







- 相机拍摄更亮的照片的三种方法:大光圈,长曝光,闪光灯;其中大光圈导致小景深并且无法在智能手机中使用;长曝光在动态场景或者由于相机的抖动会导致模糊;闪光灯导致变色,并且只对近景有效;
- 还有一种方法是burst capturing,即短时间拍摄很多张,然后融合多张,但是在动态场景中会导致 ghosting effect;
- 还有一种方法是利用网络学习映射,但这需要大量数据集
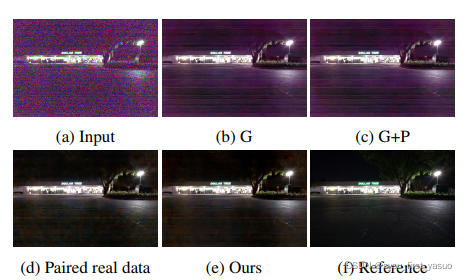
- 可以使用合成数据吗,但是需要对噪声进行正确的建模,heteroscedastic gaussian noise model(也就是"Practical Poissonian-Gaussian Noise Modeling and Fitting for Single-Image Raw-Data"文章中提出来的泊松-高斯噪声模型) 对正常光照场景下的噪声能正确建模,但对黑暗情况下的噪声无法正确拟合。如下图,c 是用泊松-高斯模型模拟的训练集训练后的 unet 对 a 进行去噪后的结果,可以看到还有横向条带状噪声没有去除。
- 文章贡献三点,一个是提出了一个新的噪声模型,一个是对该噪声模型的参数提供了计算方法,然后是提出了一个数据集 ELD
- 现有的去噪方法大多是遵从用深度学习来拟合人造数据集的模式,因此当噪声模型与实际噪声模式相差较大时,训练出来的模型不尽如人意。因此要么是采集真实的图像对,要么是提出更接近实际的噪声模型。
- 去噪模型提出历程:先是08年的"Practical Poissonian-Gaussian Noise Modeling and Fitting for Single-Image Raw-Data", 再是19年的"Enhancing Low Light Videos by Exploring High Sensitivity Camera Noise",然后是这一篇,相比前面两篇,本文认为前面的简化了现代传感器的成像流程,特别是 camera electronics 导致的噪声
- 数码相机得到的 raw image D D D 总的成像公式是一个线性模型: D = K I + N , D = KI+N, D=KI+N,其中 I I I是与环境照度成正比的激发态的光电子, K K K是由模拟增益和数字增益导致的总的系统增益, N N N是包括相机和光导致的各种噪声来源的总和。这里要注意,文章研究的是raw data的噪声,也就是还没有经过任何的相机内置的去噪后处理之前的原始信号。
- 模型基于CMOS 传感器进行成像的相机(老数码相机是CCD的,现在数码相机基本都是CMOS了),文章考虑的成像过程包括从入射光到激发出的电子,到电压,到raw data的像素值,这一过程。
从光子到电子
- 冲击到传感器上的光子都能激发出成比例的电子,但由于光子的粒子性,打到传感器上的光子的数量存在着一定的随机性,但期望与光强成正比,这一随机性满足泊松分布的定义,因此可以用下面这一公式建模这一过程: ( I + N p ) ∼ P ( I ) , (I+N_p)\sim P(I), (I+Np)∼P(I),其中 N p N_p Np可以称之为 photon shot noise, P P P表示泊松分布,因此 N p N_p Np与光强 I I I有关。
- 其实在这一过程中还有其它类型的噪声,比如 photo response nonuniformity(响应的不均匀性) 和 dark current noise(暗电流噪声,指没有入射光时光电传感器上的残存电流) N d N_d Nd。随着CMOS传感器设计和制造技术的进步如暗电流抑制技术,在新一代单反相机上这两个效应越来越小,因此本文忽视第一个效应,假设响应是均匀的;同时将暗电流噪声 N d N_d Nd合并到下一段的 N r e a d N_{read} Nread中。
从电子到电压
- 在这一阶段,激发的电子在曝光结束时被收集、集成(integrated)、放大,然后作为可测的电荷或电压被读出。在这一阶段出现的噪声与电路设计和处理技术有关,因此被称为 pixel circuit noise,包括了thermal noise(热噪声), reset noise, source follower noise(源极跟随噪声,指半导体硅晶格的阱在捕获或放出载流子时的随机性) 和 banding pattern noise(即上面图片中的带状噪声,与COMS电路的输出模式和放大器有关)。
- 为了模拟这一阶段的噪声,首先将暗电流噪声、热噪声和源极跟随噪声的和拟合为一项 N r e a d N_{read} Nread: N r e a d = N d + N t + N s . N_{read}=N_d+N_t+N_s. Nread=Nd+Nt+Ns.经过统计,该噪声服从一个均值为0的长尾分布,因此用 Tukey Lambda 分布来拟合: N r e a d ∼ T L ( λ ; 0 , σ T L ) , N_{read}\sim TL(\lambda;0,\sigma_{TL}), Nread∼TL(λ;0,σTL),
- 然后是带状噪声 N r N_r Nr,其实包含纵轴上的和横轴上的,但是竖着的带状噪声可以忽略不计,因此只对横着的带状噪声用0均值高斯分布进行模拟,方差为 σ r \sigma_r σr
从电压到数字
- 由于使用了ADC进行了数模转换,因此存在精度损失,这一损失带来的噪声建模为 N q N_q Nq,服从均匀分布: N q ∼ U ( − 1 / 2 q , 1 / 2 q ) , N_q\sim U(-1/2q, 1/2q), Nq∼U(−1/2q,1/2q),其中q是量化步长
- 综上,噪声可以被建模为: N = K N p + N r e a d + N r + N q , N=KN_p+N_{read}+N_r+N_q, N=KNp+Nread+Nr+Nq,其中 K K K为系统增益。
评估噪声参数
未完待续














 1142
1142











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









