







文章目录
学习资料:
z域分析(注意与s域类比)
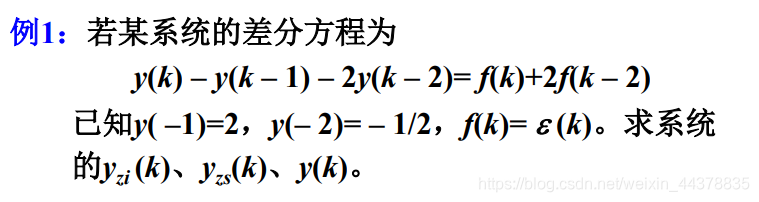
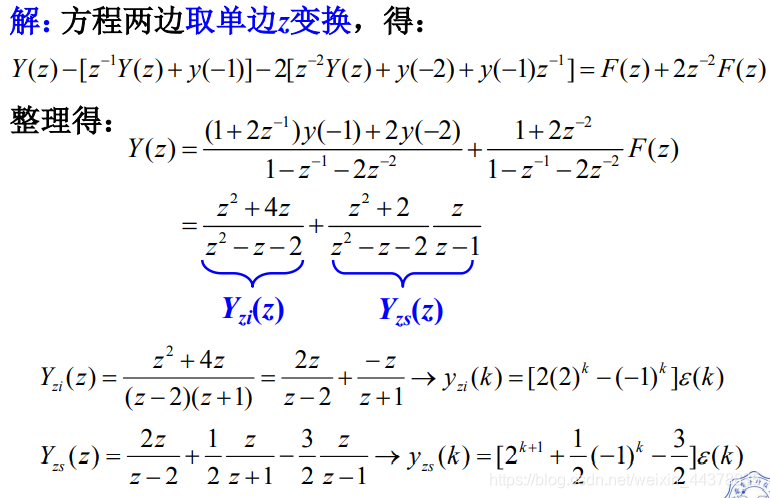
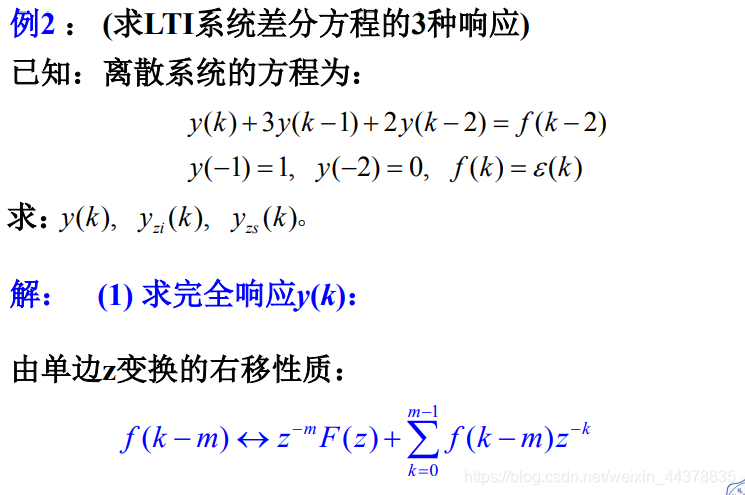
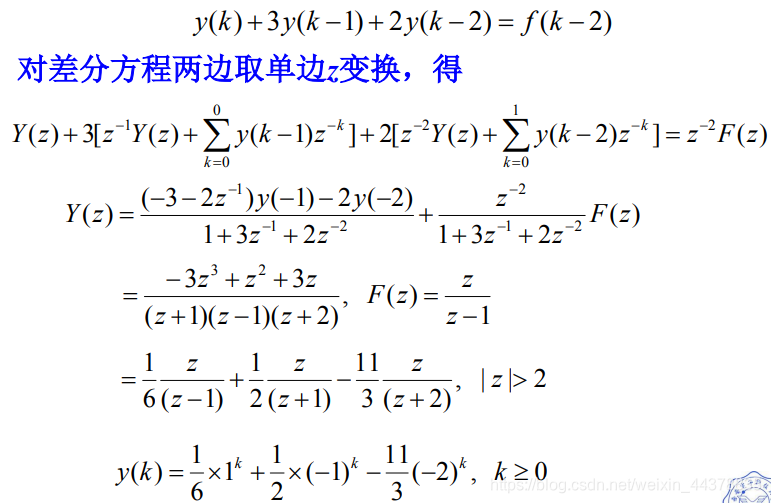
1 差分方程的z变换解
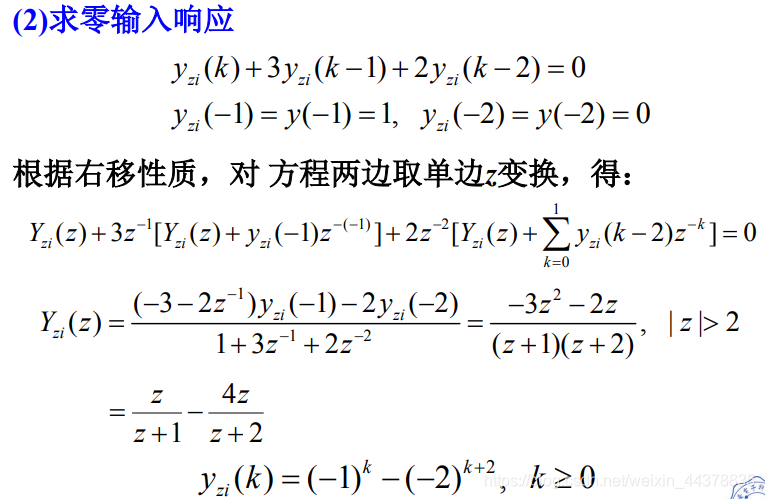
单边 z z z变换将系统的初始条件自然地包含于其代数方程中,故可求系统的零输入、零状态响应和全响应。
∑ i = 0 n a n − i y ( k − i ) = ∑ j = 0 m b m − j f ( k − j ) \sum_{i=0}^{n} a_{n-i} y(k-i)=\sum_{j=0}^{m} b_{m-j} f(k-j) i=0∑nan−iy(k−i)=j=0∑mbm−jf(k−j)
设 f ( k ) f(k) f(k)在 k = 0 k=0 k=0时接入,系统初始状态为 y ( − 1 ) , y ( − 2 ) , . . . y ( − n ) y(-1),y(-2),...y(-n) y(−1),y(−2),...y(−n)
取单边 z 变换得:
∑ i = 0 n a n − i [ z − i Y ( z ) + ∑ k = 0 i − 1 y ( k − i ) z − i ] = ∑ j = 0 m b m − j [ z − j F ( z ) ] \sum_{i=0}^{n} a_{n-i}\left[z^{-i} Y(z)+\sum_{k=0}^{i-1} y(k-i) z^{-i}\right]=\sum_{j=0}^{m} b_{m-j}\left[z^{-j} F(z)\right] i=0∑nan−i[z−iY(z)+k=0∑i−1y(k−i)z−i]=j=0∑mbm−j[z−jF(z)]
[ ∑ i = 0 n a n − i z − i ] Y ( z ) + ∑ i = 0 n a n − i [ ∑ k = 0 i − 1 y ( k − i ) z − k ] = ( ∑ j = 0 m b m − j z − j ) F ( z ) \left[\sum_{i=0}^{n} a_{n-i} z^{-i}\right] Y(z)+\sum_{i=0}^{n} a_{n-i}\left[\sum_{k=0}^{i-1} y(k-i) z^{-k}\right]=\left(\sum_{j=0}^{m} b_{m-j} z^{-j}\right) F(z) [i=0∑nan−iz−i]Y(z)+i=0∑nan−i[k=0∑i−1y(k−i)z−k]=(j=0∑mbm−jz−j)F(z)
Y ( z ) = M ( z ) A ( z ) + B ( z ) A ( z ) F ( z ) = Y z i ( z ) + Y z s ( z ) Y(z)=\frac{M(z)}{A(z)}+\frac{B(z)}{A(z)} F(z)=Y_{z i}(z)+Y_{z s}(z) Y(z)=A(z)M(z)+A(z)B(z)F(z)=Yzi(z)+Yzs(z)
