







 本文详细介绍了如何在英威腾DA200驱动器中设置111报文,并通过博途程序进行参数调整。主要步骤包括:从官网下载DA200资料,修改调试软件参数如速度模式下的加减速时间,以及在博途程序中调整DB默认值、启动和停止操作,特别是当前位置回零的模式5设定。同时提供了博途Drive全局库的下载链接。
本文详细介绍了如何在英威腾DA200驱动器中设置111报文,并通过博途程序进行参数调整。主要步骤包括:从官网下载DA200资料,修改调试软件参数如速度模式下的加减速时间,以及在博途程序中调整DB默认值、启动和停止操作,特别是当前位置回零的模式5设定。同时提供了博途Drive全局库的下载链接。
目录
1、DA200官网资料下载

2.67是配置好的文件
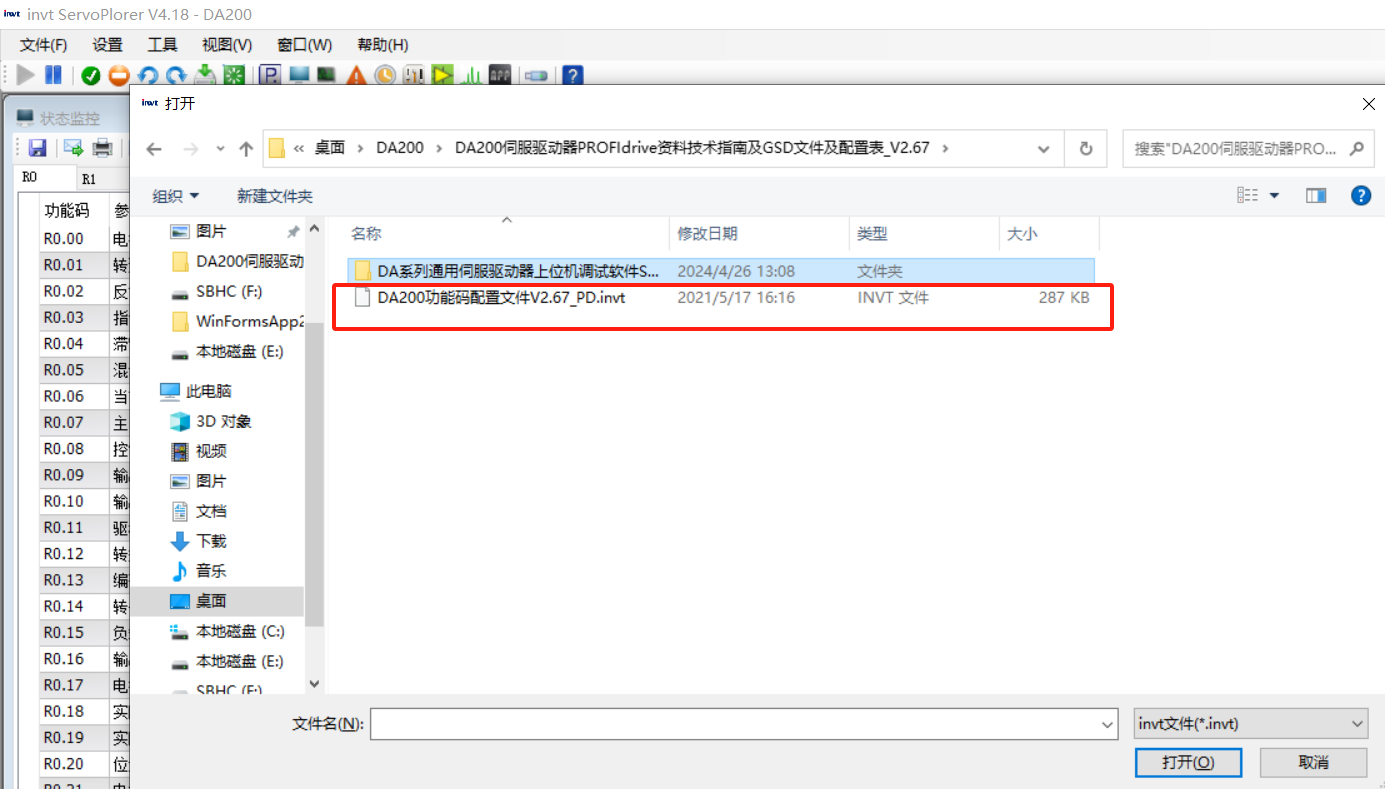
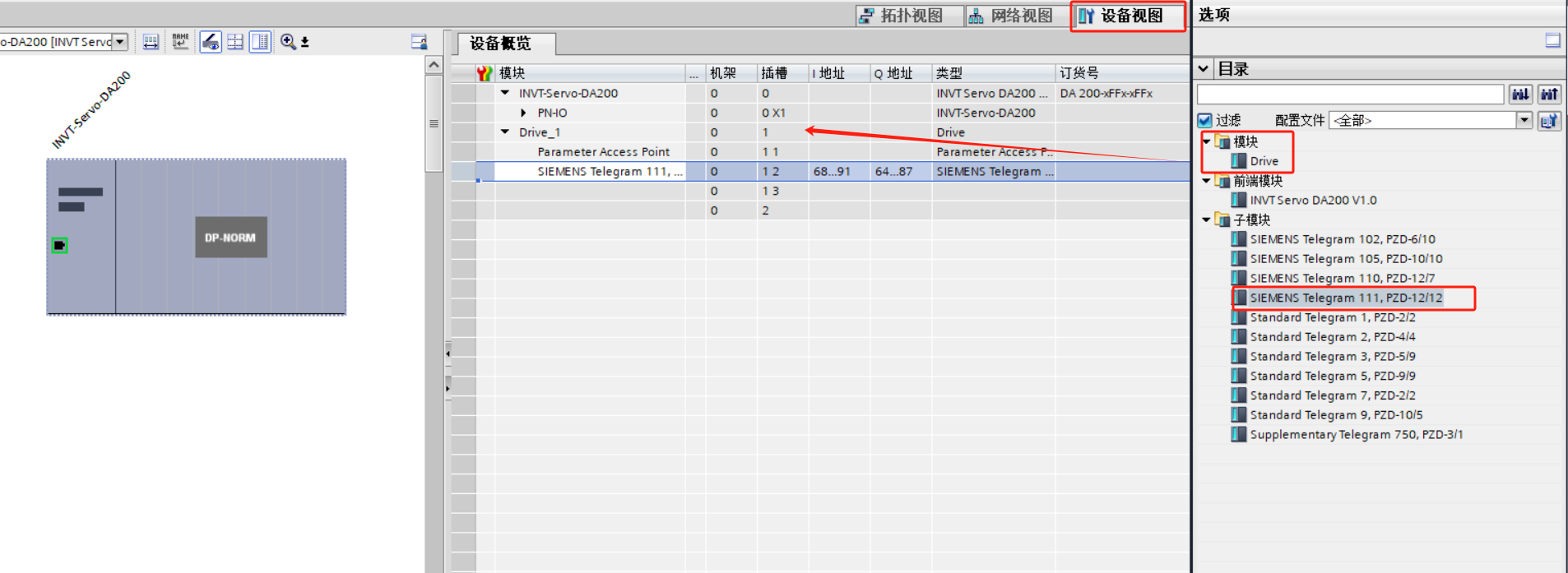
打开后,找到报文,修改成111,再打开西门子程序
1.1、调试软件需要修改的参数

P0.03 改成此模式
速度模式下的加减速时间

P0.54 55 这个加减速时间仅仅是速度模式下的时间,位置模式再继续寻找。
定位模式下的加减速时间

