







论文链接
YOLO-FNC:An Improved Method for Small Object Detection in Remote Sensing Images Based on YOLOv7
YOLO-FNC:一种基于YOLOv7的遥感图像小目标检测改进方法
0.论文摘要
摘要—遥感图像中小目标的检测算法由于复杂的背景和有限的像素,往往具有挑战性。这可能导致检测精度降低和小目标漏检数量增加。因此,本文提出了一种基于YOLOv7的增强网络YOLOFNC。为了提高模型捕捉小目标特征的能力,设计了一种基于C3模块的增强型C3-Faster模块,并将其集成到YOLOv7网络中。该模块有助于提取更多与小目标相关的特征。此外,我们采用归一化Wasserstein距离(NWD)融合GIoU作为新的损失函数,以优化网络权重和小目标回归框架的精度。同时,在模型的关键位置引入了协调注意力(CA)机制,以减少特征层中的冗余信息,防止重要小目标特征的丢失。我们在DIOR、AI-TOD和VisDrone数据集上进行了YOLO-FNC与其他常用目标检测算法的对比实验。实验结果表明,YOLO-FNC在DIOR数据集上达到了84.4%的mAP,在AI-TOD数据集上达到了35.9%的mAP,在VisDrone数据集上达到了52.6%的mAP。与YOLOv7及其他遥感目标检测模型相比,YOLO-FNC在目标检测中表现出更好的性能。
关键词—小目标检测,遥感图像,深度学习,神经网络,YOLOv7。
1.引言
目标检测是当前计算机视觉和数字信号处理领域的热门研究方向,随着遥感技术的进步,遥感图像中的目标检测在无人机、智能交通监控、航空航天等多个技术领域得到了越来越广泛的应用。因此,研究和解决遥感图像目标检测中的相关问题,对我们未来的科技进步具有重要意义。随着计算能力的提升,许多算法,特别是卷积神经网络,被广泛应用于各种场景。AlexNet在2012年图像分类竞赛中的巨大成功,使得基于深度学习的目标检测成为新的研究热点。在此基础上,许多学者开发了更先进的目标检测模型。目标检测方法大致可以分为两类:基于区域提议的算法和基于回归的算法。前者采用两阶段方法,首先利用区域提议网络识别可能包含目标的区域,然后对每个区域进行分类和定位以完成检测。虽然这些方法精度较高,但模型复杂,检测速度相对较慢。这类方法的代表性模型包括R-FCN和Fast R-CNN系列。后者是基于回归的算法,直接预测目标的类别和位置,一步完成检测任务。YOLO是这类算法中最具代表性的模型。YOLO算法处理速度快、模型体积小、实时性好,但其检测精度通常低于两阶段方法。
许多学者对YOLO系列算法的检测性能进行了显著改进,以提升其检测效果。在YOLO系列算法中,YOLOv3 [8] 是最著名的版本。它采用了多尺度预测、多层次特征融合以及更鲁棒的网络结构,显著提高了检测精度和速度。YOLOv3在许多视觉任务和竞赛中取得了出色的成绩,成为目标检测领域的重要里程碑。值得注意的是,YOLOv4 [9] 也拥有广泛的追随者和影响力,并在某些性能指标上超越了YOLOv3,因此同样受到高度关注。TPH-YOLOv5 [10] 应用了TPH预测头来替代原有的预测头,能够检测不同尺度的目标,在检测小目标方面带来了一些改进。YOLOv5-Aircraft [11] 将缩放校准引入归一化模块,以提高特征的有效性。