系统函数:
H
(
z
)
=
Y
z
s
(
z
)
F
(
z
)
=
B
(
z
)
A
(
z
)
H(z)=\frac{Y_{z s}(z)}{F(z)}=\frac{B(z)}{A(z)}
H(z)=F(z)Yzs(z)=A(z)B(z)
h ( k ) ← → H ( z ) h(k) \leftarrow \rightarrow H(z) h(k)←→H(z)

2 系统函数 H ( z ) H(z) H(z)
分解 f ( k ) = 1 2 π j ∮ F ( z ) z z k d z , − ∞ < k < ∞ f(k)=\frac{1}{2 \pi j} \oint \frac{F(z)}{z} z^{k} d z, \quad-\infty<k<\infty f(k)=2πj1∮zF(z)zkdz,−∞<k<∞
任意信号可以分解为基本信号 z k z^k zk的线性组合,基本信号 z k z^k zk通过系统产生响应 z k H ( z ) z^kH(z) zkH(z)
基本信号:
1
2
π
j
F
(
z
)
z
z
k
→
1
2
π
j
F
(
z
)
z
⋅
z
k
⋅
H
(
z
)
\frac{1}{2\pi j}\frac{F(z)}{z}z^k\rightarrow \frac{1}{2\pi j}\frac{F(z)}{z}\cdot z^k\cdot H(z)
2πj1zF(z)zk→2πj1zF(z)⋅zk⋅H(z)
积分:
∮
1
2
π
j
F
(
z
)
z
d
z
→
∮
1
2
π
j
F
(
z
)
z
⋅
z
k
⋅
H
(
z
)
d
z
=
∮
1
2
π
j
F
(
z
)
⋅
H
(
z
)
z
⋅
z
k
d
z
\oint\frac{1}{2\pi j}\frac{F(z)}{z}dz\rightarrow \oint\frac{1}{2\pi j}\frac{F(z)}{z}\cdot z^k\cdot H(z)dz=\oint\frac{1}{2\pi j}\frac{F(z)\cdot H(z)}{z}\cdot z^kdz
∮2πj1zF(z)dz→∮2πj1zF(z)⋅zk⋅H(z)dz=∮2πj1zF(z)⋅H(z)⋅zkdz
1、定义:
H
(
z
)
=
Y
z
s
(
z
)
F
(
z
)
H(z)=\frac{Y_{z s}(z)}{F(z)}
H(z)=F(z)Yzs(z)
2、物理意义:
H
(
z
)
=
Z
[
h
(
k
)
]
H(z)=\mathscr{Z}[h(k)]
H(z)=Z[h(k)]
3、计算方法:
(1) H ( z ) = Y z s ( z ) F ( z ) H(z)=\frac{Y_{z s}(z)}{F(z)} H(z)=F(z)Yzs(z)
(2) H ( z ) = Z [ h ( k ) ] H(z)=\mathscr{Z}[h(k)] H(z)=Z[h(k)]
(3) 由系统差分方程求 H ( z ) H(z) H(z)
核心:输入信号的z变换乘系统函数等于输出零状态响应的z变换。然后再反变换。
4、系统函数 H ( z ) H(z) H(z)的应用:
(1) y z s ( k ) = z − 1 [ Y z s ( z ) ] , Y z s ( z ) = H ( z ) F ( z ) y_{z s}(k)=\mathscr{z}^{-1}\left[Y_{z s}(z)\right], Y_{z s}(z)=H(z) F(z) yzs(k)=z−1[Yzs(z)],Yzs(z)=H(z)F(z)
(2) h ( k ) = Z − 1 [ H ( z ) ] h(k)=\mathscr{Z}^{-1}[H(z)] h(k)=Z−1[H(z)]
(3) f ( k ) = z − 1 [ F ( z ) ] , F ( z ) = Y z s ( z ) H ( z ) f(k)=\mathscr{z}^{-1}[F(z)], F(z)=\frac{Y_{z s}(z)}{H(z)} f(k)=z−1[F(z)],F(z)=H(z)Yzs(z)
(4)表示系统特性:频率特性、稳定性等。
3 系统函数与系统特性
1、离散系统的零点和极点:
H
(
z
)
=
B
(
z
)
A
(
z
)
=
b
m
z
m
+
b
m
−
1
z
m
−
1
+
⋯
+
b
0
z
n
+
a
n
−
1
z
n
−
1
+
⋯
+
a
0
H(z)=\frac{B(z)}{A(z)}=\frac{b_{m} z^{m}+b_{m-1} z^{m-1}+\cdots+b_{0}}{z^{n}+a_{n-1} z^{n-1}+\cdots+a_{0}}
H(z)=A(z)B(z)=zn+an−1zn−1+⋯+a0bmzm+bm−1zm−1+⋯+b0
=
b
m
(
z
−
ξ
1
)
(
z
−
ξ
2
)
⋯
(
z
−
ξ
m
)
(
z
−
P
1
)
(
z
−
P
2
)
⋯
(
z
−
P
n
)
=
b
m
∏
j
=
1
m
(
z
−
ξ
j
)
∏
i
=
1
n
(
z
−
P
i
)
,
m
≤
n
=\frac{b_{m}\left(z-\xi_{1}\right)\left(z-\xi_{2}\right) \cdots\left(z-\xi_{m}\right)}{\left(z-P_{1}\right)\left(z-P_{2}\right) \cdots\left(z-P_{n}\right)}=\frac{b_{m} \prod_{j=1}^{m}\left(z-\xi_{j}\right)}{\prod_{i=1}^{n}\left(z-P_{i}\right)}, \quad m \leq n
=(z−P1)(z−P2)⋯(z−Pn)bm(z−ξ1)(z−ξ2)⋯(z−ξm)=∏i=1n(z−Pi)bm∏j=1m(z−ξj),m≤n
其中:
ξ
i
,
i
=
1
,
2
,
⋯
,
m
\xi_{i} \quad, \quad i=1,2, \cdots, \quad m
ξi,i=1,2,⋯,m称为
H
(
z
)
H(z)
H(z)的零点
p j , j = 1 , 2 , ⋯ , n p_{j} \quad, \quad j=1,2, \cdots, n pj,j=1,2,⋯,n称为 H ( z ) H(z) H(z)的极点(极:极大)
零/极点的种类:实数、复数 (复数零、极点必共轭 )一阶、二阶及二阶以上极点
