









串联和并联机器人对比
串联机器人和并联机器人各有优缺点。
串联机器人
- 优点
- 工作空间大;
- 可实现的姿态多;
- 缺点
- 能量效率低,加速性差;
- 末端负载小;
- 由于误差累积和材料形变,精度差;
并联机器人
- 优点
- 由于可动平台轻,可以实现高速度、高加速度和高的能量效率;
- 连杆不受弯曲力矩,刚度高,精度高;
- 输出能力强;
- 缺点
- 工作空间小;
- 不易校准;
delta机器人
delta并联机器人有三个自由度,常常在教学过程中作为操作杆使用,本篇博文对delta并联机器人的运动学进行分析。
这里建模的对象是:the ABB FlexPicker IRB 360-1/1600。

逆运动学
delta机器人的逆运动学比较简单,就是根据末端位置反算出关节位置,但是在实际使用过程中,当delta机器人作为操作杆使用时,逆运动学将没有那么重要,或者说逆运动学可以作为正运动学计算精度验证的工具。
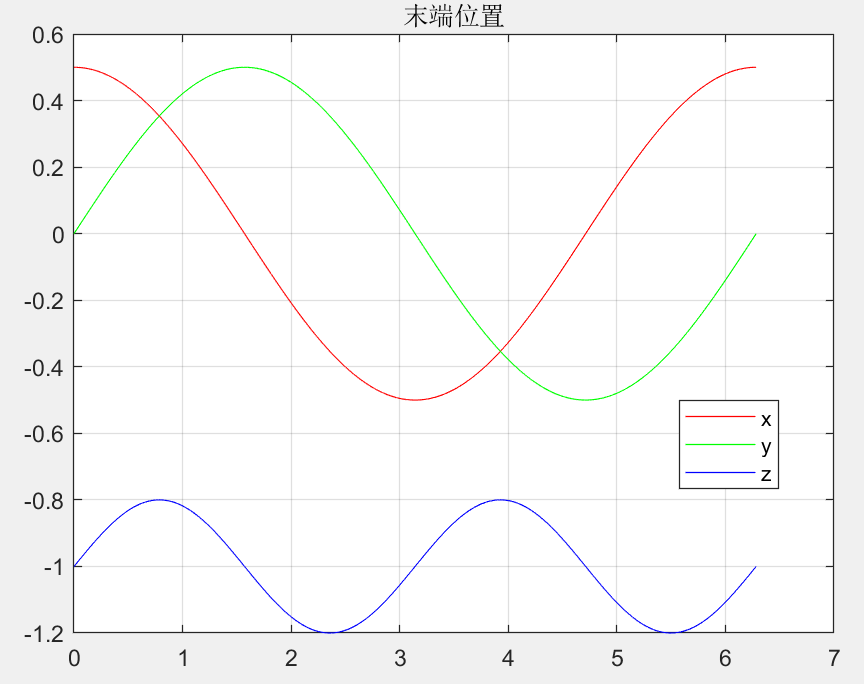
如下图所示是delta机器人根据末端轨迹运动的仿真效果。

关节位置如下如:

末端位置轨迹如下:
正运动学
delta机器人的正运动学相对逆运动学比较复杂,如果方式选择不当会出现奇异的问题难以解决,这里推荐使用几何法直接根据关节角度解算出末端的位置。
下图是根据第一章逆运动学求出的关节位置作为输入量,计算出末端运动的轨迹。可以看出轨迹相同。

更精确的可以比较正逆运动学之间的误差,可见误差在10e-13。

微分运动学
微分运动学就是根据关节速度求出笛卡尔速度。
这里仍然使用逆运动学的结果进行验证。
首先差分出逆运动学生成轨迹所使用的关节速度,如下图所示:

经过雅可比矩阵求出对应时刻的末端速度,如下图,*线(ref)是参考值。

可以看出雅可比矩阵正确,微分运动学正确。
工作空间
基于正运动学的考虑关节限位的工作空间如下图。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