他们采用Kullback-Leibler作为损失函数,并在开发的模型中引入了CSandGlass模块,以减少信息损失,达到更高的检测精度和速度。YOLO-extract [12] 算法通过移除特征提取能力较低的层和预测头,结合新的特征提取器、坐标注意力机制,并将CIoU损失替换为Focal-EIoU损失,从而加速边界框回归并减少模型损失。YOLOv7 [13] 是一种以速度和精度著称的单阶段目标检测模型。YOLOv7在网络架构中引入了模型重参数化技术,并采用了YOLOv5的跨网格搜索标签分配策略。此外,在骨干网络中使用了E-ELAN高效网络架构。YOLOv7是一种优秀的目标检测算法,但在检测小目标的任务中仍存在一些不足。由于其网络较深,E-ELAN结构未能充分提取小目标的特征,容易丢失部分信息。YOLOv7中应用的GIoU损失函数在检测小目标时表现不佳。因此,YOLOv7在小目标检测方面仍需进一步研究。
我们在现有模型的基础上,使用YOLOv7作为基础进行了增强。首先,我们通过引入C3-Faster模块(基于C3模块和FasterNet[14]模块的改进)增强了YOLOv7网络的特征提取能力。这一改进减少了模型的参数量并简化了结构。其次,我们通过将归一化Wasserstein距离(NWD)[15]和GIoU作为YOLOv7的损失函数,提升了网络对小目标的检测能力,从而提高了对小目标的检测精度。第三,我们在YOLOv7中嵌入了坐标注意力(CA)[16]机制,有效捕捉了通道和空间信息,增强了特征提取能力,提升了目标识别的效果,并使模型能够专注于大规模数据中的关键多尺度局部和全局信息。
2.相关工作
遥感图像的应用正在迅速扩展,目标检测成为研究人员的重点。各种检测算法已被开发,包括传统方法和基于深度学习的方法。传统算法依赖于手动设计的特征,适用于检测单一目标,但在复杂场景中表现不佳[20]。例如,Chen等人[21]使用梯度方向直方图描述进行特征提取以检测车辆。基于YOLOv3,Zhang等人[22]提出了一种深度分离注意力引导网络,用于检测光学遥感图像中的小型车辆。然而,这些方法适合提取浅层特征,难以捕捉深层语义信息。
由于小目标物体体积小、遥感图像中特征不足等问题,算法或模型在检测小目标物体方面的性能仍不尽如人意。为了解决这些问题,研究者们提出了多种局部方法。第一类是基于数据策略的方法,例如多尺度训练[23]和数据增强技术(如mosaic[9])。这些方法可以提升小目标检测能力,但也可能导致计算成本增加。Akyon等人[23]提出了一种基于切片推理和微调的检测框架(SAHI),不仅提高了小目标检测能力,还保持了较高的内存利用率。Kisantal等人[24]提出了对小目标样本进行过采样,随后在样本中复制和粘贴小目标,以提供足够的小目标与锚点匹配,从而提升小目标检测性能。第二类主要是基于特征增强学习的方法。Pei等人[25]基于改进的YOLOv5s网络提出了特征提取模块LCB,并进行了多尺度特征融合以提取遥感图像中的特征。Dao等人[26]提出了一种非对称上下文调制模块,利用上下文信息的交互更好地突出小目标。此外,Rabbi等人[27]提出了一种增强的超分辨率生成对抗网络模型,将图像转换为超分辨率图像并提取特征信息,提高了小目标检测的准确性。第三类是基于样本分配原则的方法。IoU指标在现代基于锚点的检测器中被广泛使用[8, 28, 29],用于在训练期间分配正负样本。然而,小目标检测需要手动仔细设置锚框的大小和宽高比,以确保足够的正样本。Zhang等人[30]根据目标的统计特征对样本进行划分,从而避免了额外的超参数。同时,小目标位置的变化非常敏感,轻微的移动可能会对IoU造成显著干扰,因此Wang等人[15]使用NWD构建了小目标检测器。