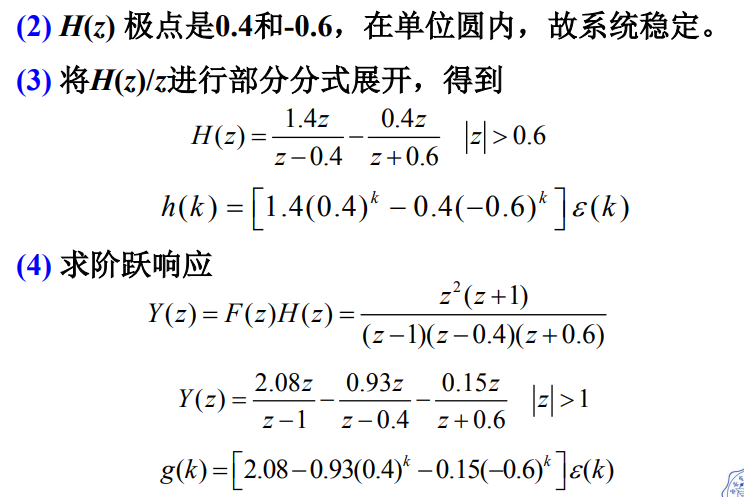
2、离散系统 H ( z ) H(z) H(z)的零、极点与 h ( k ) h(k) h(k)的的关系:
(1)单位圆内的极点:
在实轴上:
- 一阶极点: A z z − a → A a k ε ( k ) , ∣ a ∣ < 1 \frac{A z}{z-a} \rightarrow A a^{k} \varepsilon(k), \quad \textcolor{blue}{|a|<1} z−aAz→Aakε(k),∣a∣<1
- 二阶极点: A z ( z − a ) 2 → A k a k ε ( k ) \frac{A z}{(z-a)^{2}} \rightarrow A k a^{k} \varepsilon(k) (z−a)2Az→Akakε(k)
不在实轴上:
-
一阶极点: A 1 z z − r e j β + A 1 ∗ z z − r e − j β → 2 ∣ A 1 ∣ r k cos ( β k + θ ) ε ( k ) , r < 1 \frac{A_{1} z}{z-r e^{j \beta}}+\frac{A_{1}^{*} z}{z-r e^{-j \beta}} \rightarrow 2\left|A_{1}\right| r^{k} \cos (\beta k+\theta) \varepsilon(k), \quad \textcolor{blue}{r<1} z−rejβA1z+z−re−jβA1∗z→2∣A1∣rkcos(βk+θ)ε(k),r<1
-
二阶极点: A 1 z ( z − r e j β ) 2 + A 1 ∗ z ( z − r e − j β ) 2 → 2 ∣ A 1 ∣ r k − 1 cos [ β ( k − 1 ) + θ ] ε ( k ) \frac{A_{1} z}{\left(z-r e^{j \beta}\right)^{2}}+\frac{A_{1}^{*} z}{\left(z-r e^{-j \beta}\right)^{2}} \rightarrow 2\left|A_{1}\right| r^{k-1} \cos [\beta(k-1)+\theta] \varepsilon(k) (z−rejβ)2A1z+(z−re−jβ)2A1∗z→2∣A1∣rk−1cos[β(k−1)+θ]ε(k)
(2)单位圆上的极点:
在实轴上:
- 一阶极点: A z z ± 1 ↔ A ( ± 1 ) k ε ( k ) \frac{A z}{z \pm 1} \leftrightarrow A(\pm 1)^{k} \varepsilon(k) z±1Az↔A(±1)kε(k)
- 二阶极点: A z ( z ± 1 ) 2 ↔ A k ( ± 1 ) k ε ( k ) \frac{A z}{(z \pm 1)^{2}} \leftrightarrow A \textcolor{red}{k}(\pm 1)^{k} \varepsilon(k) (z±1)2Az↔Ak(±1)kε(k)
不在实轴上:
- 一阶极点: A z z − r e j β + A ∗ z z − r e − j β ↔ 2 ∣ A ∣ cos ( β k + θ ) ε ( k ) \frac{A z}{z-r e^{j \beta}}+\frac{A^{*} z}{z-r e^{-j \beta} \leftrightarrow} 2|A| \cos (\beta k+\theta) \varepsilon(k) z−rejβAz+z−re−jβ↔A∗z2∣A∣cos(βk+θ)ε(k)
- 二阶极点: A z ( z − r e j β ) 2 + A ∗ z ( z − r e − j β ) 2 ↔ 2 ∣ A ∣ k cos [ β ( k − 1 ) + θ ] ε ( k ) \frac{A z}{\left(z-r e^{j \beta}\right)^{2}}+\frac{A^{*} z}{\left(z-r e^{-j \beta}\right)^{2}} \leftrightarrow 2|A| \textcolor{red}{k} \cos [\beta(k-1)+\theta] \varepsilon(k) (z−rejβ)2Az+(z−re−jβ)2A∗z↔2∣A∣kcos[β(k−1)+θ]ε(k)
(3)单位圆外的极点:
在实轴上:
A
z
z
−
a
↔
A
a
k
ε
(
k
)
,
∣
a
∣
>
1
\frac{A z}{z-a} \leftrightarrow A a^{k} \varepsilon(k),\textcolor{blue}{|a|>1}
z−aAz↔Aakε(k),∣a∣>1
A
z
(
z
−
a
)
2
↔
A
k
a
k
−
1
ε
(
k
)
\frac{A z}{(z-a)^{2}} \leftrightarrow A k a^{k-1} \varepsilon(k)
(z−a)2Az↔Akak−1ε(k)
不在实轴上:
A
z
z
−
r
e
j
β
+
A
′
′
z
z
−
r
e
−
j
β
↔
2
∣
A
∣
r
k
cos
(
β
k
+
θ
)
ε
(
k
)
,
r
>
1
\frac{A z}{z-r e^{j \beta}}+\frac{A^{\prime \prime} z}{z-r e^{-j \beta}} \leftrightarrow 2|A| r^{k} \cos (\beta k+\theta) \varepsilon(k), \textcolor{blue}{r>1}
z−rejβAz+z−re−jβA′′z↔2∣A∣rkcos(βk+θ)ε(k),r>1
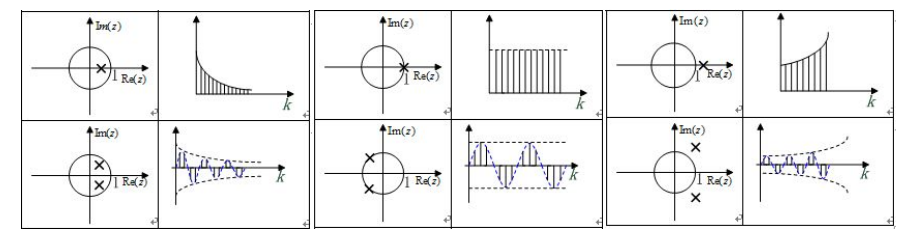
结论:
(1)
H
(
z
)
H(z)
H(z)的极点在单位圆内,对应
h
(
k
)
h(k)
h(k)按指数规律衰减;
(2)
H
(
z
)
H(z)
H(z)的极点在单位圆上:
- 一阶极点对应 h ( k ) h(k) h(k)为稳态分量;
- 二阶及二阶以上极点对应 h ( k ) h(k) h(k)增长。
(3) H ( z ) H(z) H(z)的极点在单位圆外,对应 h ( k ) h(k) h(k)按指数规律增长。
4 离散系统稳定性判据
(1) 离散系统稳定的时域充要条件:
∑
k
=
−
