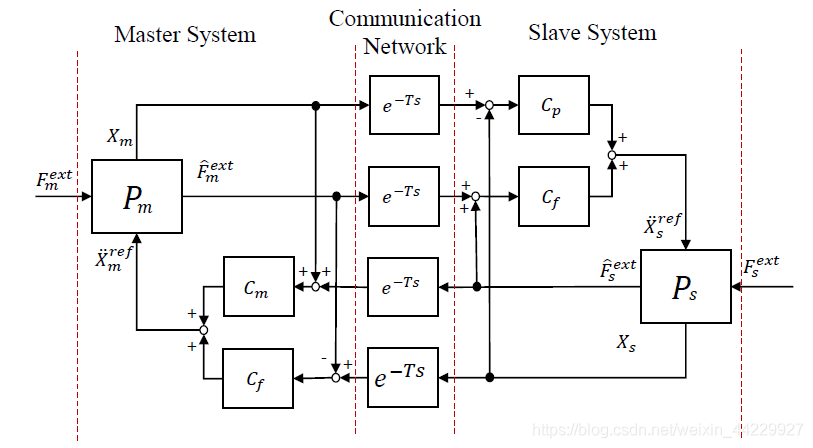
双向控制算法 双向控制系统仿真结果 双向控制系统 控制框图 控制律 仿真结果 仿真模拟:自由运动,抓取海绵,抓取铁块的操作。 可以看出当在与铁块这种较硬的东西发生接触式,系统会出现不稳定。 实验视频: 视频表现可参考->没录像借用其他人的视频










 博客围绕双向控制系统展开,介绍了控制框图和控制律,并给出仿真结果。仿真模拟包括自由运动、抓取海绵和铁块等操作,发现系统与铁块接触时会出现不稳定情况,还提及实验视频借用他人的。
博客围绕双向控制系统展开,介绍了控制框图和控制律,并给出仿真结果。仿真模拟包括自由运动、抓取海绵和铁块等操作,发现系统与铁块接触时会出现不稳定情况,还提及实验视频借用他人的。



 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