在目标检测领域所做出的努力已经取得了显著进展。然而,在遥感图像(RSI)中,小目标检测仍有待提升。为了解决这一问题,我们在YOLOv7网络中引入了C3-Faster模块,该模块专门设计用于增强特征提取、提高推理速度并减少模型参数数量。此外,我们结合了NWD与GIoU损失函数,使网络在检测小目标时更加有效。同时,我们在模型的适当位置引入了CA机制,以捕捉通道和空间信息,从而进一步提升模型的检测性能。
3.方法
本节将介绍所提出的改进检测模型(YOLO-FNC)。接下来,将详细介绍该模型的具体结构和方法。
A .架构
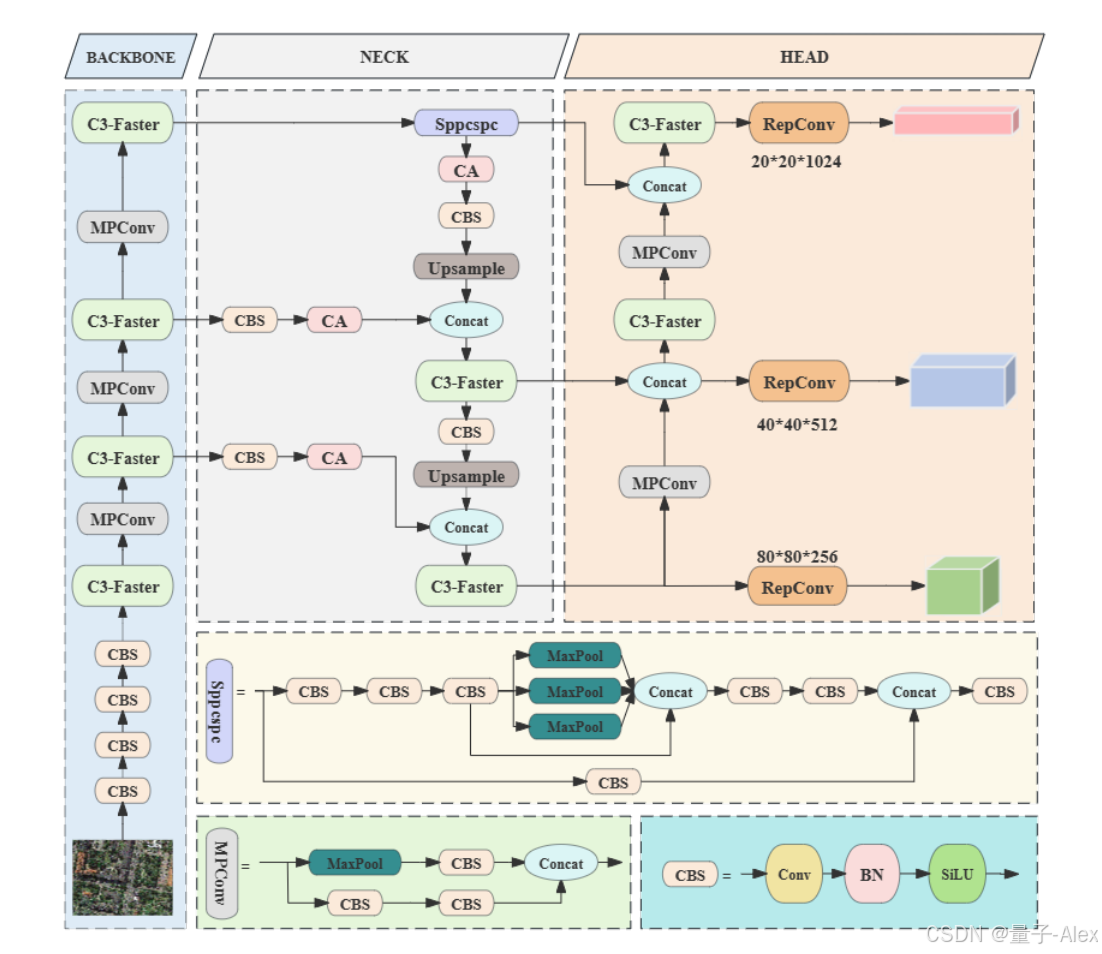
本节介绍了本文提出的YOLO-FNC目标检测算法。网络结构如图1所示。通常,高层信息能够很好地反映并聚合到单个点。小目标本身包含的像素较少。如果网络层数增加,聚合的特征将会减少。例如,一个15x15像素的小目标在卷积后可能只有1x1的特征。如果存在多个这样的小目标,检测精度将显著下降。本文认为YOLOv7中的E-ELAN模块卷积层过多,网络深度过高,会导致小目标信息的丢失。因此,我们提出的方法如下。首先,我们在YOLOv7模型中引入了C3-Faster模块,替换了基线模型YOLOv7中的E-ELAN模块。这一改进增强了特征提取能力,减少了模型参数,并提高了网络的检测和推理速度。其次,针对遥感数据集中小目标的特点,我们引入了NWD,并将其与GIoU损失函数结合,以增强小目标检测性能。最后,我们在不同特征提取层交互的位置以及SPPCSPC模块后的位置,向网络中添加了CA机制。这一改进使网络能够更好地学习有用的小目标信息。因此,模型能够强调重要的目标特征,减少无关信息的干扰,并增强算法检测小目标的能力。
B C3-Faster模块
C3-Faster的结构如图2所示。其整体架构由C3模块和FasterNet模块组成。C3模块主要用于增强网络的深度和感受野,以提升特征提取能力。C3模块由三个卷积(Conv)块和一个BottleNeck组成。第一个Conv块的步幅为2,可以将特征图的尺寸减半。第二个和第三个Conv块的步幅为1,这不会改变特征图的尺寸和空间分辨率,从而更好地保留目标的局部信息。C3模块中的Conv块均使用3x3卷积核。在每个Conv块之间,还添加了BN层和LeakyReLU激活函数,以提高模型的稳定性和泛化性能。然而,由于C3模块具有较深的特征提取层,因此不适用于检测小型遥感目标。FasterNet模块具有更高的运行速度和精度,由一个3x3的部分卷积(PConv)层和两个常规的1x1卷积层(Conv)组成。与常规卷积层Conv相比,PConv在优化内存访问的同时减少了冗余计算,使其成为一个简单高效的层。因此,PConv可以更高效地提取目标特征信息。它们共同表现为一个逆残差块,中间层增加了通道数,并通过快捷连接实现特征重用。因此,本文将C3模块和FasterNet模块结合,形成了C3-Faster模块。C3-Faster模块在检测遥感图像中的小型目标方面提供了增强的性能。