∞
∞
∣
h
(
k
)
∣
<
∞
\sum_{k=-\infty}^{\infty}|h(k)|<\infty
k=−∞∑∞∣h(k)∣<∞
(2) 离散系统稳定性的Z域充要条件:
若LTI离散系统的系统函数
H
(
z
)
H(z)
H(z)的收敛域包含单位圆,则系统为稳定系统。
若LTI离散因果系统稳定,要求其系统函数
H
(
z
)
H(z)
H(z)的极
点全部在单位圆内
F
(
z
)
=
z
z
−
1
F(z)=\frac{z}{z-1}
F(z)=z−1z
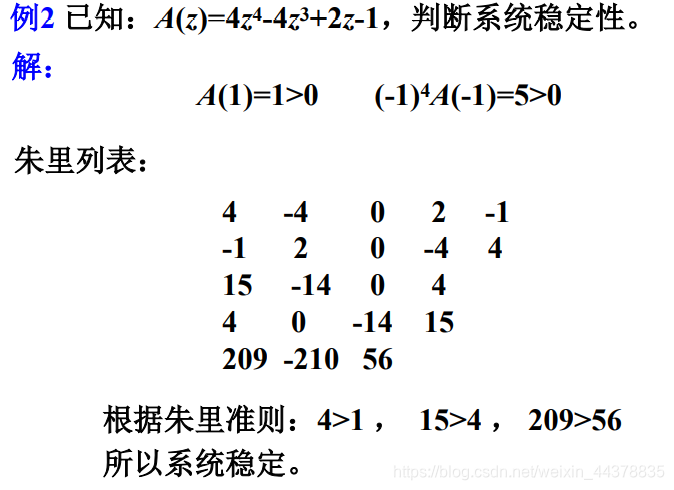
(3) 离散因果系统稳定性判定--朱里准则
H ( z ) = B ( z ) A ( z ) = b m z m + b m − 1 z m − 1 + ⋯ + b 0 a n z n + a n − 1 z n − 1 + ⋯ + a 0 H(z)=\frac{B(z)}{A(z)}=\frac{b_{m} z^{m}+b_{m-1} z^{m-1}+\cdots+b_{0}}{a_{n} z^{n}+a_{n-1} z^{n-1}+\cdots+a_{0}} H(z)=A(z)B(z)=anzn+an−1zn−1+⋯+a0bmzm+bm−1zm−1+⋯+b0
要判断 A ( z ) = 0 A(z)=0 A(z)=0的所有根的绝对值是否都小于1。
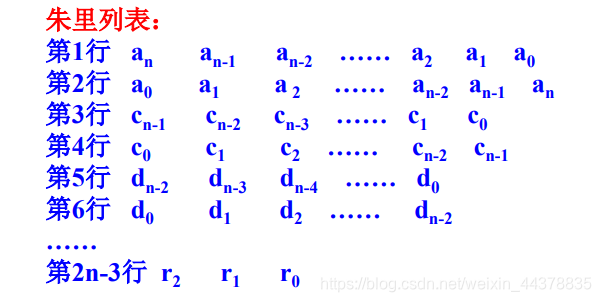
第3行按下列规则计算:
c
n
−
1
=
∣
a
n
a
0
a
0
a
n
∣
c
n
−
2
=
∣
a
n
a
1
a
0
a
n
−
1
∣
c
n
−
3
=
∣
a
n
a
2
a
0
a
n
−
2
∣
⋯
c_{n-1}=\left|\begin{array}{cc}a_{n} & a_{0} \\a_{0} & a_{n}\end{array}\right| \quad c_{n-2}=\left|\begin{array}{cc}a_{n} & a_{1} \\a_{0} & a_{n-1}\end{array}\right| \quad c_{n-3}=\left|\begin{array}{cc}a_{n} & a_{2} \\a_{0} & a_{n-2}\end{array}\right| \quad \cdots
cn−1=
ana0a0an
cn−2=
ana0a1an−1
cn−3=
ana0a2an−2
⋯
一直到第 2 n − 3 2n-3 2n−3行,该行有3个元素。
朱里准则指出:
A
(
z
)
=
0
A(z)=0
A(z)=0的所有根都在单位圆内的充要条件是:
(1) A ( 1 ) > 0 A(1)>0 A(1)>0
(2) ( − 1 ) n A ( − 1 ) > 0 (-1)^{n} A(-1)>0 (−1)nA(−1)>0
(3) a n > ∣ a 0 ∣ c n − 1 > ∣ c 0 ∣ d n − 2 > ∣ d 0 ∣ … … r 2 > ∣ r 0 ∣ \begin{array}{llll}a_{n}>\left|a_{0}\right| & c_{n-1}>\left|c_{0}\right| & d_{n-2}>\left|d_{0}\right| \ldots \ldots & r_{2}>\left|r_{0}\right|\end{array} an>∣a0∣cn−1>∣c0∣dn−2>∣d0∣……r2>∣r0∣