1.2、电子齿轮比参数设置
SIEMENS&INVT_FB284功能块测试
电子齿轮比参数设置:首先P0.22参数需要设置成0;P0.25为第一电子齿轮比分子,P0.25为电子齿轮比分母《===》公式:G1/G2=脉冲当量*{电机编码器分辨率/(1/减速比*减速机转一圈负载行走的距离)}
注:脉冲当量为1个脉冲设备行走的距离,用户单位(PUU)值
例:当前以脉冲当量位0.01mm为准,导程10,减速比3
电机实际转速等于R0.00:脉冲当量0.01mm(10μm)Velocity速度给定单位(1000PUU/min)/导程减速比
电机反馈位置等于R0.02:FB284给定位置(position)
FB284输出实际转速转化成实际电机的转速:ActVelocity电机额定转速(P8.02)/2^30
负载实际运行的速度:ActVelocity*电机额定转速(P8.02)/2^30/减速比
FB284输出实际位置(ActPosition)等于:FB284输入位置(Position)
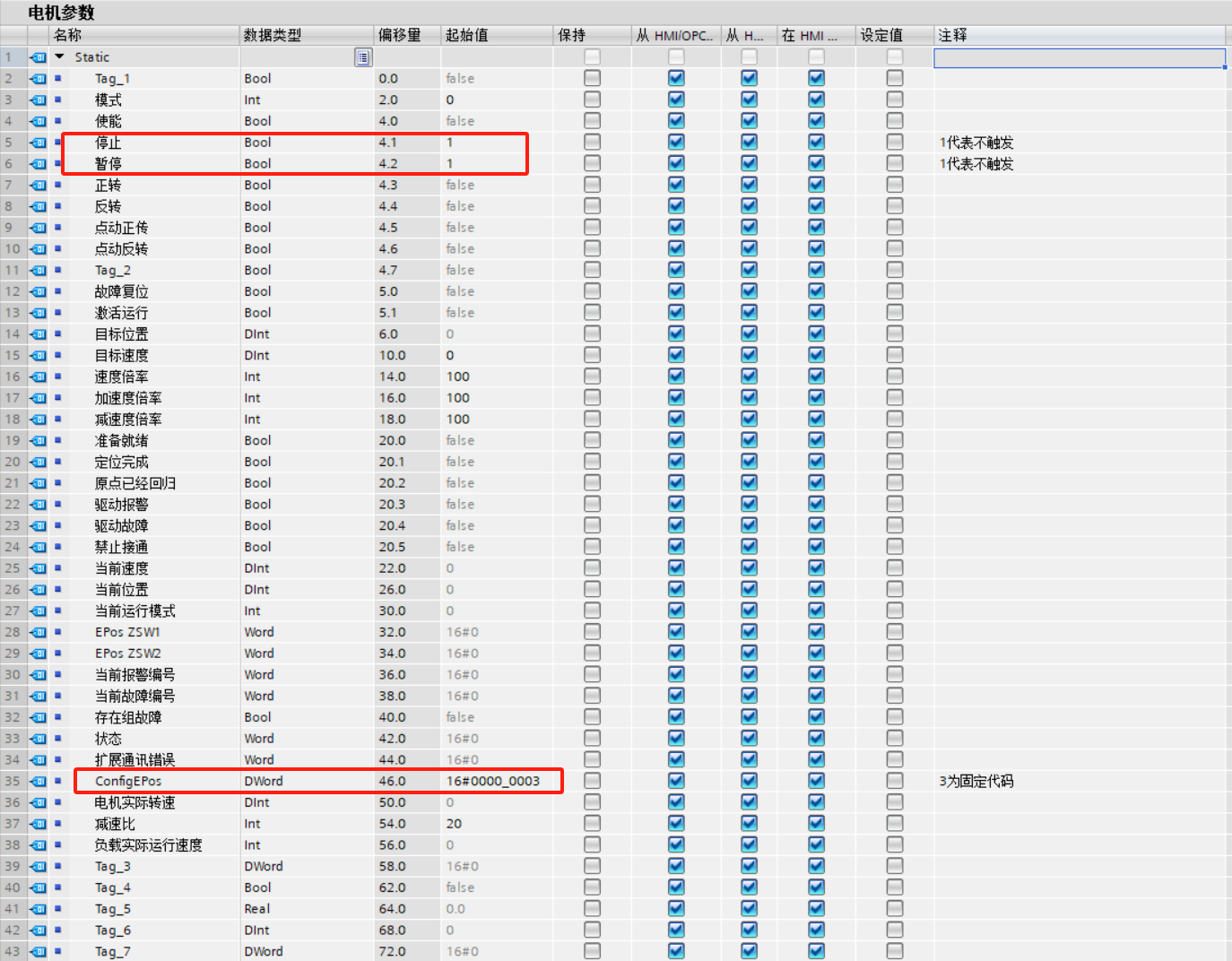
ConfigEPos=16#103时模式 2、3 时,位置、速度指令更改立即生效,不需触发。