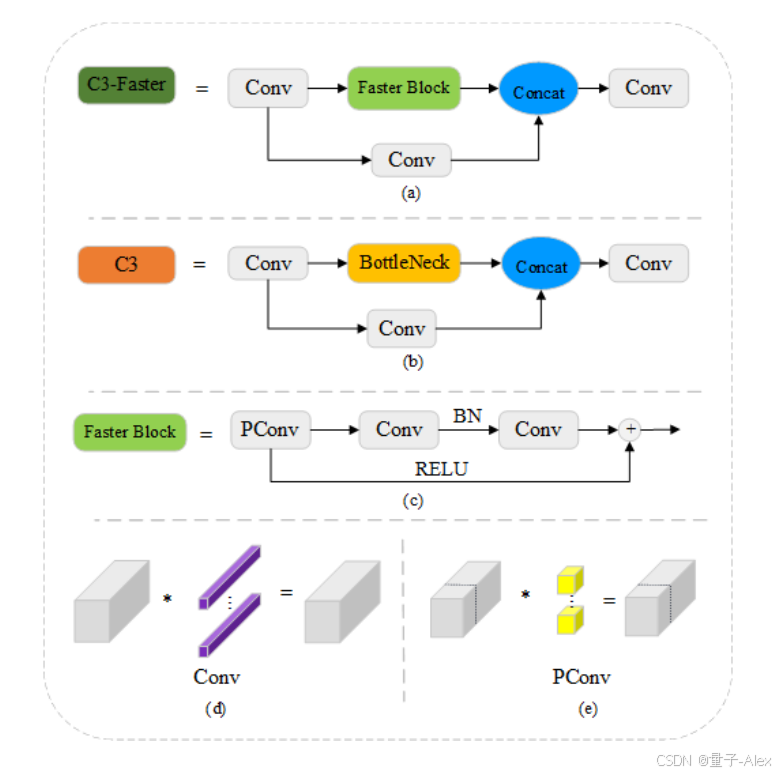
图2. C3-Faster模块示意图:(a) C3-Faster模块;(b) C3模块;© Faster Block;(d) Conv模块;(e) PConv。
C.NWD-GIoU模块
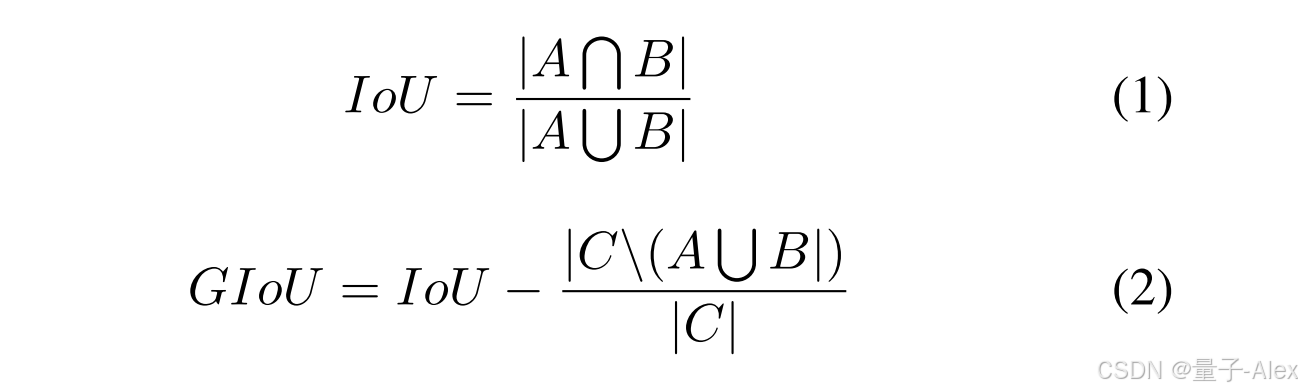
YOLOv7的损失函数是广义交并比(GIoU),它是在交并比(IoU)的基础上改进的。IoU的表达式为公式(1),GIoU的表达式为公式(2)。
传统的小目标检测模型主要针对相对规则尺寸的目标进行开发和研究。IoU指标对于不同尺度目标的敏感性差异较大。在YOLOv7基础模型中,检测小目标时,框之间的GIoU指标存在这样的问题:较小的位置偏移会导致小目标的IoU值急剧下降,而对于大目标,相同的位置偏移仅会使IoU值发生轻微变化。因此,GIoU对小目标的敏感性会导致标签容易相反,使得正负样本的特征相似,导致网络难以收敛。其次,使用GIoU作为指标时,每个Ground Truth(GT)分配的平均正样本数量少于1。这是因为某些GT与任何锚框之间的GIoU小于阈值。在训练过程中,小目标将缺乏监督信息,从而降低检测性能。因此,我们选择NWD作为训练和评估模型的损失函数,它不通过交并比(IoU)进行度量。NWD使用二维高斯分布对边界框进行建模,并通过相应的高斯分布预测目标框与标注目标框之间的相似性。这使得它对目标的尺度不敏感。通过将预测框和真实框建模为高斯分布,NWD提供了一种高效且准确的方法来度量它们之间的相似性。其度量方法可以有效地应用于小目标,即使它们不重叠,这克服了使用IoU作为小目标检测损失函数的局限性。此外,NWD的尺度不变性使其更适合度量小目标之间的相似性。因此,在遥感图像的小目标检测中使用它更为合适。因此,本文将NWD损失函数与GIoU结合,以提高网络的检测性能。NWD算法公式定义如下:该算法使用最优传输理论中的Wasserstein距离来计算两个分布之间的距离。对于两个二维高斯分布,
µ
1
=
N
(
m
1
,
Σ
1
)
µ_1= N(m_1, Σ_1)
µ1=N(m1,Σ1) 和
µ
2
=
N
(
m
2
,
Σ
2
)
µ_2= N(m_2, Σ_2)
µ2=N(m2,Σ2),其二阶Wasserstein距离可以定义为:

其中 ∥ ∥ F ∥∥_F ∥∥F表示Frobenius范数。此外,对于根据边界框 A = ( c x a , c y a , c w a , c h a ) A = (cx_a, cy_a, cw_a, ch_a) A=(cxa,cya,cwa,cha)和 B = ( c x b , c y b , c w b , c h b ) B = (cx_b, cy_b, cw_b, ch_b) B=(cxb,cyb,cwb,chb)建模的高斯分布 N a N_a Na和 N b N_b Nb,二阶Wasserstein距离可以进一步简化为:

然而, W 2 2 ( N a , N b ) W^2_2(N_a, N_b) W22(Na,Nb) 是一种距离度量,不能直接用作相似性度量。因此,我们通过其指数形式进行归一化,得到一种新的度量,称为归一化 Wasserstein 距离(NWD):

