










1
在structure官网下载OpenNI的SDK,注意版本对应无误
2
解压后在该目录运行
sudo ./install.sh
3
还是在这个界面下,输入以下两行设置环境
cat OpenNIDevEnvironment >> ~/.bashrc
source ~/.bashrc
这样将openni的环境变量添加到了bashrc中。
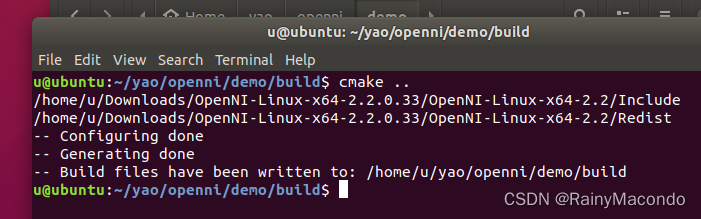
我的电脑中,环境如下(INCLUDE和REDIST):
export OPENNI2_INCLUDE=/home/u/Downloads/OpenNI-Linux-x64-2.2.0.33/OpenNI-Linux-x64-2.2/Include
export OPENNI2_REDIST=/home/u/Downloads/OpenNI-Linux-x64-2.2.0.33/OpenNI-Linux-x64-2.2/Redist
4 写一个简单的CMakeLists测试一下
#include <opencv2/opencv.hpp>
#include <OpenNI.h>
#include "opencv2/imgproc/types_c.h"
using namespace openni;
using namespace cv;
class Grabber
{
public:
void InitOpenNI();
void InitDevice();
void InitDepthStream();
void InitColorStream();
void Run();
private:
void CapturePsenseDepthFrame();
void CapturePsenseColorFrame();
cv::Mat ChangeDepthForDisplay(const cv::Mat& mat);
openni::Device* device_;
openni::VideoStream* depth_stream_;
openni::VideoStream* color_stream_;
openni::VideoFrameRef* depth_frame_;
openni::VideoFrameRef* color_frame_;
};
void Grabber::InitOpenNI()
{
auto rc = openni::OpenNI::initialize();
if (rc != openni::STATUS_OK)
{
printf("Initialize failed\n%s\n", openni::OpenNI::getExtendedError());
exit(0);
}
}
void Grabber::InitDevice()
{
device_ = new openni::Device();
auto rc = device_->open(openni::ANY_DEVICE);
if (rc != openni::STATUS_OK)
{
printf("Couldn't open device\n%s\n", openni::OpenNI::getExtendedError());
exit(0);
}
}
void Grabber::InitDepthStream()
{
depth_stream_ = new openni::VideoStream();
// Create depth stream from device
if (device_->getSensorInfo(openni::SENSOR_DEPTH) != nullptr)
{
auto rc = depth_stream_->create(*device_, openni::SENSOR_DEPTH);
if (rc != openni::STATUS_OK)
{
printf("Couldn't create depth stream\n%s\n", openni::OpenNI::getExtendedError());
exit(0);
}
}
// Get info about depth sensor
const openni::SensorInfo& sensor_info = *device_->getSensorInfo(openni::SENSOR_DEPTH);
const openni::Array<openni::VideoMode>& arr = sensor_info.getSupportedVideoModes();
// Look for VGA mode in depth sensor and set it for depth stream
for (int i = 0; i < arr.getSize(); ++i)
{
const openni::VideoMode& vmode = arr[i];
if (vmode.getPixelFormat() == openni::PIXEL_FORMAT_DEPTH_1_MM &&
vmode.getResolutionX() == 640 &&
vmode.getResolutionY() == 480)
{
depth_stream_->setVideoMode(vmode);
break;
}
}
// Start the depth stream
auto rc = depth_stream_->start();
if (rc != openni::STATUS_OK)
{
printf("Couldn't start the depth stream\n%s\n", openni::OpenNI::getExtendedError());
exit(0);
}
depth_frame_ = new openni::VideoFrameRef();
}
void Grabber::InitColorStream()
{
color_stream_ = new openni::VideoStream();
if (device_->getSensorInfo(openni::SENSOR_COLOR) != nullptr)
{
auto rc = color_stream_->create(*device_, openni::SENSOR_COLOR);
if (rc != openni::STATUS_OK)
{
printf("Couldn't create color stream\n%s\n", openni::OpenNI::getExtendedError());
exit(0);
}
}
// Get info about color sensor
const openni::SensorInfo& sensor_info = *device_->getSensorInfo(openni::SENSOR_COLOR);
const openni::Array<openni::VideoMode>& arr = sensor_info.getSupportedVideoModes();
// Look for VGA mode and set it for color stream
for (int i = 0; i < arr.getSize(); ++i)
{
const openni::VideoMode& vmode = arr[i];
if (
vmode.getResolutionX() == 640 &&
vmode.getResolutionY() == 480)
{
color_stream_->setVideoMode(vmode);
break;
}
}
// Note: Doing image registration earlier than this seems to fail
if (device_->isImageRegistrationModeSupported(openni::IMAGE_REGISTRATION_DEPTH_TO_COLOR))
{
auto rc = device_->setImageRegistrationMode(openni::IMAGE_REGISTRATION_DEPTH_TO_COLOR);
if (rc == openni::STATUS_OK)
