=False)
utm_x, utm_y = transform(wgs84, utm_zone_50n, lon, lat)
# 输出UTM坐标
print("WGS84坐标系下:UTM Zone 50N X:", utm_x, "Y:", utm_y,"Z:",alt)
# 将四元数转换为旋转矩阵
rotation = R.from_quat([qx, qy, qz, qw])
rotation_matrix = rotation.as_matrix()
# 将旋转矩阵转换为欧拉角 (Omega, Phi, Kappa)
# 摄影测量中通常使用 ZYX 旋转顺序
omega, phi, kappa = rotation.as_euler('ZYX', degrees=True)
print("旋转矩阵:\n", rotation_matrix)
print("Omega:", omega, "Phi:", phi, "Kappa:", kappa)

















 465
465

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