其中,C 是与数据集密切相关的常数。基于 NWD 的损失函数计算表达式如公式 (6) 所示:

定位损失采用GIoU。在大多数情况下,GIoU具有最小的回归误差。然而,考虑到本文使用的数据集并非完全由小目标组成,因此并未直接使用 L N W D L_{NWD} LNWD来替代 L G I o U L_{GIoU} LGIoU。通过为 L N W D L_{NWD} LNWD和 L G I o U L_{GIoU} LGIoU分配适当的融合权重r,提出了NWD-GIoU损失函数作为衡量标准。NWD-GIoU的计算表达式如公式(7)所示。

D. 坐标注意力模块
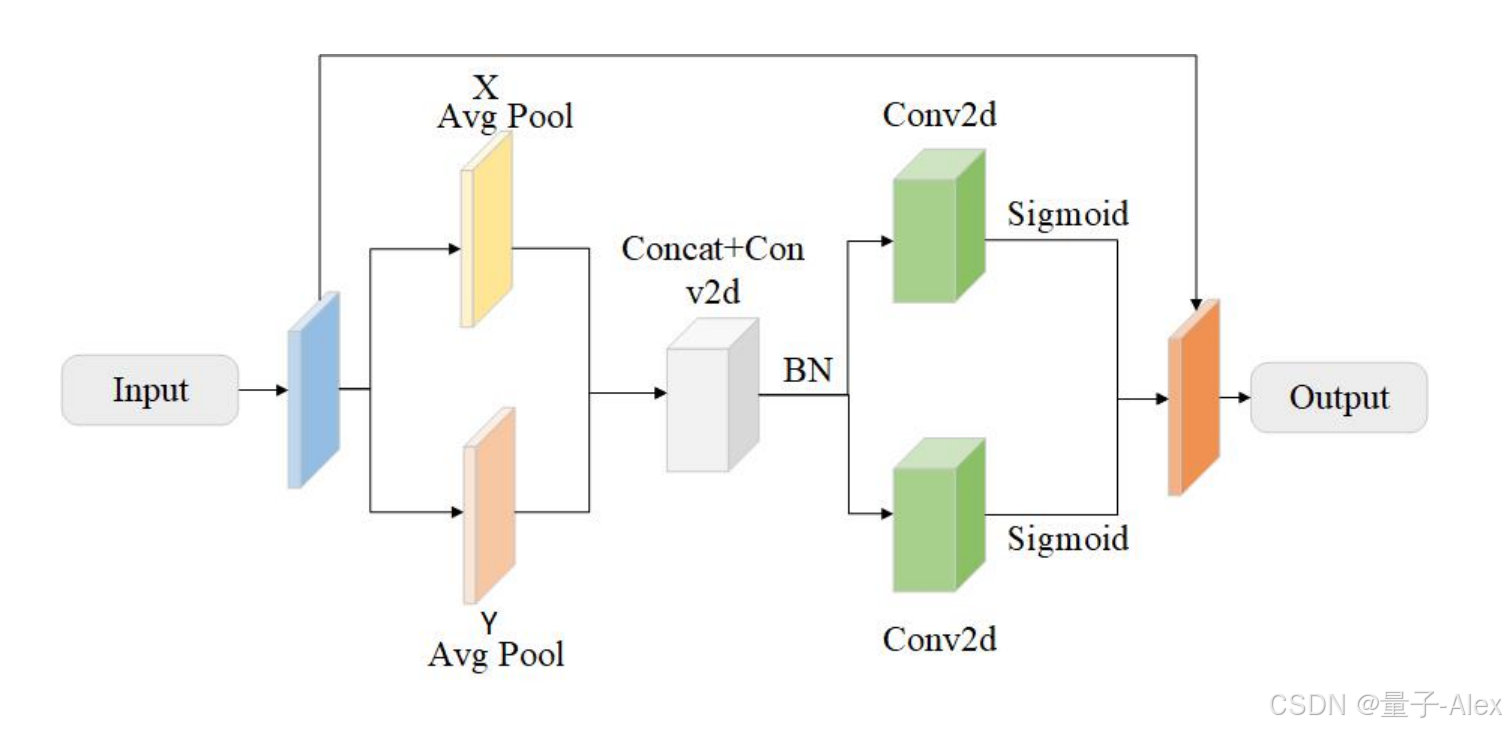
遥感图像的背景通常包含丰富的地形和环境信息,以及许多小型目标。从这些图像中提取有效特征并不容易。因此,在重要区域引入有效的注意力机制至关重要。注意力模块在深度学习中广泛应用,以更好地聚焦有用信息,从而增强特征提取能力。传统的注意力机制通过为每个通道计算权重来提升模型性能,但这会引入额外的参数。CA(Coordinate Attention)注意力机制简单且轻量,能够充分利用提取的位置信息,有效处理通道间关系,从而提高模型的准确性。CA注意力机制将位置信息嵌入到通道注意力中,结构紧凑,几乎不增加计算开销,可以灵活地集成到其他经典移动网络中。因此,我们将坐标注意力机制集成到改进的YOLOv7模型中,以增强目标检测性能。实验表明,将CA机制引入YOLOv7结构后,模型能够在检测过程中更有效地提取目标特征信息,而不会增加原始网络的参数量。图3展示了CA机制结构的可视化表示。
4.实验
为了验证我们提出的模型,我们在标准数据集上进行了对比和消融实验。接下来,我们将详细介绍数据集、评估指标、消融实验和对比实验。
4.1 数据集
我们在实验中选择了三个数据集:Dior[31]、AI-TOD[32]和VisDrone[33],用于遥感图像中的小目标检测。Dior数据集包含20个类别,共有23,463张图像和190,288个实例。Dior-Vehicle是Dior数据集中的一个单独类别。大多数数据集中的目标都是小目标,并且标记了像素数少于10的汽车目标。AI-TOD是一个非常典型的航空图像中的微小目标数据集,包含的微小目标像素数较少。AI-TOD提供了28,036张航空图像中的700,621个目标实例,分布在8个类别中。与现有的航空图像目标检测数据集相比,AI-TOD中目标的平均大小约为12.8像素,远小于其他数据集,并且容易与背景混淆,因此非常适合小目标检测任务。VisDrone数据集由AISKYEYE团队使用多种无人机在中国14个不同城市拍摄。它包含288个视频、261,908帧视频图像和10,209张静态图像。超过260万个感兴趣目标的边界框被手动标注,主要集中在行人和车辆上,并进一步分为10个类别。
B.实验设置
本工作的实验环境基于Windows 10系统。环境配置为CUDA v11.0,Pytorch版本为v1.7,Python版本为3.6。CPU为Intel® Xeon® Gold 5218R CPU @ 2.10 GHz,GPU为Quadro GV100,内存为32GB,输入图像尺寸为640 * 640像素,初始学习率为0.01,批量大小为16,动量为0.937,权重衰减为0.0005,总训练轮数为300。
C.评估指标
