







 本文介绍了医学图像处理中的关键坐标体系——解剖学空间坐标,重点讲解了RAS和LPS坐标系的区别及其在医学软件中的应用,特别强调了在Unity中从LPS到RAS的转换问题。
本文介绍了医学图像处理中的关键坐标体系——解剖学空间坐标,重点讲解了RAS和LPS坐标系的区别及其在医学软件中的应用,特别强调了在Unity中从LPS到RAS的转换问题。
对医学图像处理技术来说,最重要的坐标体系是解剖学空间坐标体系。这个坐标体系由三个位面组成,用来描述标准的人体在解剖学上的位置。在解剖学坐标系中,单位基本都是mm。
由上图知,RAS是右手坐标系,LAS是左手坐标系, LPS什么也不是只是Dicom中专用罢了。
Unity是左手坐标系,但医学图像软件没有一个是LAS的,因此都需要经转换之苦。
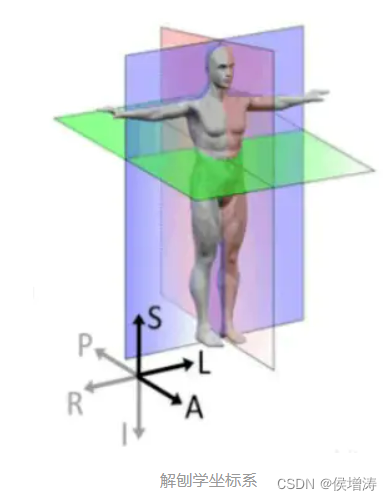
解刨学坐标系
横断面(The axial plane):与地面平行,分离头部(Superior)与脚部(Inferior);
冠状面(The coronal plane):与地面垂直,分离人体的前(Anterior)后(Posterior);
矢状面(The sagittal plane):与地面垂直,分离人体的左(Left)右(Right)
这个解剖学坐标体系是一个连续的三维空间,在这个空间中,图像被采样。在神经成像中,3D基本上通过解剖轴Anterior-Posterior,Inferior-Superior,Left-Right来定义。对这些位面来 都以正向标记。(如S轴 --Superior的负面呈现为I轴--Inferior)
不同医学应用软件运用不同的3D基本定义。从根本上来说,这两种坐标轴(LPS和RAS)是等价使用的,有着相同的逻辑,但是有必要知道图像到底引用了哪种坐标轴。RAS与LPS类似,不同的是两个轴翻了个头。
1)LPS(Left,Posterior,Superior),主要用于Dicom与ITK工具包上
2)RAS(Right,Anterior,Superior),主要3D Slicer用RAS,在STL导出OBJ格式的时候slicer提供了坐标系LPS和RAS两个选项(LPS简直是扯淡,我原来还误以为它是左手坐标系呢,在Unity 中啥都对不上,嗨,只能受苦选RAS,然后再用代码在UNITY中转换了)。
部分参考链接:https://www.jianshu.com/p/b8fe11a33319

















 3404
3404

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