ModePos=5时把当前位置设置成原点,P5.10设置成8,但是必须先将私服切换成位置模式,才能启作用。
位置模式:【(目标速度/额定转速)*加减速时间】/加减速倍率
速度模式:【(目标速度/额定转速)*加减速时间】*加减速倍率
固定挡块功能:ConfigEPOS.3=1(POS_STW2.15)(X3),ConfigEPOS.30=1(STW2.8)<===>ConfigEPOS=16#4000 000B
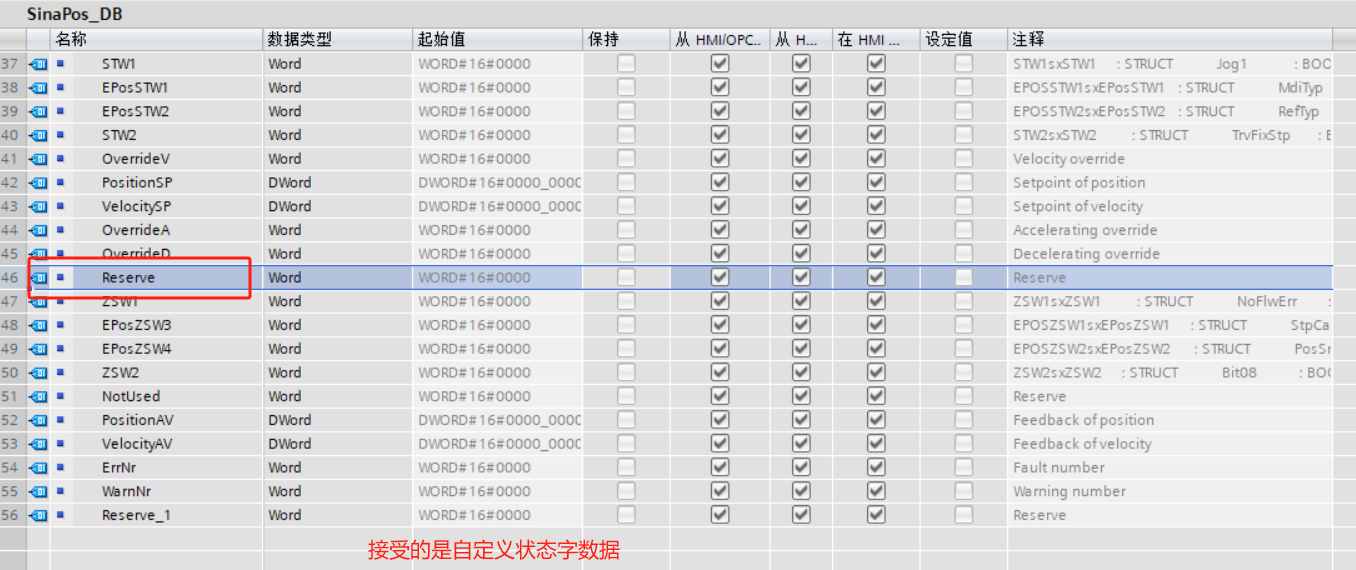
1.3、自定义状态字(当前转矩)