std::cout << "Depth to color image registration set success\n";
else
std::cout << "Depth to color image registration set failed\n";
}
else
{
std::cout << "Depth to color image registration is not supported!!!\n";
}
// Start color stream
auto rc = color_stream_->start();
if (rc != openni::STATUS_OK)
{
printf("Couldn't start the depth stream\n%s\n", openni::OpenNI::getExtendedError());
exit(0);
}
color_frame_ = new openni::VideoFrameRef();
}
void Grabber::CapturePsenseDepthFrame()
{
auto rc = depth_stream_->readFrame(depth_frame_);
if (rc != openni::STATUS_OK)
{
printf("Read failed!\n%s\n", openni::OpenNI::getExtendedError());
}
if (depth_frame_->getVideoMode().getPixelFormat() != openni::PIXEL_FORMAT_DEPTH_1_MM && depth_frame_->getVideoMode().getPixelFormat() != openni::PIXEL_FORMAT_DEPTH_100_UM)
{
printf("Unexpected frame format\n");
}
// Get pointer to Primesense depth frame
openni::DepthPixel* dev_buf_ptr = (openni::DepthPixel*)depth_frame_->getData();
// Copy frame data to OpenCV mat
cv::Mat depth_mat(depth_frame_->getHeight(), depth_frame_->getWidth(), CV_16U, dev_buf_ptr);
cv::Mat disp_mat = ChangeDepthForDisplay(depth_mat);
cv::imshow("Depth", disp_mat);
}
void Grabber::CapturePsenseColorFrame()
{
// Read from stream to frame
auto rc = color_stream_->readFrame(color_frame_);
if (rc != openni::STATUS_OK)
{
printf("Read failed!\n%s\n", openni::OpenNI::getExtendedError());
}
// Pointer to Primesense color frame
openni::RGB888Pixel* dev_buf_ptr = (openni::RGB888Pixel*)color_frame_->getData();
// Make mat from camera data
cv::Mat color_mat(color_frame_->getHeight(), color_frame_->getWidth(), CV_8UC3, dev_buf_ptr);
// Convert to BGR format for OpenCV
cv::cvtColor(color_mat, color_mat, CV_RGB2BGR);
cv::imshow("Color", color_mat);
}
void Grabber::Run()
{
openni::VideoStream* streams[] = { depth_stream_, color_stream_ };
while (true)
{
int readyStream = -1;
auto rc = openni::OpenNI::waitForAnyStream(streams, 2, &readyStream, 2000);
if (rc != openni::STATUS_OK)
{
printf("Wait failed! (timeout is %d ms)\n%s\n", 2000, openni::OpenNI::getExtendedError());
break;
}
switch (readyStream)
{
case 0:
CapturePsenseDepthFrame();
break;
case 1:
CapturePsenseColorFrame();
break;
default:
printf("Unxpected stream\n");
}
char c = cv::waitKey(10);
if ('q' == c)
break;
}
}
cv::Mat Grabber::ChangeDepthForDisplay(const cv::Mat& mat)
{
assert(CV_16U == mat.type());
const float depth_near = 500;
const float depth_far = 5000;
const float alpha = 255.0 / (depth_far - depth_near);
const float beta = -depth_near * alpha;
cv::Mat fmat;
mat.convertTo(fmat, CV_32F);
for (int r = 0; r < mat.rows; ++r)
{
for (int c = 0; c < mat.cols; ++c)
{
float v = fmat.at<float>(r, c) * alpha + beta;
if (v > 255) v = 255;
if (v < 0) v = 0;
fmat.at<float>(r, c) = v;
}
}
cv::Mat bmat;
fmat.convertTo(bmat, CV_8U);
cv::Mat cmat;
cv::cvtColor(bmat, cmat, CV_GRAY2BGR);
cv::applyColorMap(cmat, cmat, cv::COLORMAP_OCEAN);
return cmat;
}
int main()
{
Grabber grabber;
grabber.InitOpenNI();
grabber.InitDevice();
grabber.InitDepthStream();
grabber.InitColorStream();
grabber.Run();
return 0;
}
cmake_minimum_required(VERSION 2.8)
project(testopenni)
include_directories($ENV{OPENNI2_INCLUDE})
link_directories($ENV{OPENNI2_REDIST})
message($ENV{OPENNI2_INCLUDE})
message($ENV{OPENNI2_REDIST})
find_package(OpenCV REQUIRED)
add_executable(${PROJECT_NAME} opennitest.cpp)
target_link_libraries(${PROJECT_NAME} ${OpenCV_LIBS} libOpenNI2.so )
cmake有如下信息则环境配置无误:
截止2022.7.29
目前问题:
虚拟机连接摄像头为找到,未解决、
















 3731
3731











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