对奇数行,其第1个元素必大于最后一个元素的绝对值。
特例:对二阶系统: A ( z ) = a 2 z 2 + a 1 z + a 0 A(z)=a_{2} z^{2}+a_{1} z+a_{0} A(z)=a2z2+a1z+a0,易得 A ( 1 ) > 0 , A ( − 1 ) > 0 , a 2 > ∣ a 0 ∣ A(1)>0, A(-1)>0, a_{2}>\left|a_{0}\right| A(1)>0,A(−1)>0,a2>∣a0∣
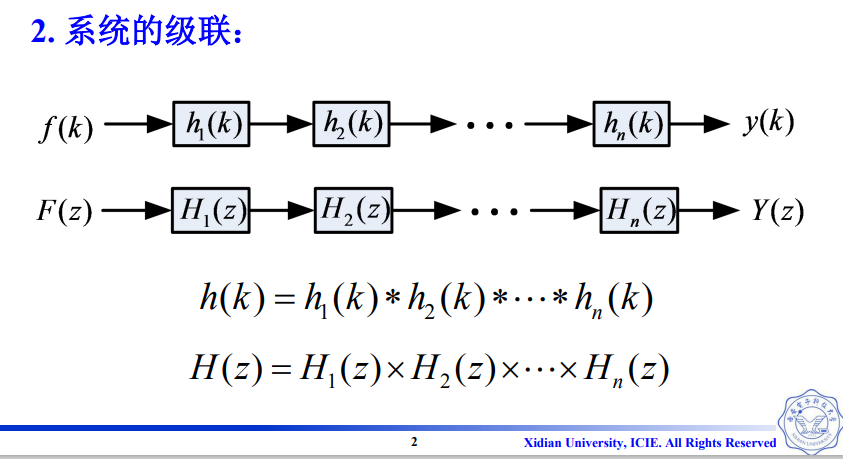
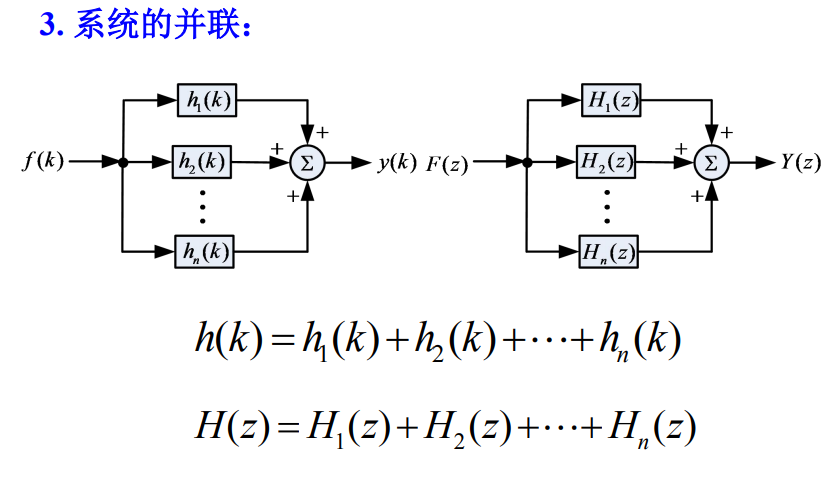
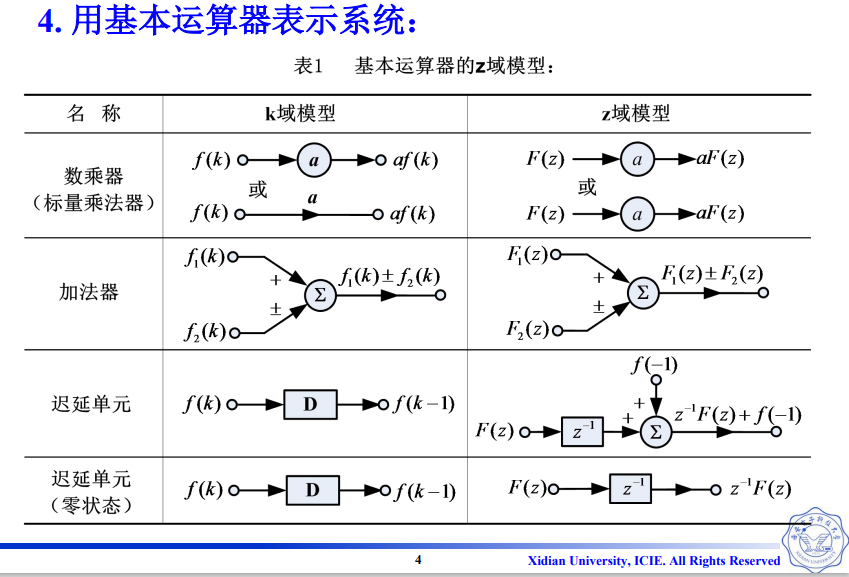
5 系统的方框图

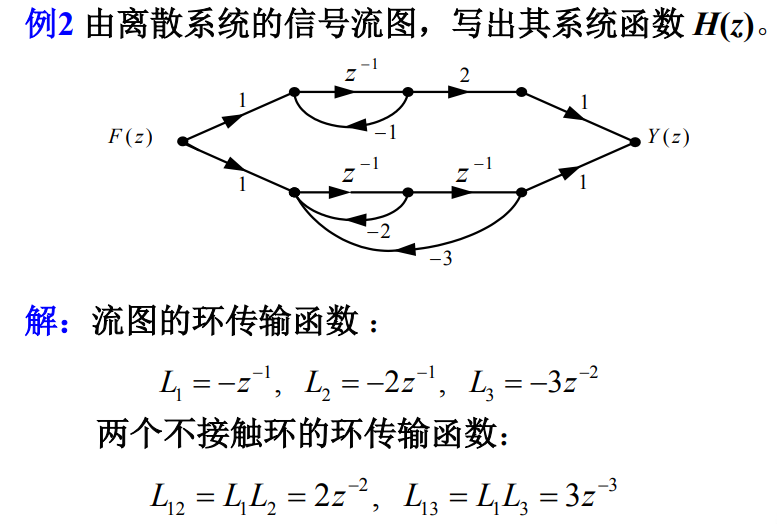
6 系统的z域信号流图
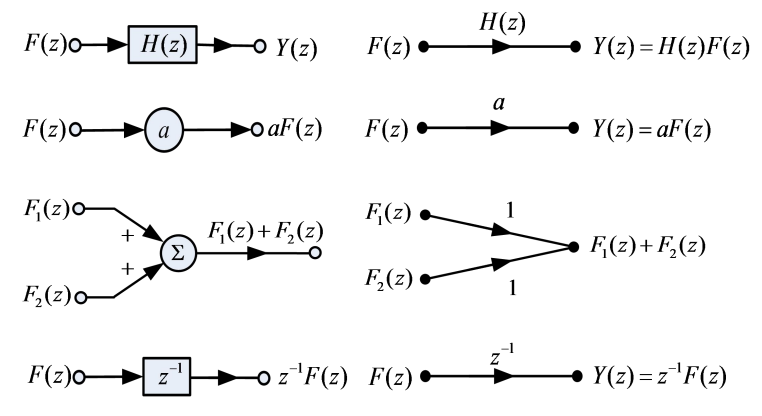
6. 1 框图与信号流图对应关系:
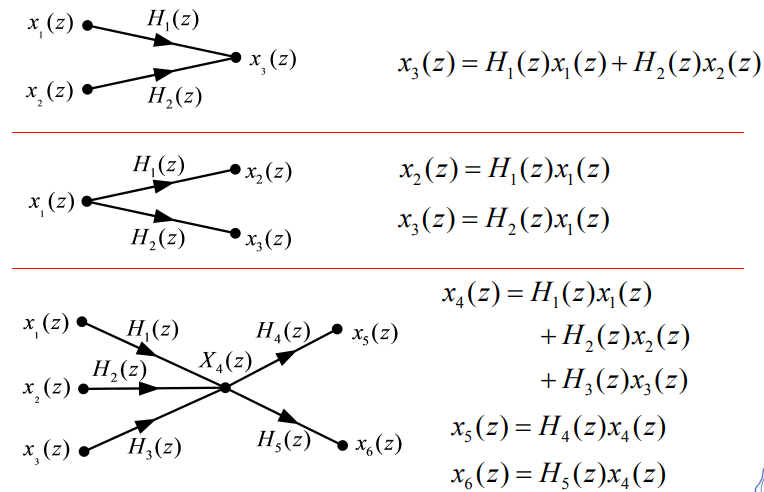
6.2 信号流图规则:
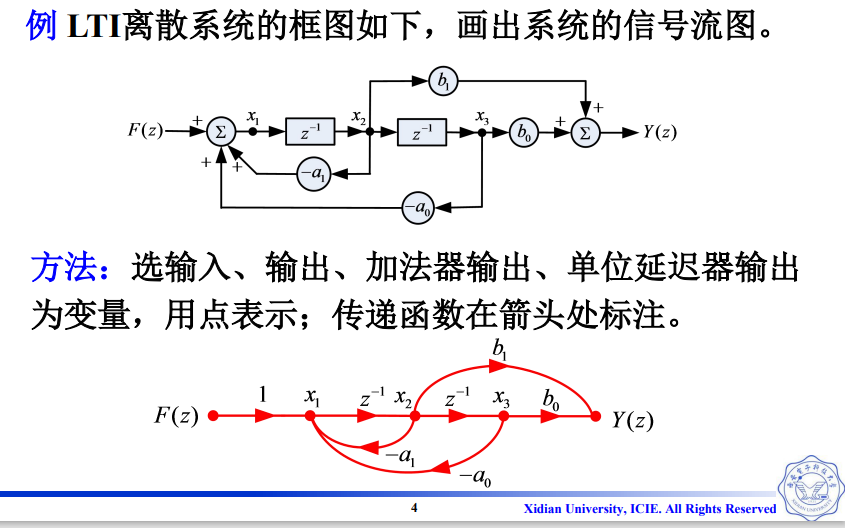
6.3 由框图到信号流图
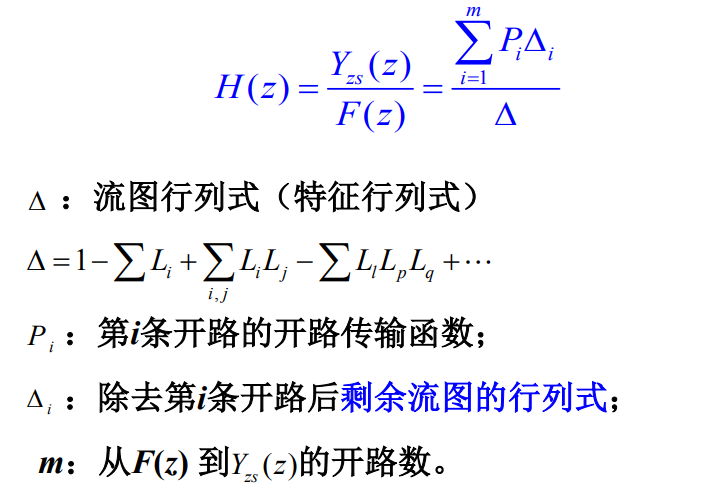
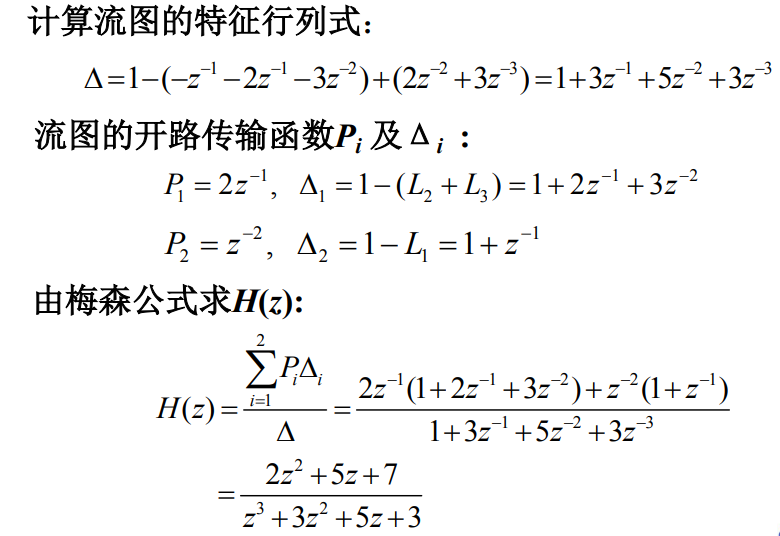
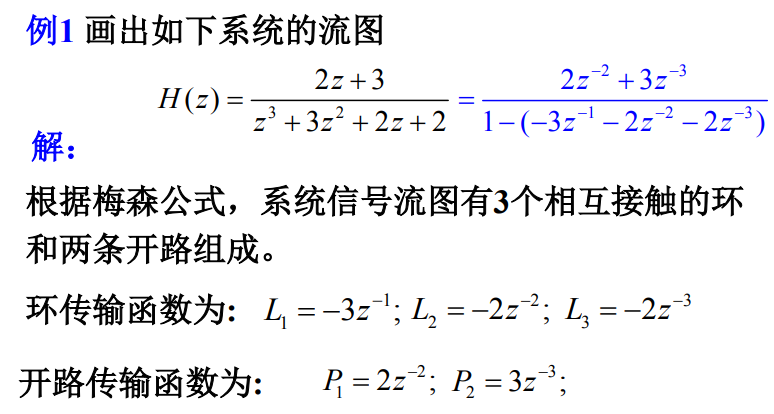
6.4 梅森公式
7 离散系统的模拟
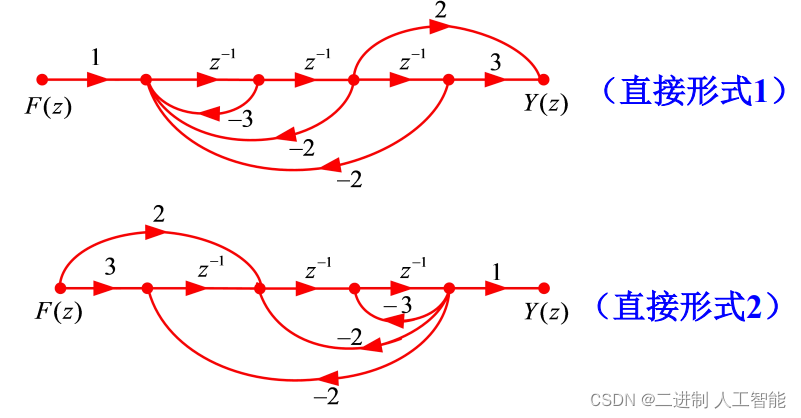
7.1 直接形式
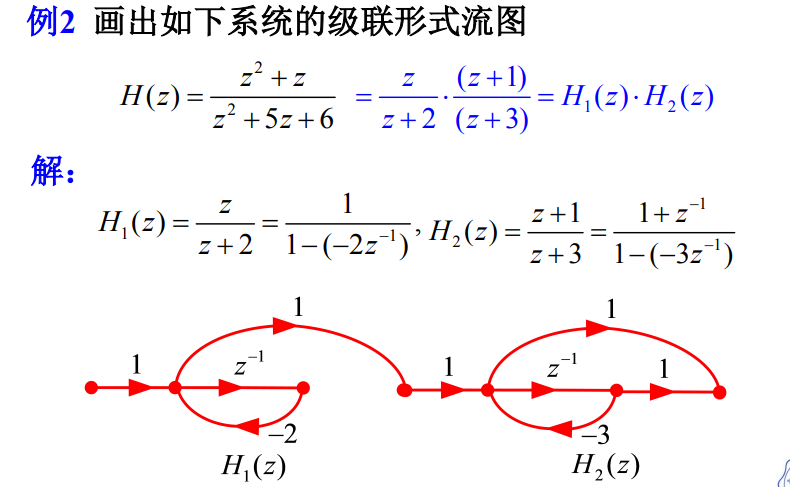
7.2 级联形式
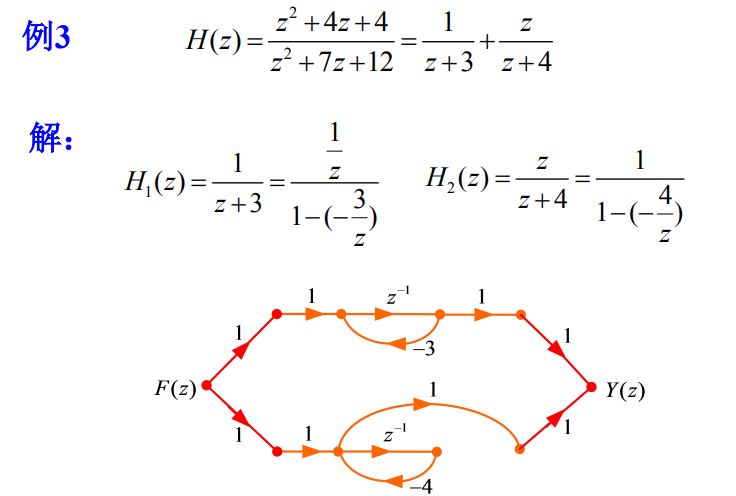
7.3 并联形式
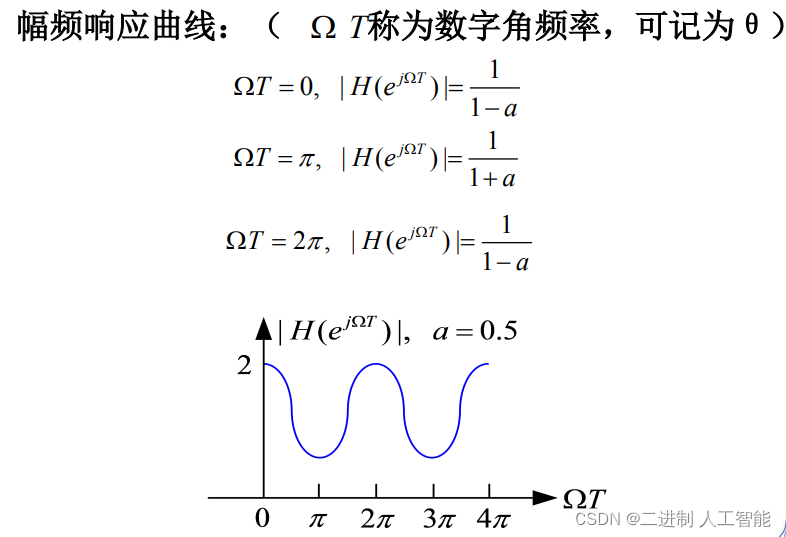
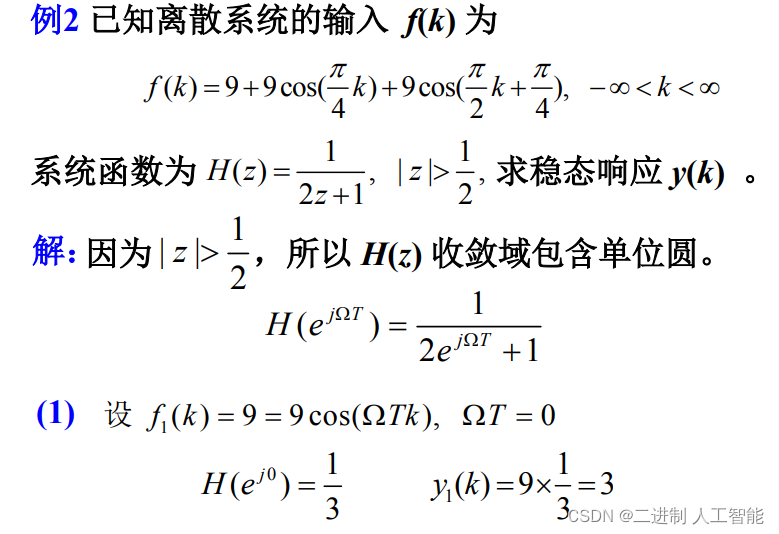
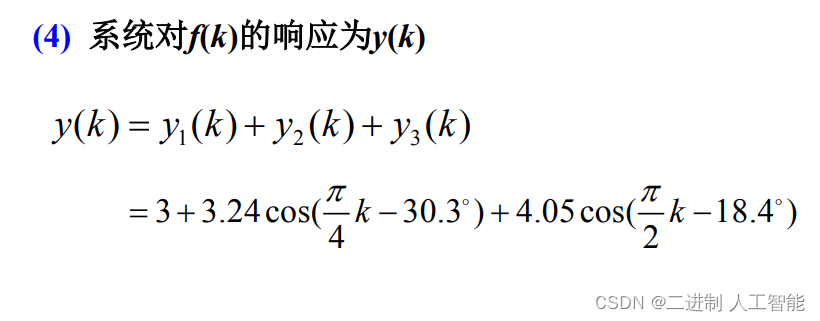
8 系统对正弦序列的响应
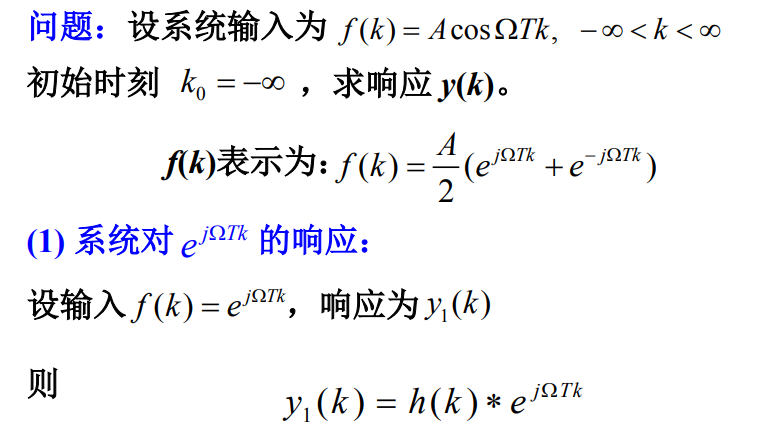

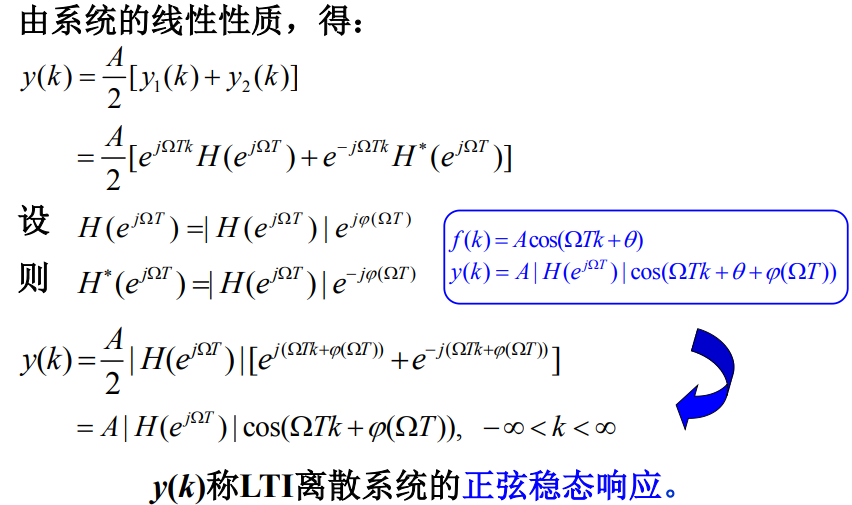
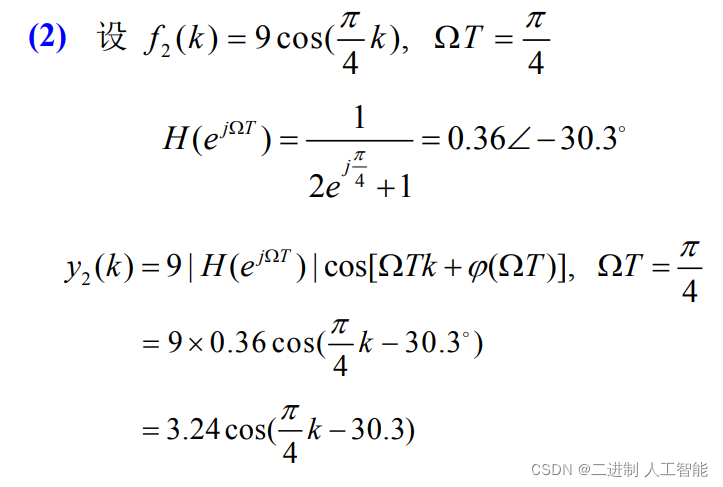
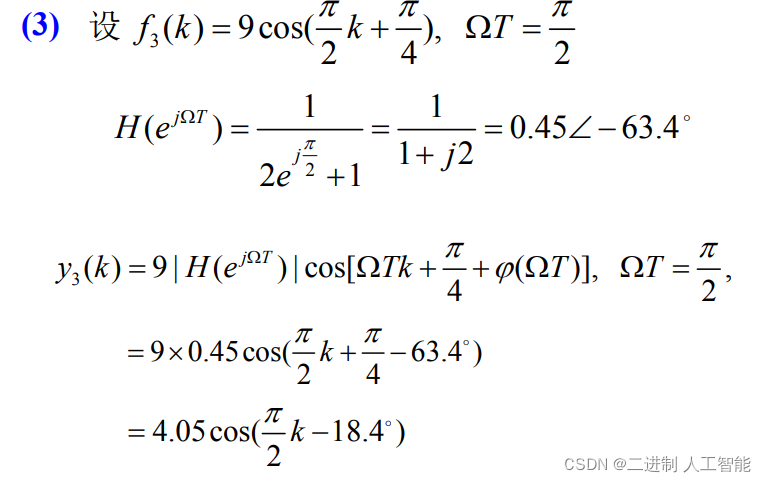
正弦稳态序列通过系统后依然是正弦稳态的,不过幅度和相位发生变化。
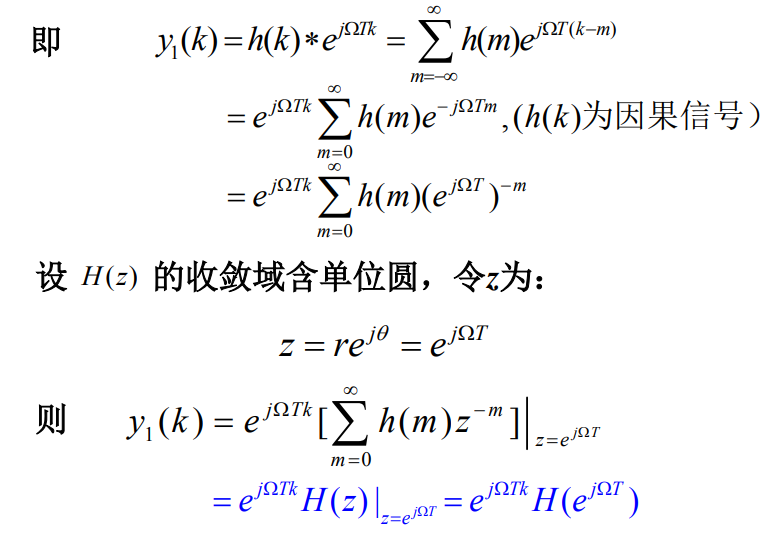
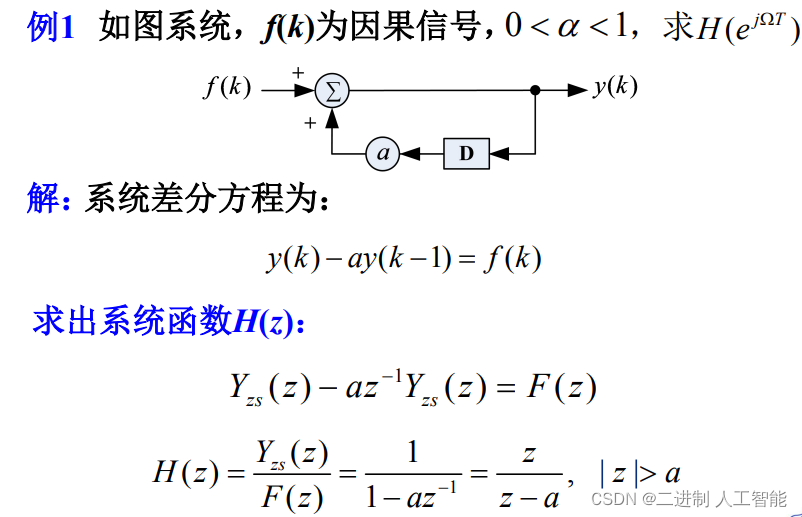