只能获取一个数据值,实时状态下,任意驱动电机和驱动器都只能获得一个自定义数据

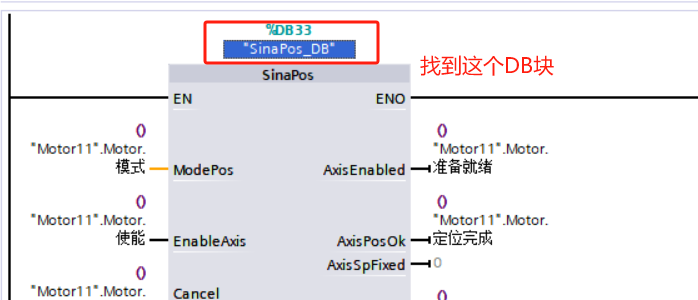

2、博途程序修改值
2.1、DB默认值
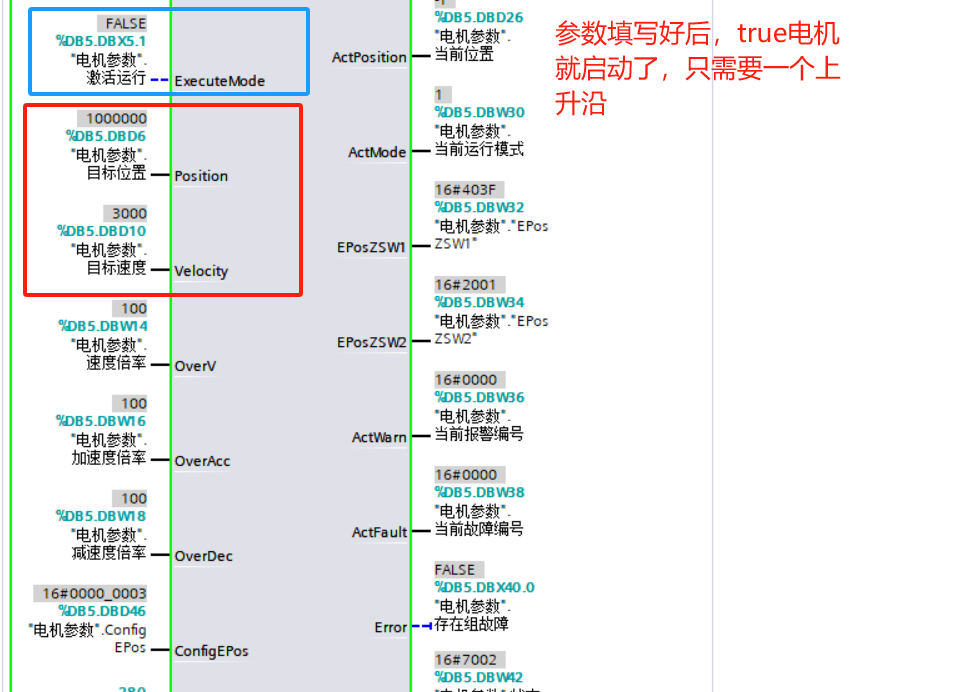
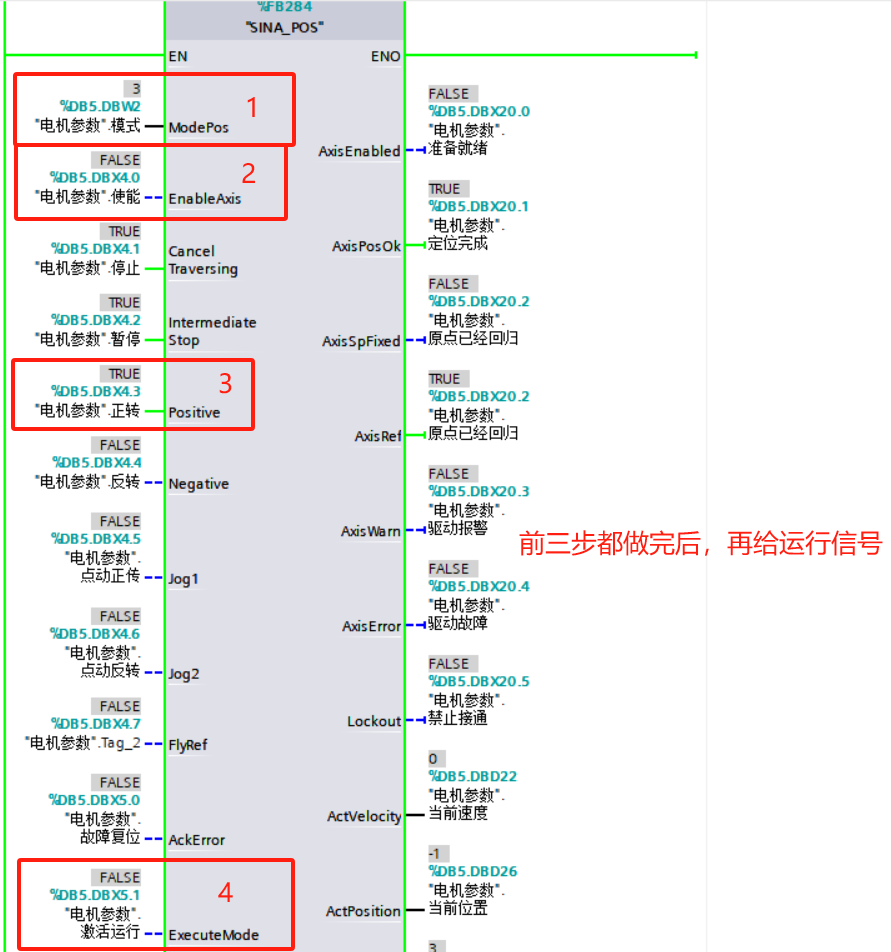
2.2、参数填写
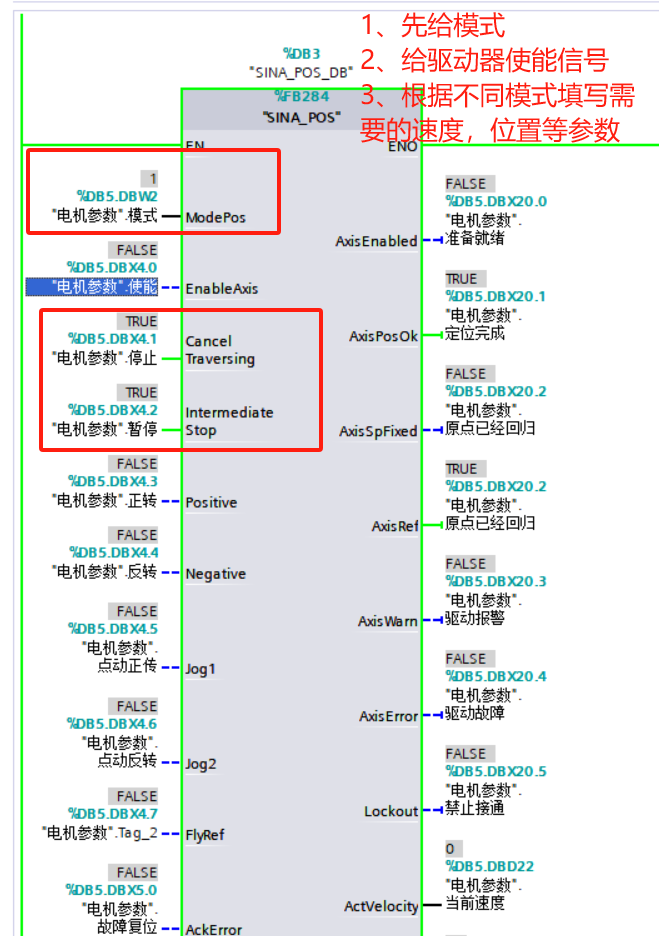
2.3、速度模式下电机的启动与停止
2.3.1、启动
2.3.2、停止
第一张方法:

第二种方法: 停止位给0就行

2.4、回零模式
2.4.1、当前位置回零
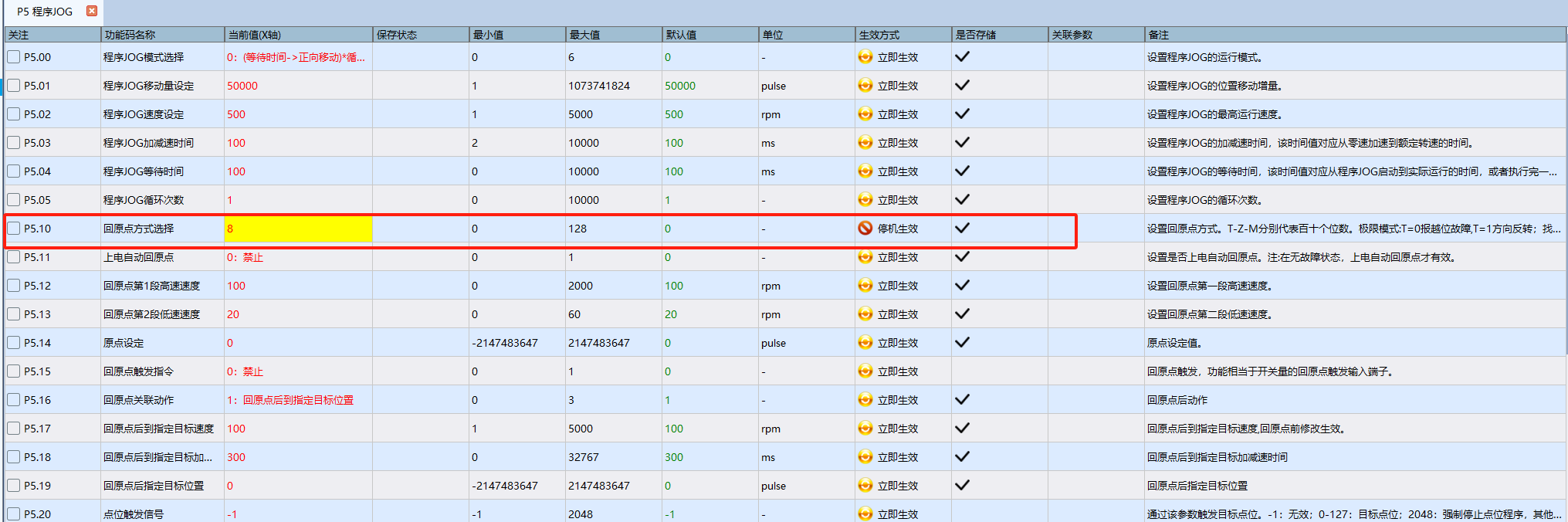
模式5,再说明书中有隐藏介绍,必须是(R0.32参数表看)位置模式下才可以归零。
如果前一次启动时选择速度模式3,紧接着就启用模式5,此时无法归零的,
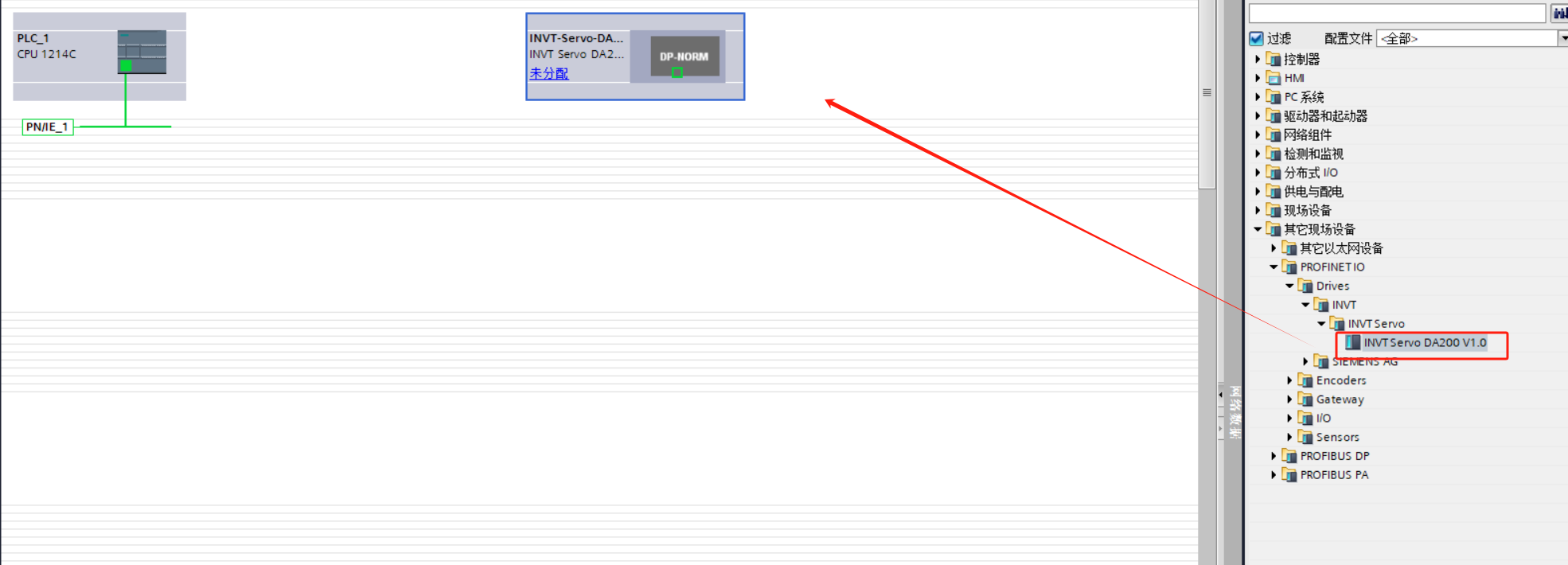
3、博途组态配置
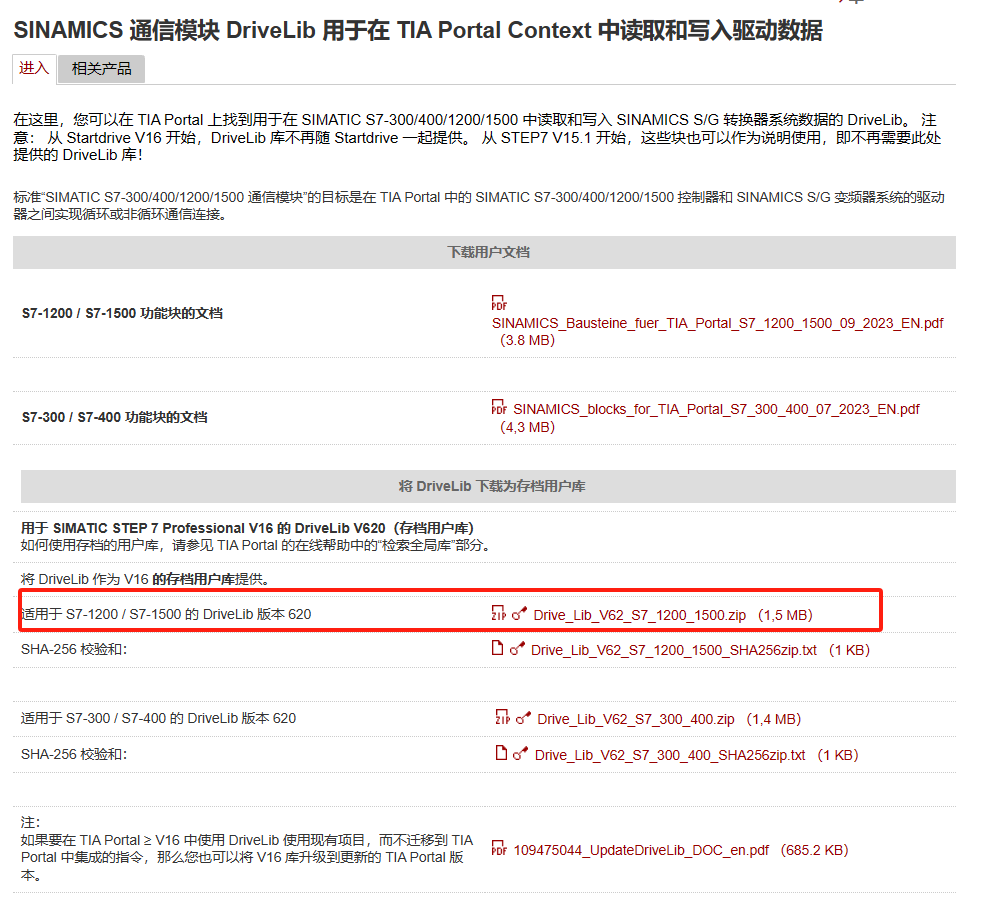