我们使用检测精度和检测速度作为评估指标。精确率(P)主要衡量模型的误检程度;召回率(R)主要衡量模型的漏检程度;平均精确率(AP)是P-R曲线下的面积;mAP是所有类别AP的平均值。计算方法如下:
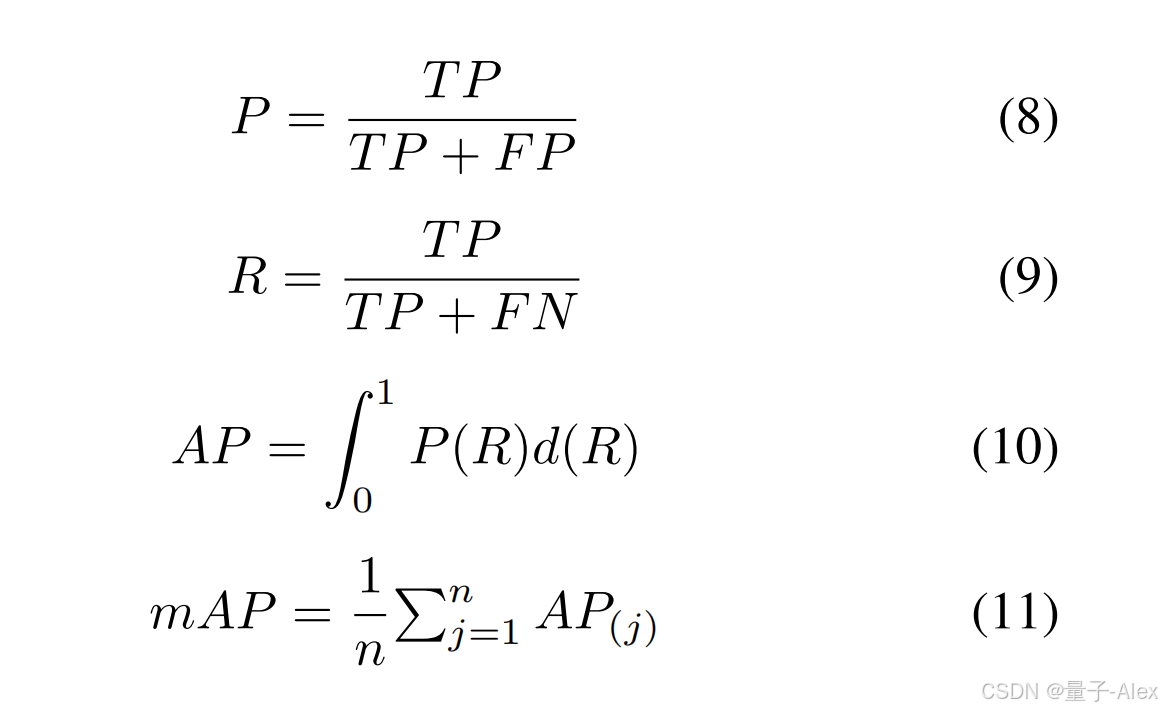
其中,TP为真正例,TN为真反例,FP为假正例,FN为假反例。n为类别数量;AP(j)表示每个类别的精度。模型复杂度使用Params表示。具体计算公式为:

其中, C o C_o Co 表示输出通道的数量, C i C_i Ci 表示输入通道的数量, K w K_w Kw 和 K h K_h Kh 分别表示卷积核的宽度和高度。
D.对比实验
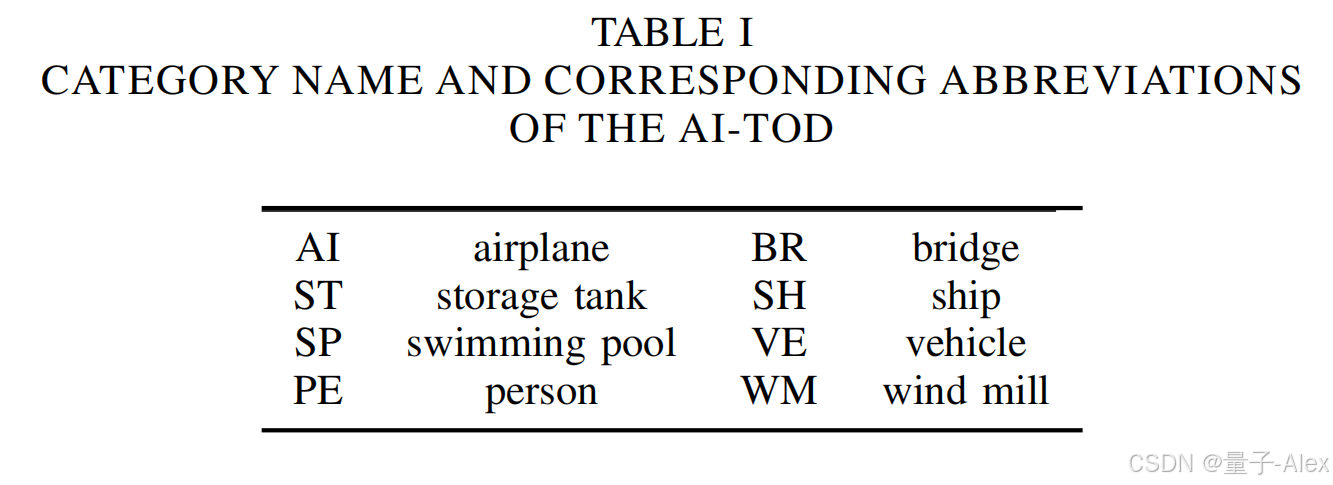
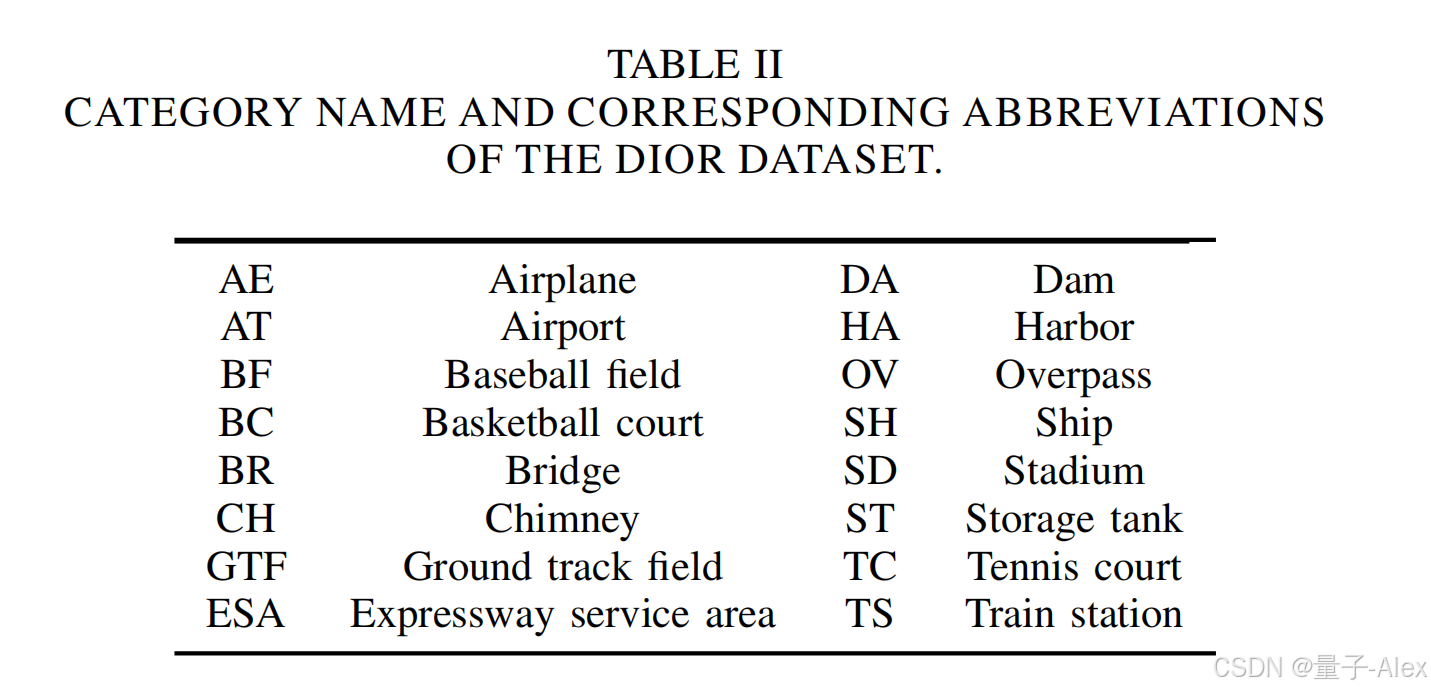
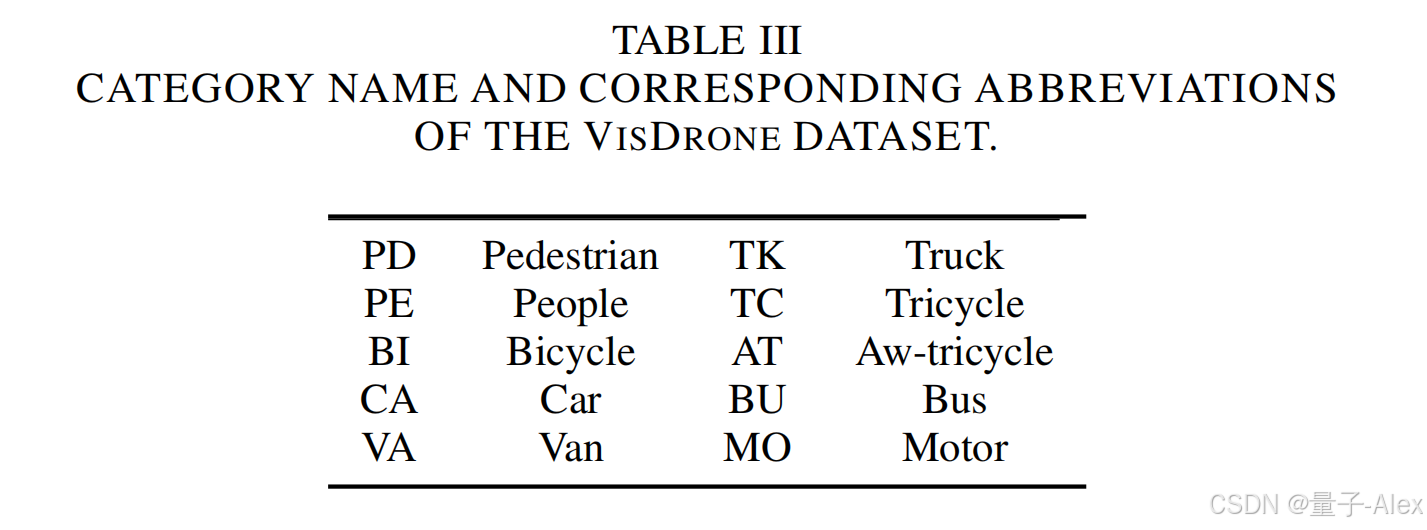
为了更清晰地展示结果,我们使用类别名称的缩写来代表AI-TOD、Dior和VisDrone数据集中的每个类别,分别如表I、表II和表III所示。
- AI-TOD数据集的结果:如表IV所示,我们的模型在AI-TOD数据集上进行了测试,并与包括基于锚点和无锚点检测器在内的其他方法进行了比较。除了之前提到的YOLO系列和Faster R-CNN外,还有SSD [34]、RetinaNet [29]、TridentNet [35]、FoveaBox [36]、RepPoints [37]和CornerNet [38]。参考实验结果,显然当IoU设置为0.5时,我们的YOLO-FNC达到了35.90%的AP性能;与基线模型YOLOv7相比,我们超出了14.20%的AP。当IoU大于0.5且小于0.95时,YOLO-FNC实现了15.48%的AP性能。与基线模型YOLOv7相比,我们超出了6.45%的AP。在这两种情况下,我们的模型也显著优于其他方法。
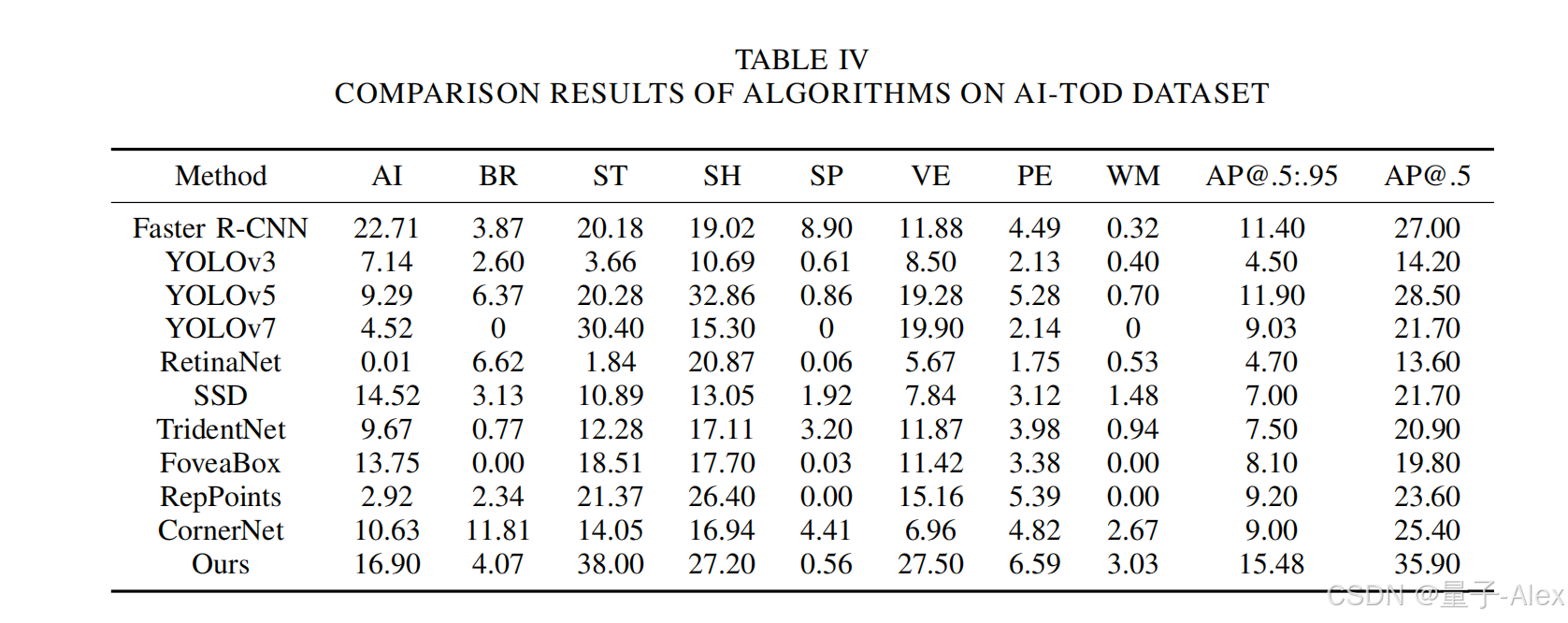
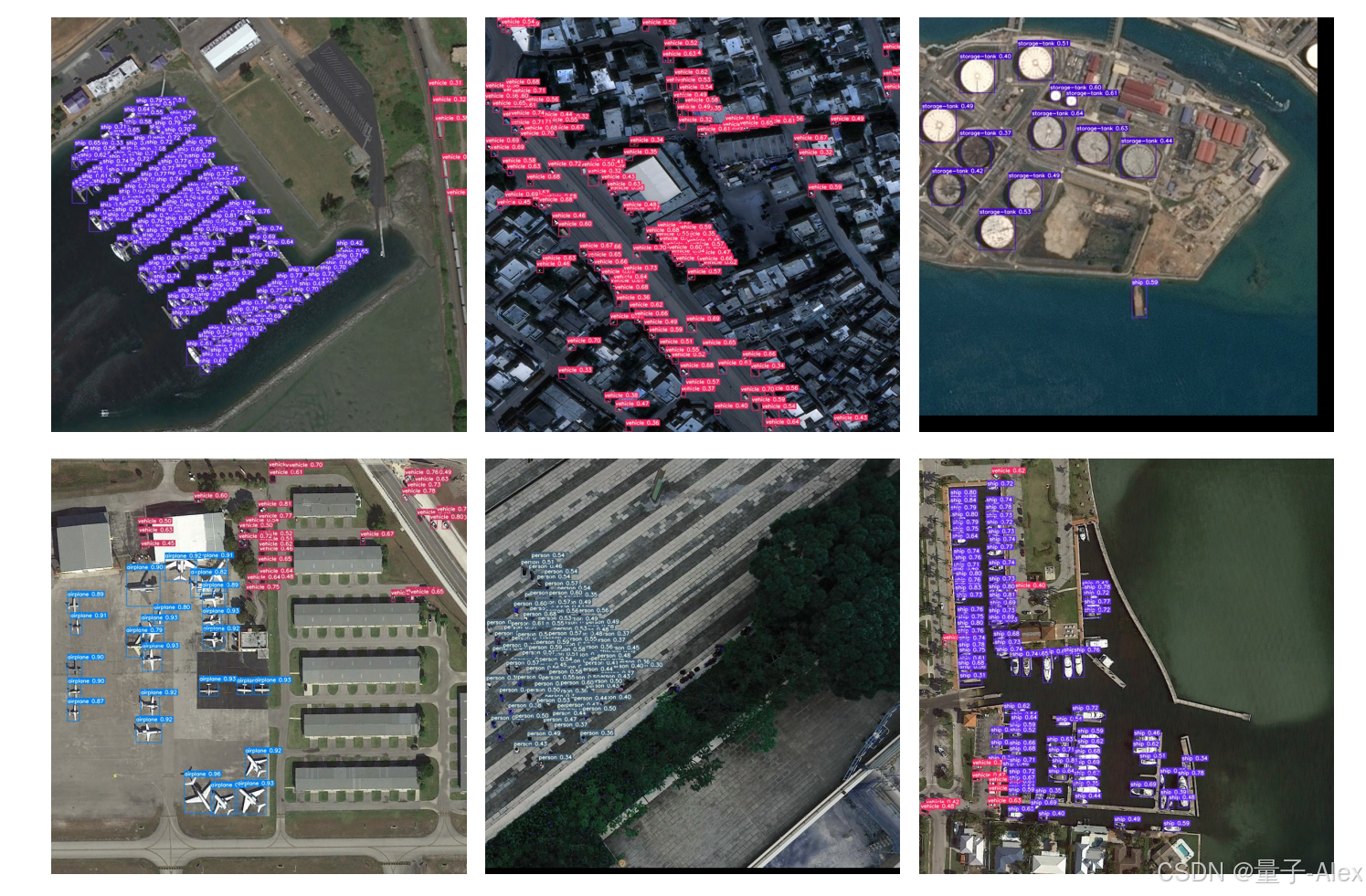
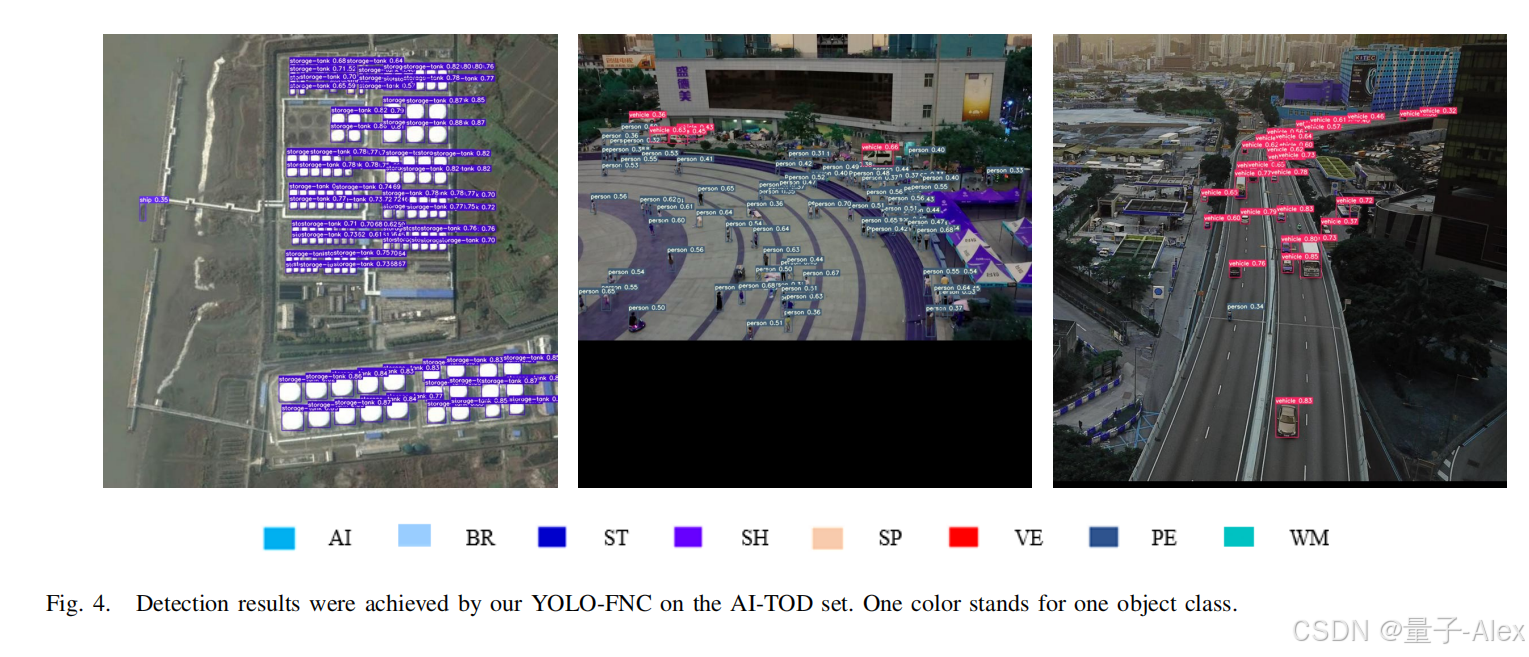
与无锚点检测器相比,我们的模型在5个类别中实现了最佳的检测性能,尤其是在一些困难任务(如车辆、船舶、行人)中表现突出,这充分证明了我们方法的有效性。视觉检测结果如图4所示。可以观察到,YOLO-FNC不仅能为小目标生成精确的边界框,还能在各种具有挑战性的场景中稳健工作,例如密集排列的场景、背景对比度低的场景等。我们的方法均能成功检测并定位目标,且具有令人满意的准确度。
2) DIOR数据集的结果:从表V中可以看出,在所有模型对DIOR数据集的测试结果中,汽车、船只、储罐等多个小目标类别的准确率均取得了相对较好的结果。加粗标记的结果是所有对比模型中最好的结果。对于较大类别的目标,如棒球场、篮球场等,该模型的检测精度相比其他算法也有所提升。这证明了本文提出的算法具有较强的适用性。与YOLOv7基线模型相比,我们测试中的大多数类别都更加准确。这进一步证明了我们的算法是一种相对优秀的目标检测算法。
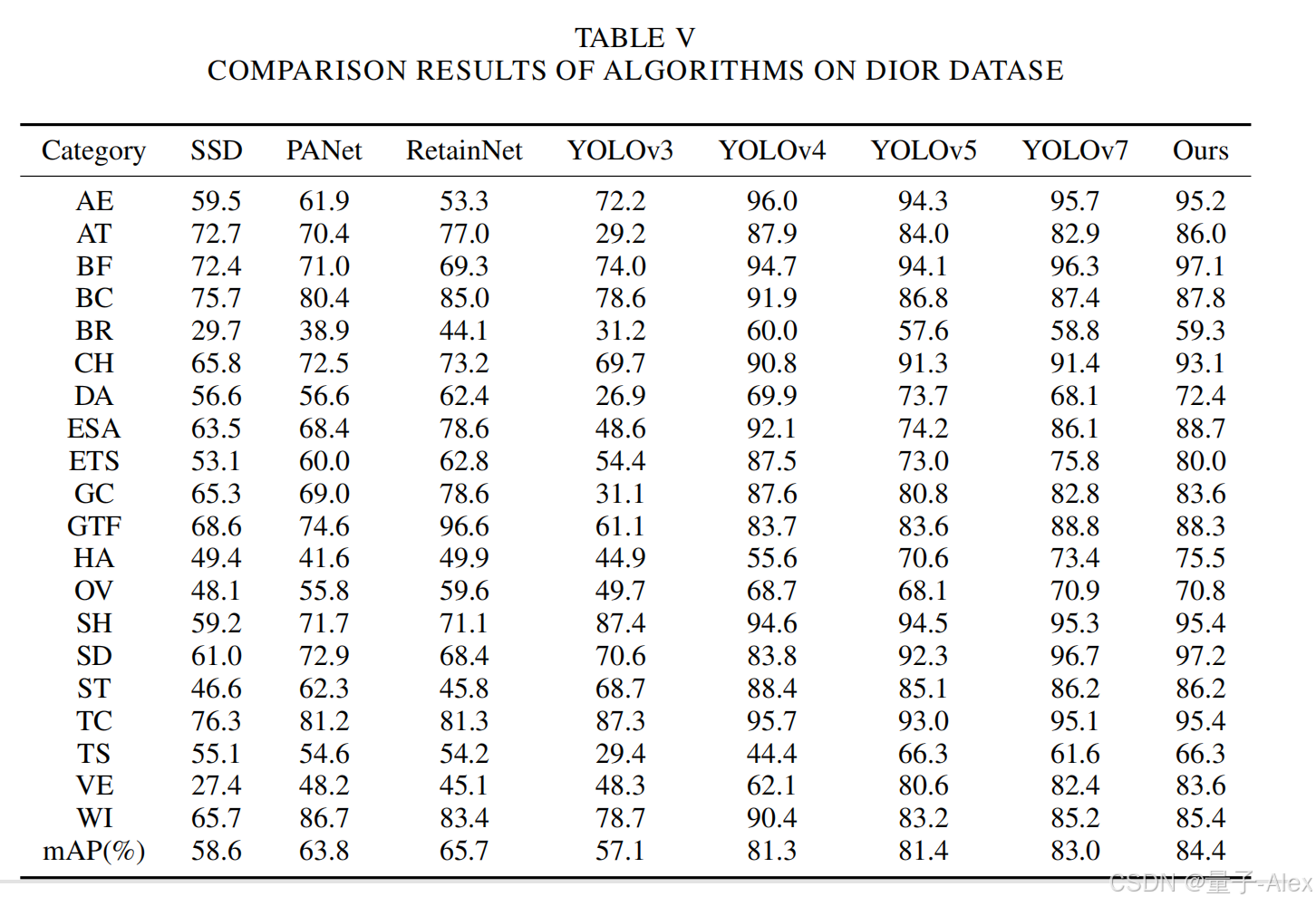