9 LTI离散系统的频率响应
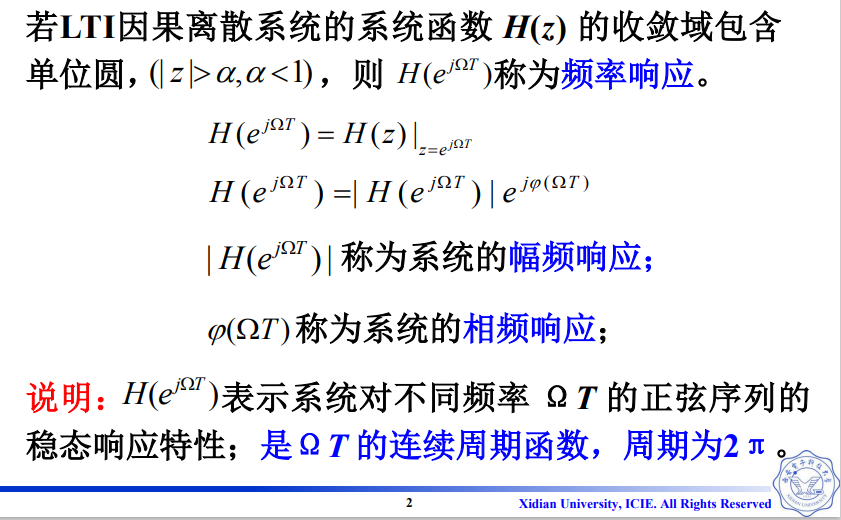
正弦稳态序列通过系统后依然是正弦稳态的,不过幅度和相位根据
H
(
e
j
Ω
T
)
H(e^{j\Omega T})
H(ejΩT)发生变化。
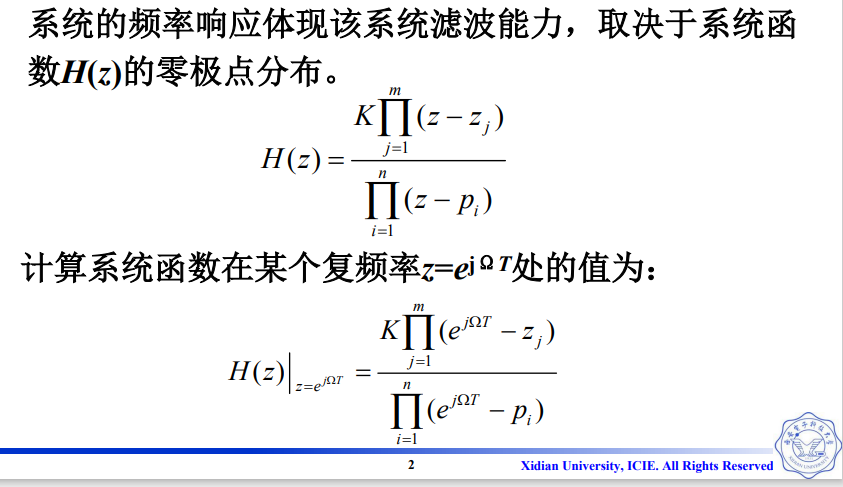
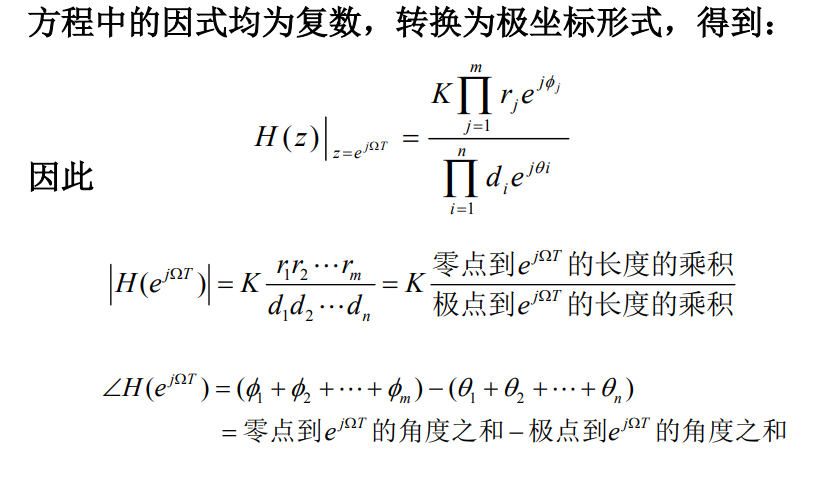
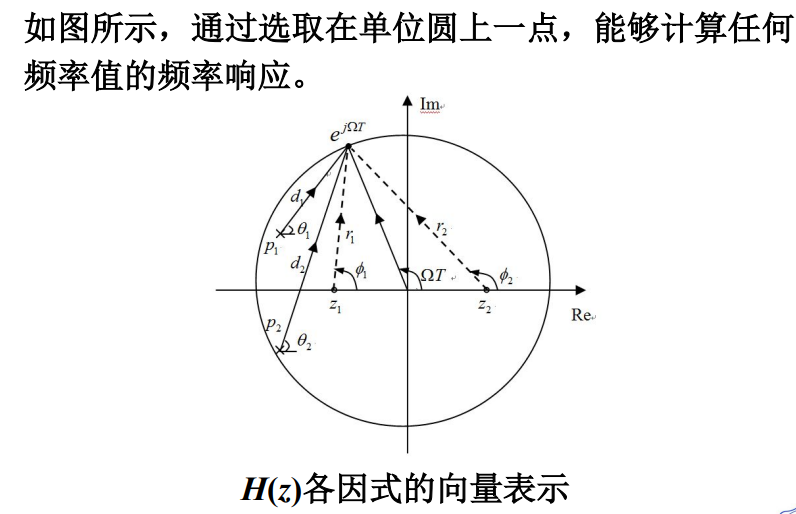
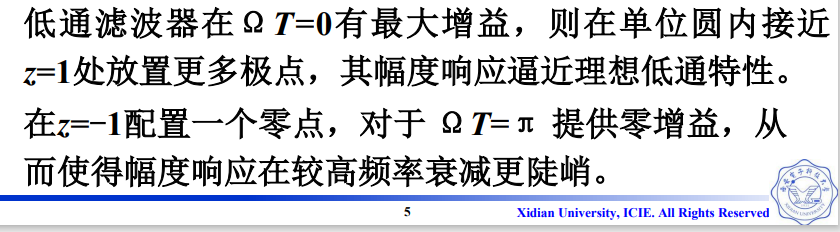
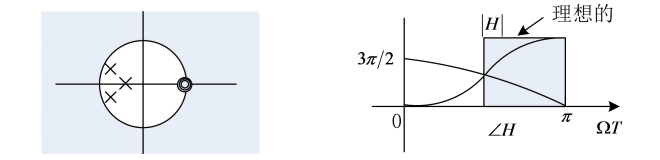
10 系统函数零极点的配置实现滤波系统
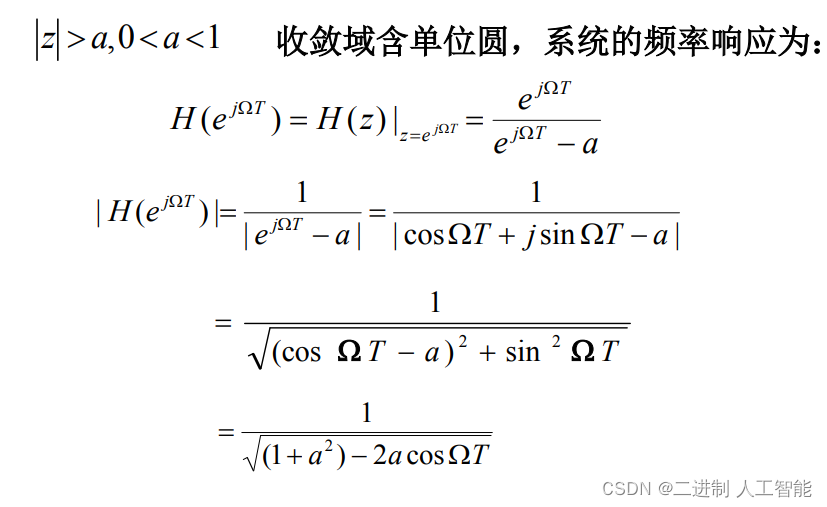
10.1 频率响应的计算

(1)低通滤波器的零极点配置

(2)高通滤波器的零极点配置

11 数字滤波器的分类
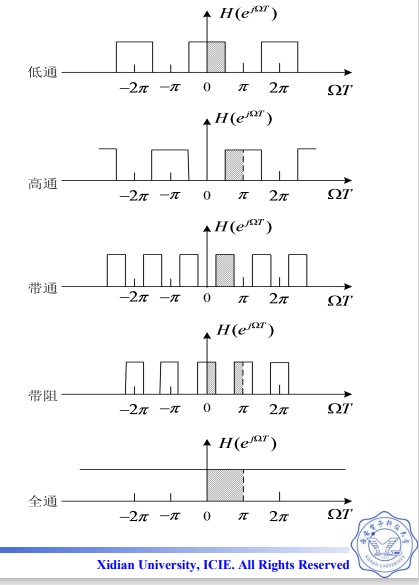
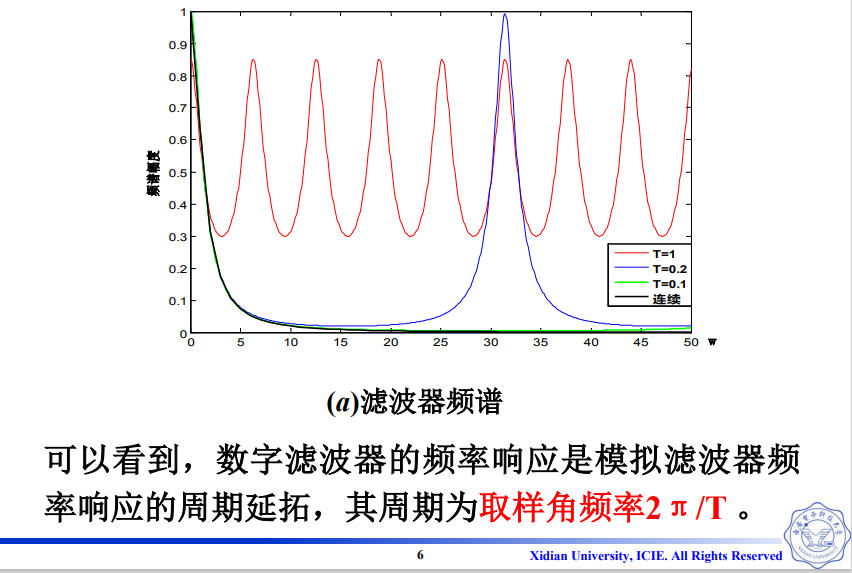
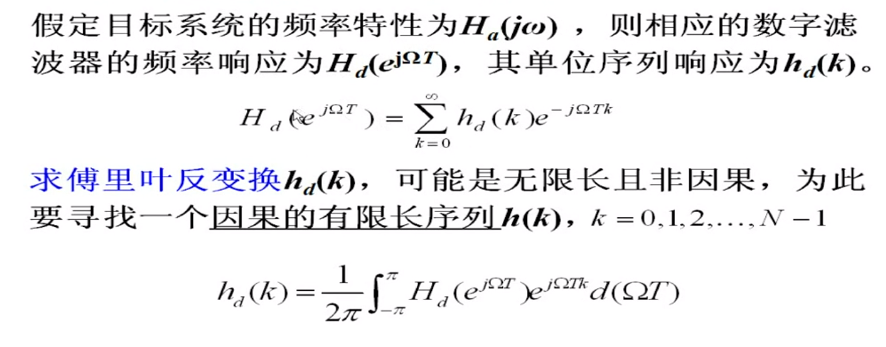
理想数字滤波器的频率特性如图所示,这些频率特性都是以 2 π 2π 2π 为周期的连续函数。
对数字滤波器频率特性只要给出 Ω T ΩT ΩT在 0 π 0~π 0 π区间内 H ( e j Ω T ) H(e^{jΩT}) H(ejΩT)的变化情况即可,即寻求系统函数 H ( z ) H(z) H(z),满足或者逼近性能要求。
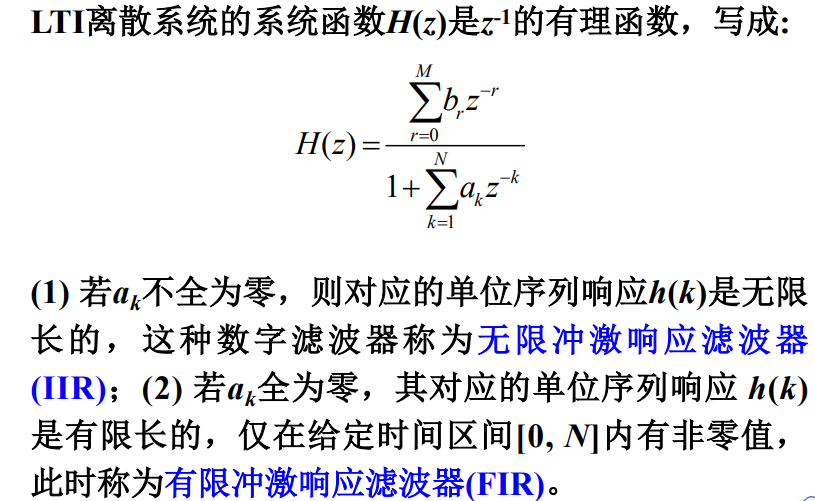
a k = 0 a_k=0 ak=0,则 H ( z ) H(z) H(z)没有分母,即没有反馈。
而有分母即有反馈情况下可以无限循环,所以叫IIR。
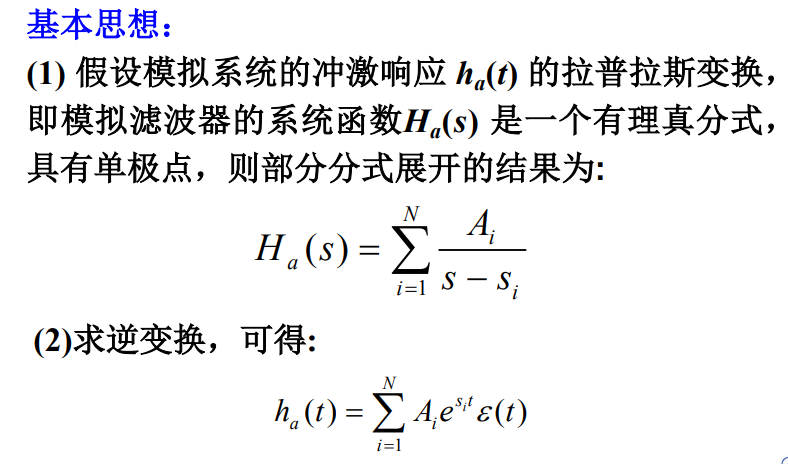
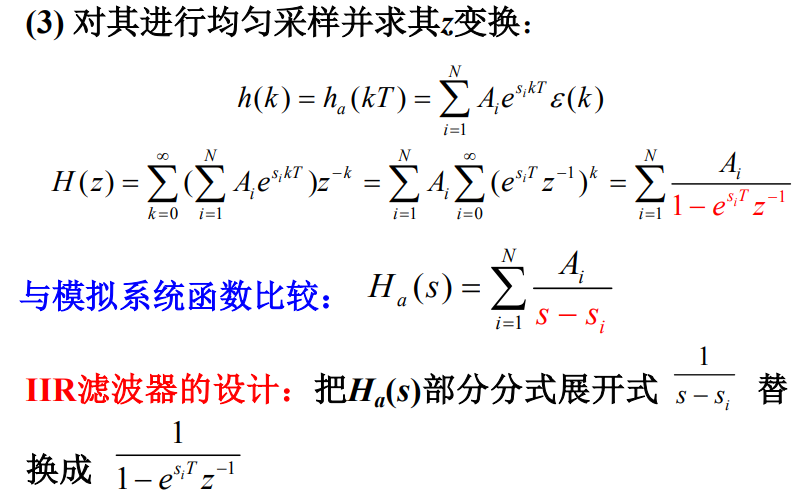
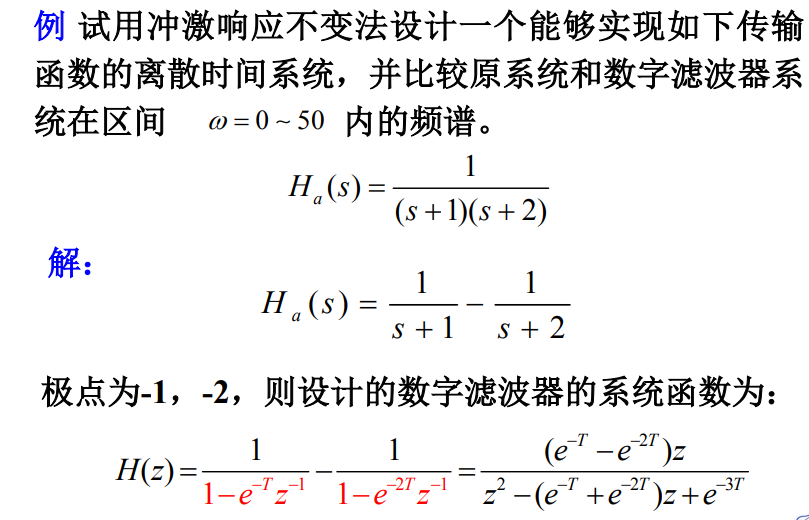
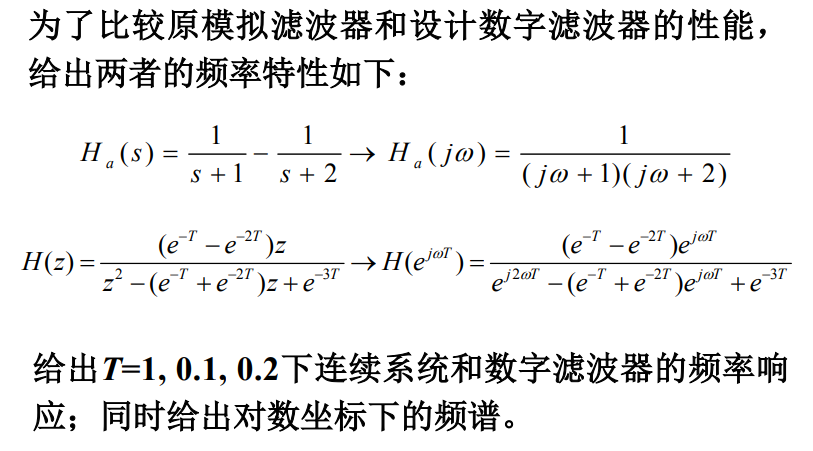
12 冲激响应不变法设计IIR滤波器
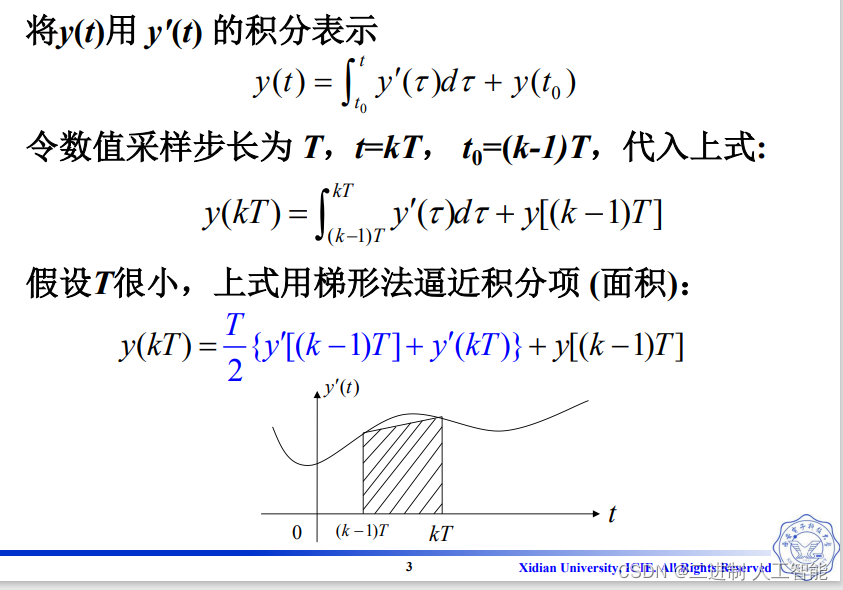
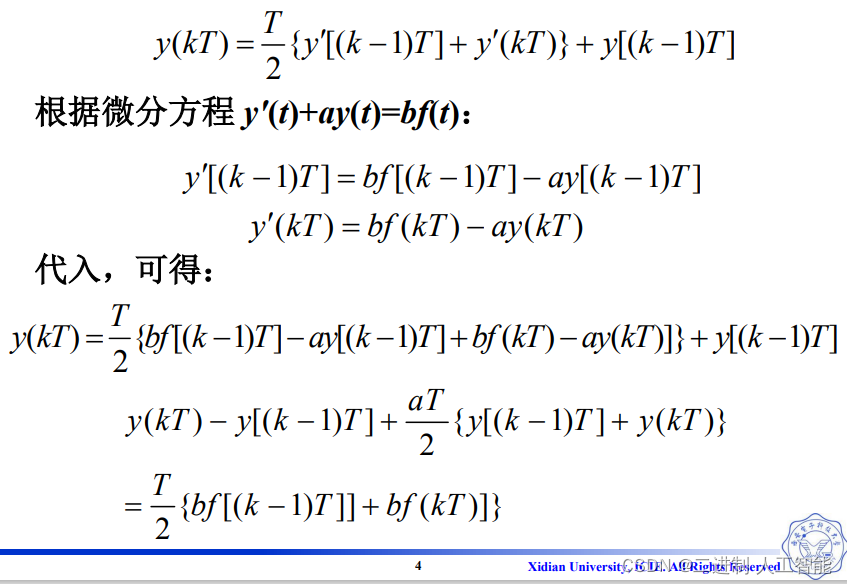
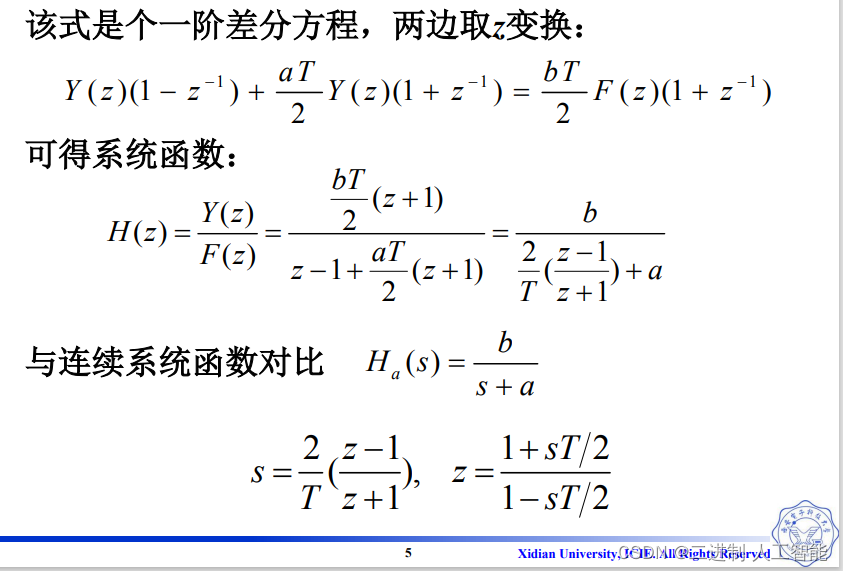
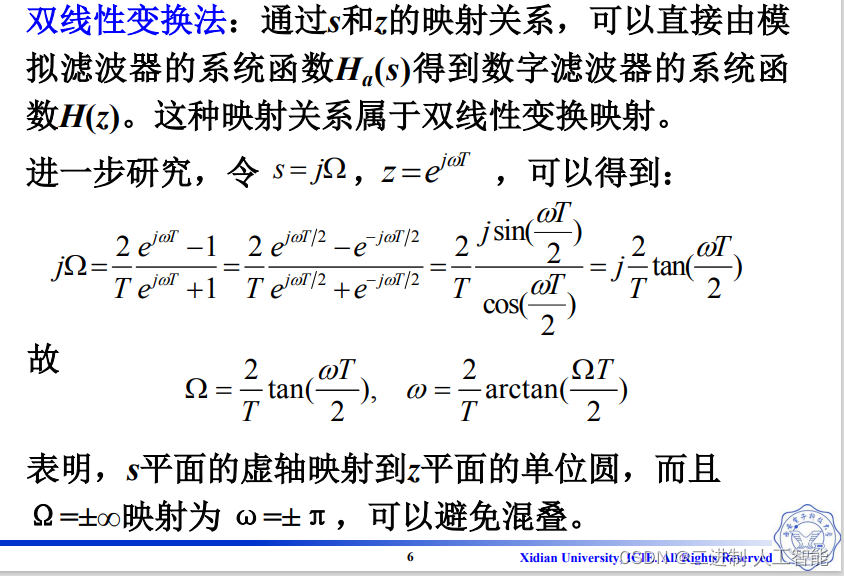
13 双线性变换法设计IIR滤波器
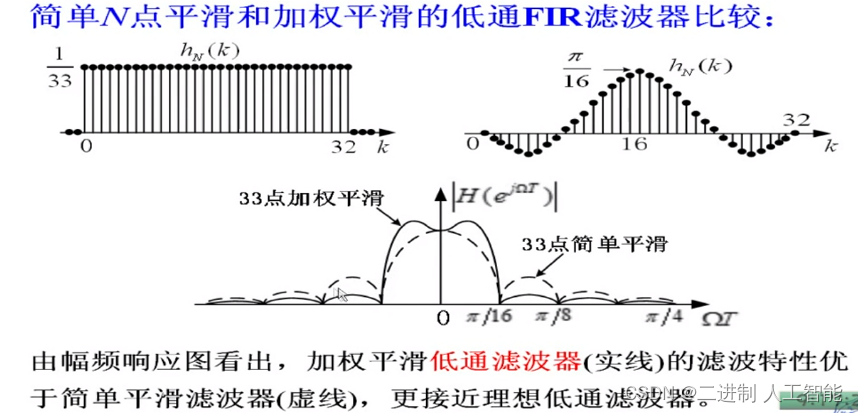
14 窗函数法实现FIR滤波器设计

中国大学MOOC:信号与系统 ,西安电子科技大学,郭宝龙,朱娟娟


















 2976
2976

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