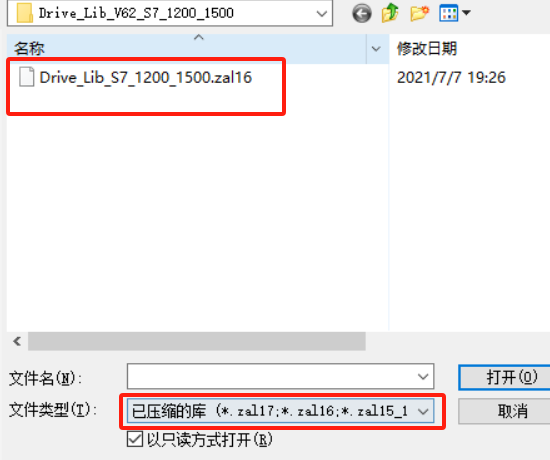
3.1、博途Drive全局库下载
西门子官网库,V16版本,打开的时候会自动升级
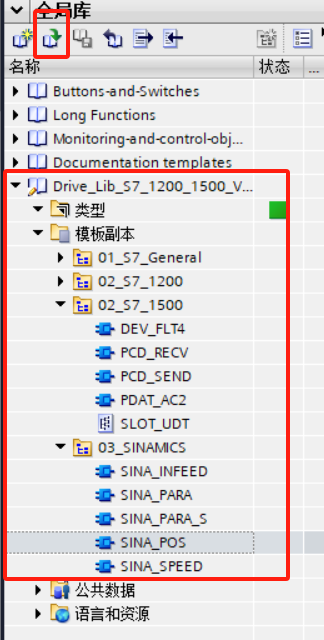
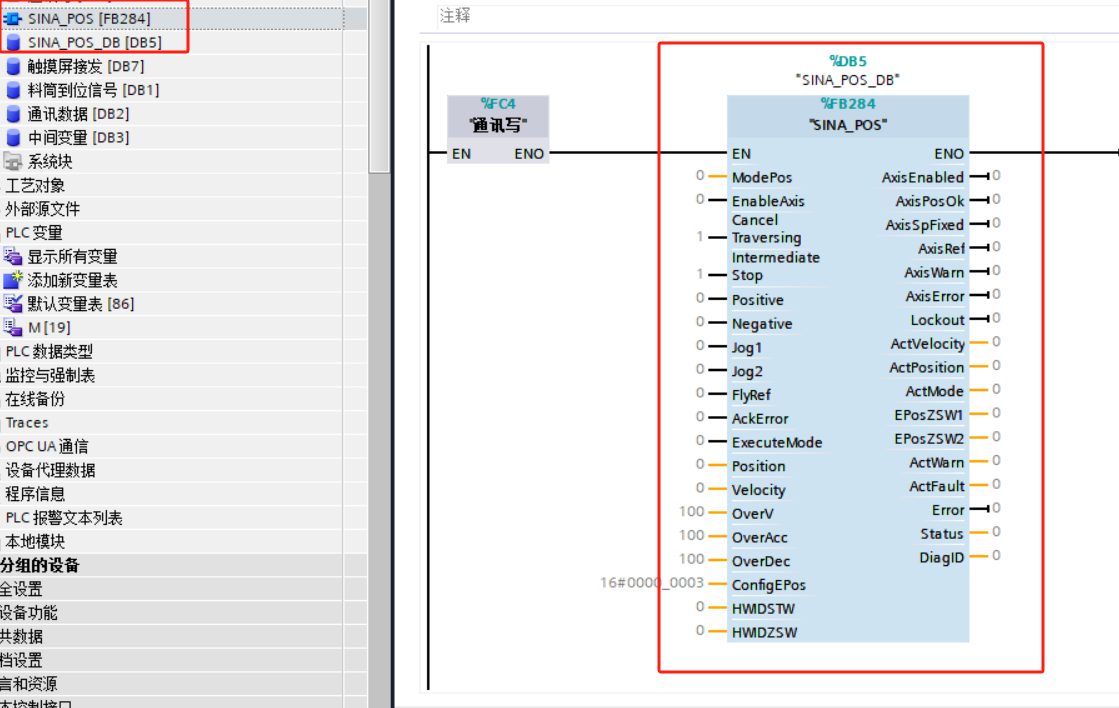
双击后自动产生FB块和DB块,FB块中自带程序
3.2、组态配置

















 717
717

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