为了更好地展示YOLO-FNC在遥感图像中小目标检测中的优异性能,本文从Dior数据集中选取了包含小目标的三类场景进行检测和对比。这三类场景分别是密集分布下的船舶检测、部分阴影遮挡下的车辆检测以及复杂背景下的地面跑道检测。我们使用YOLOv7作为基线对比模型。图5展示了YOLOv7与YOLO-FNC算法在Dior数据集上的检测对比。YOLOv7和YOLO-FNC的检测结果分别显示在上行和下行中。黄色粗线框表示误检目标,红色粗线框表示漏检目标。
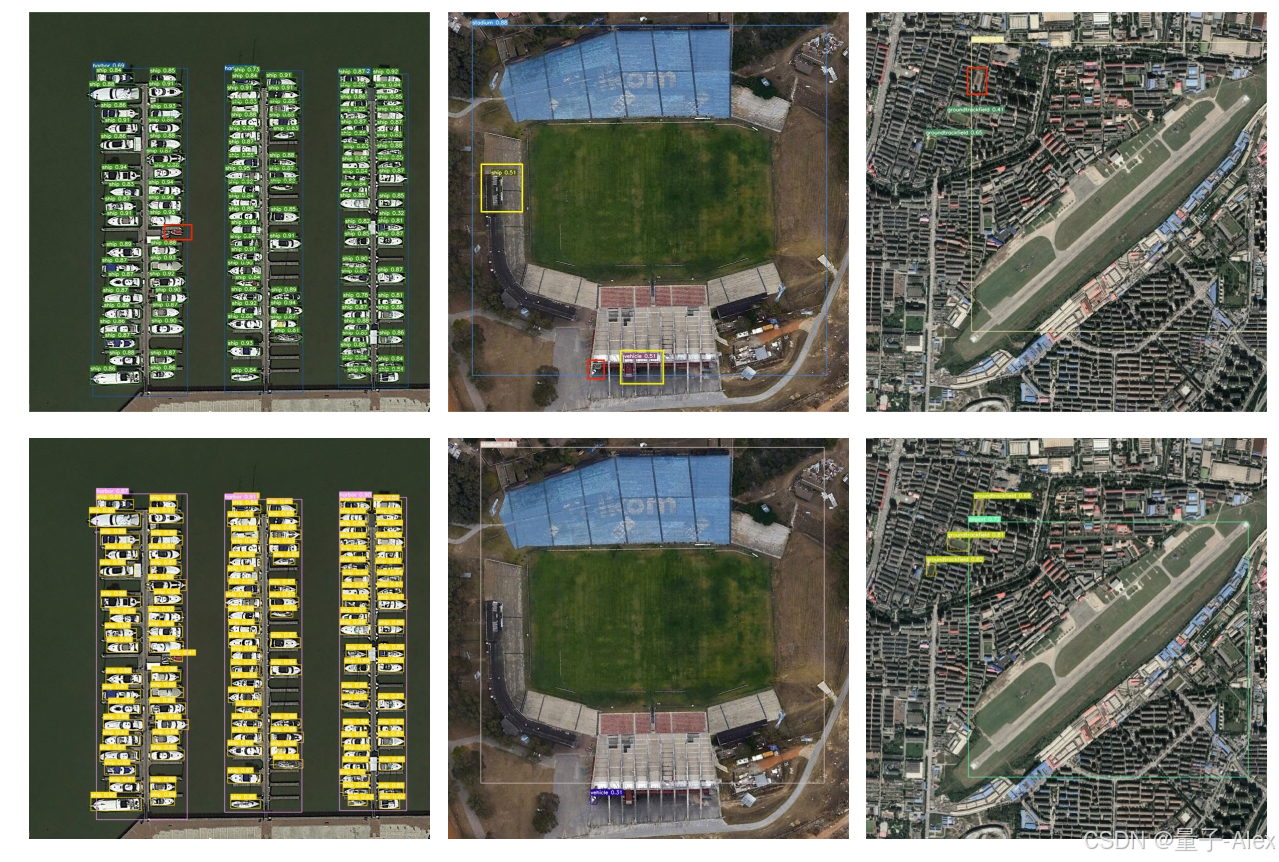
图5. DIOR数据集上小目标检测结果的对比。左图:密集分布环境下的船舶检测。中图:部分阴影遮挡下的车辆检测。右图:复杂背景下的地面跑道检测。
本文旨在更好地展示YOLO-FNC在遥感图像中小目标检测中的优异性能。本文从Dior数据集中选取了包含小目标的三类场景进行检测和对比。这三类场景分别是密集分布下的船舶检测、部分阴影遮挡下的车辆检测以及复杂背景下的地面跑道检测。我们使用YOLOv7作为基线对比模型。图5展示了YOLOv7与YOLO-FNC算法在Dior数据集上的检测对比结果。YOLOv7和YOLO-FNC的检测结果分别显示在上行和下行中。黄色粗线框表示误检目标,红色粗线框表示漏检目标。
如图5所示,基线第一行中的红色框表示漏检,黄色框表示误检。YOLO-FNC比YOLOv7检测到更多的小目标,且漏检和误检显著减少。如图5(左)所示,在密集分布的船舶检测场景中,YOLOv7漏检了像素较小且分布密集的目标,而YOLO-FNC检测到了更多的船舶。图5(中)展示了被阴影遮挡的小目标检测情况。即使目标被遮挡,YOLO-FNC仍能检测到较小的车辆。相反,YOLOv7未能检测到阴影中的车辆,并误检了目标。图5(右)显示,在复杂背景下的目标检测中,YOLO-FNC仍能检测到图像中像素较小的田径场,而YOLOv7则漏检了像素较小的田径场。综上所述,在遥感图像小目标检测任务中,YOLOv7表现出较差的检测性能,漏检率和误检率较高。本文提出的YOLO-FNC模型在密集分布和复杂场景中的检测性能得到了提升。
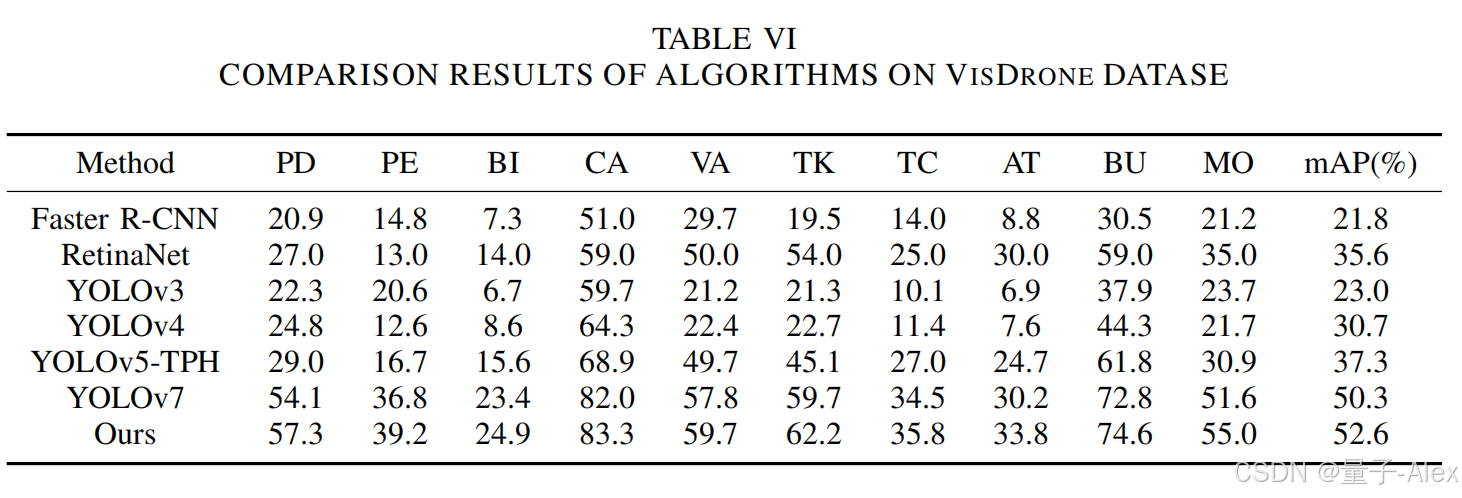
- VisDrone数据集的结果:实验结果如表VI所示。我们的模型在多个类别中取得了良好的效果。YOLO-FNC算法的mAP值为52.6%,在对比算法中表现最佳。这有效证明了YOLO-FNC的通用性。
E.消融实验
为了展示我们提出的工作中每个部分的有效性,我们在三个数据集上进行了消融实验。其中,DIOR数据集包含了多种多样的物体,包括少量中型和大型物体。为了评估在小物体上的性能,我们选择了DIOR数据集中的车辆类别进行消融实验。该类别在数据集中占据了所有小物体的较高比例。DIOR车辆类别包含6,421张图像和超过32,000个物体。为了进一步验证改进模块的有效性,在相同的实验条件下,我们在一个更大的AI-TOD数据集上进行了实验,该数据集以突出的小物体为特点。
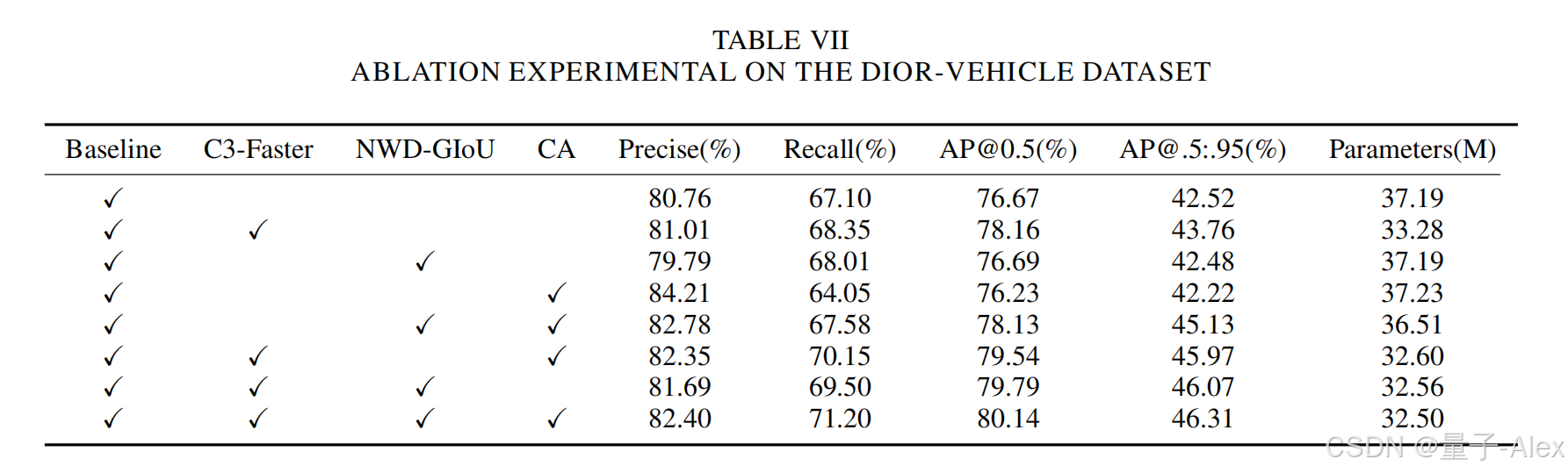
在DIOR-Vehicle数据集上的消融实验结果如表VII所示。我们以YOLOv7为基线并在此基础上进行扩展。仅通过在YOLOv7算法中添加C3-Faster模块,AP值显著提升,模型参数量从37.19M减少到33.28M。随后,仅在YOLOv7中引入NWD模块,精度和召回率略有提升,其他指标也有小幅改善。我们还在YOLOv7的适当位置嵌入了CA注意力机制,与基线模型相比,准确率显著提高了3.4%。当将这三个模块两两组合添加到模型中时,可以看到多项指标均有所提升。最后,同时将三个模块引入YOLOv7。与YOLOv7基线模型相比,精度提高了1.64%,召回率提高了4.1%,mAP@0.5提高了3.47%,mAP@.5:.95提高了3.79%,参数量减少了4.69M。
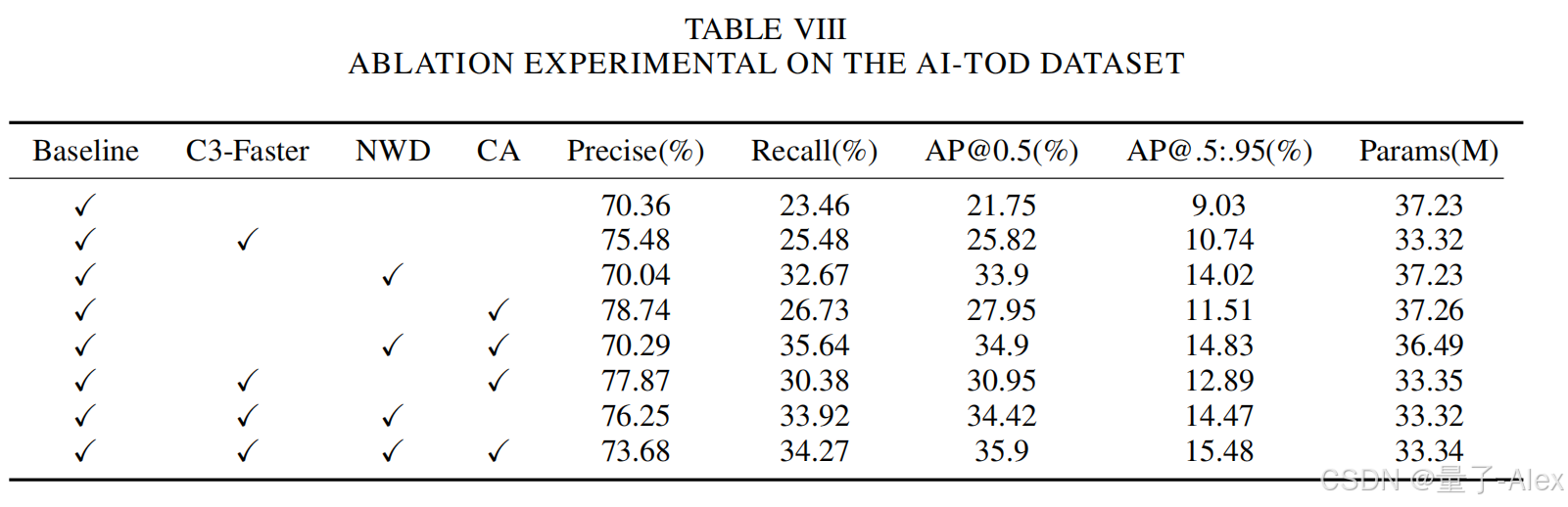
在AI-TOD数据集上的消融实验结果如表VIII所示。实验条件与上述相同。引入C3-Faster模块后,精度、召回率和mAP均有所提升,同时减少了参数量。随着NWD的引入,mAP提升最为显著,mAP@0.5从21.75提升至33.9,mAP@.5:.95从9.03提升至14.02。嵌入CA注意力机制后,各项指标也有显著改善。当每个模块成对嵌入基线模型时,实验结果均有显著提升。最后,将三个模块同时嵌入YOLOv7中。与YOLOv7基线模型相比,精度提升了3.32%,召回率提升了10.81%,mAP@0.5提升了14.15%,mAP@.5:.95提升了6.45%,参数量减少了3.89 M。
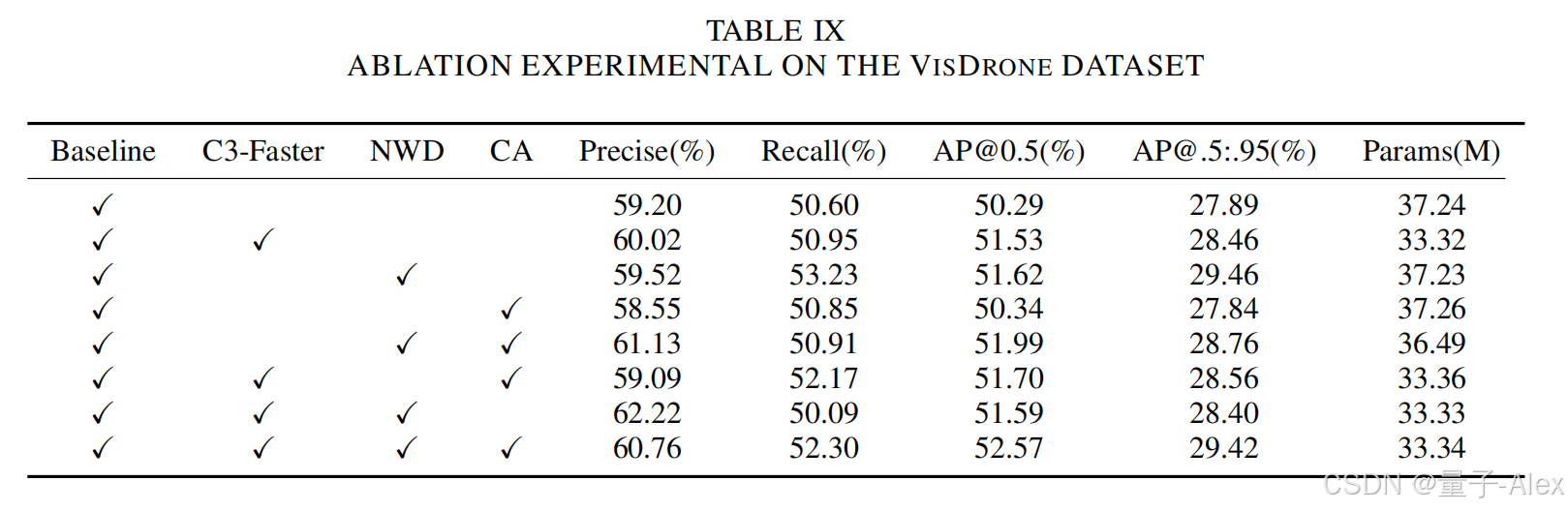
VisDrone数据集上的消融实验结果如表IX所示。在该数据集上的消融实验步骤与上述相同。通过将三个模块单独或成对嵌入模型中,多个检测指标得到了有效提升。当三个模块同时嵌入模型时,精确率和召回率均有所提高,mAP@0.5和mAP@.5:95分别达到52.57%和29.42%,同时参数量也有所减少。
综上所述,上述实验结果展示了我们工作中每一部分的有效性。我们的模型在三个数据集中均表现出良好的检测性能。
5.结论
为了解决遥感图像中小目标检测精度低和漏检严重的问题,本文提出了一种基于YOLOv7的改进目标检测网络。首先,在YOLOv7网络中引入C3-Faster模块,能够简单有效地提取空间特征,增强目标特征的提取能力。其次,我们在网络中引入了NWD结合GIoU作为位置回归损失函数,以提高遥感图像中小目标的检测效果。最后,我们将CA嵌入到YOLOv7模型中,不仅能够同时关注通道信息和位置信息,减少冗余特征信息,而且具有足够的灵活性和轻量化,有效提升了网络的检测性能。
在本文中,我们对DIOR-Vehicle、AI-TOD和VisDrone数据集进行了消融实验,并与YOLOv7进行了对比。通过一系列消融实验,我们证明了所提出工作的每一部分都是正确且可行的。在对比实验中,我们在Dior数据集、AI-TOD数据集以及VisDrone数据集上进行了小目标检测。实验结果表明,YOLO-FNC具有明显优势。YOLO-FNC在Dior数据集上的mAP达到了84.4%,在AI-TOD数据集上的mAP达到了35.9%,在VisDrone数据集上的mAP达到了52.6%。这些结果优于其他对比算法,有效证明了本文所提出算法的可行性和优越性。在未来的工作中,我们将进一步探索更轻量级且有效的网络模型,以提升遥感图像中小目标检测的性能。


















 3404
3404

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











