






一种基于贪心算法的雷达网通信资源调度策略
一、摘要
针对组网雷达探测通信一体化的需求,从适应组网雷达通信拓扑时变和时间资源动态优化角度出发,提出了一种基于贪心算法的雷达组网通信资源调度策略。该方法建立了一种基于雷达时分通信的矩阵拓扑模型,用于实现通信节点应答冲突的预判与规避,同时根据通信矩阵拓扑特征,以最大时间资源节省为目标构建了贪心策略,获得了优化的时间资源调度方案。通过仿真分析表明,文中方法可有效解决组网雷达因通信时长和节点数量动态变化引起的资源规划问题,有效降低雷达时间资源消耗。
关键词:雷达组网;探测通信一体化;资源规划;贪心算法
二、引言
随着网络中心战和体系对抗的发展,雷达探测通信一体化已成为相控阵雷达多功能多任务的重大需求,也是多平台自组织网络实时态势共享、高速率、低时延信息保障的重要解决途径,由于探测、通信各自特点,除了需解决共同工作时电磁兼容问题,还需重点解决资源调度设计,实现探测和通信用户应答的时序无冲突。现阶段主要方法包括:
-
美国AMRFC综合射频,采用收发阵面分置增加空间隔离度实现同时多功能,但没解决多数雷达需共口径探测、通信需求;探测和通信一体化波形设计,针对共口径下同时探测和通信,
-
文献[5]对国内外探通波形设计进行了总结,文[6]设计了通信过程中多站协同实现探测定位的方法。
-
文献[7-8]提出基于MIMO雷达来实现探测通信一体化的思路,但这些研究更偏向于通信兼顾探测任务,与以探测为核心的传统雷达差异较大,会带来雷达设计复杂提升或者某些能力下降[9]。探测、通信共阵面时分复用易工程实现,但需尽量减少对探测时间资源的占用,
-
文献[10-11]通过为雷达节点固定分配通信时隙实现了探测、通信一体化,但在时长和节点数量时变的通信网络拓扑中,固定通信时隙的时分复用带来时间资源浪费,当雷达兼顾通信时,如何避免通信应答冲突,同时有效实现通信时间资源的动态分配与优化,国内外尚缺少针对性研究。
针对以上问题,本文在以往时分通信基础上,提出一种基于贪心算法的雷达网络通信资源调度策略,解决了时变通信拓扑下的通信应答冲突回避和资源动态规划、优化问题,通过仿真表明,在通信拓扑变化时仍可有效改善时间资源。
三、雷达通信网模型
相控阵雷达主阵面可通过划分多个子阵面,并利用频分、时分等方式提升电磁兼容性,实现同时与多个用户完成通信任务[12]。周期性分时探测、通信时,为实现多节点无冲突通信,需要在通信任务执行前,形成资源调度策略,为各节点通信发射或接收分配时间。
假设对于不大于M节点的自组织雷达网,雷达节点阵面每个通信子阵均可通过单跳与另一节点阵面上1个通信子阵完成通信。针对当前周期T内通信任务的时间分配过程如图1,
可构建为一个M×N(假设N=M)的二维通信矩阵模型A。其中第m行第n列节点通信发射或接收时长为a mn
-
m=n时, 代表节点m正发射信号,且认为等于雷达节点各通信子阵的最大发射或接收时长;
-
m≠n时代表节点n对节点m发射信号的接收时长。
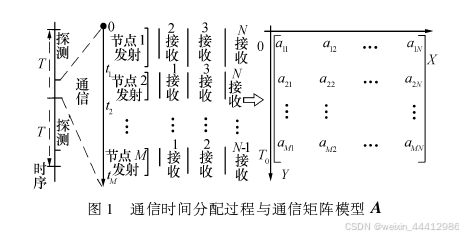
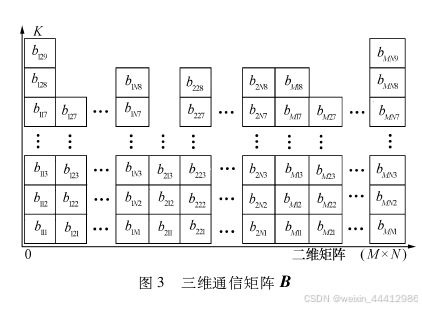
矩阵A中,以Y轴表示时间增长变化,当从时间轴上依次为m个节点划分固定时长amm,可保证各节点间无冲突通信应答。如果amm=0,表示不需要分配通信时间。本雷达周期T内的通信任务时长T0

此外,传输距离会造成通信延时,接收方还需增加保护时间Tp,避免尚未收全信号便关断接收。由于网内节点位置时变会引起各节点时延差异性,为简化分 析,可将Tp设定为最大延迟。假设雷达视距通信距离为Rmax,则Tp=Rmax/光速。则总通信任务时长修正为
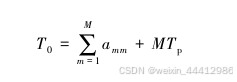
实际通信中,并不是每个节点间,每个任务周期内均需通信。如图2所示,四节点雷达网可能出现的通信拓扑,设节点1和3、1和4有通信任务, 最大时长 t1; 节点2和3、2和4有通信任务, 最大时长t2; 节点1和2无通信任务,即没有相关性,则1和2在频分复用后,可在时间上同时与3和4通信,而不需在时间轴上 划分两份时隙,此时可节省时间为min(t1,t2)。
在通信矩阵A中,对于互不发射和接收的m和n节点,可用amn=anm=0(m≠n)来表示两节点不相关。
-
在动态规划时,通过寻找不相关的多个节点来并发通信任务,即可实现无冲突通信同时,有效节省雷达时间资源。
-
当网内通信强度不大时,不相关节点会增多,矩阵A的稀疏性将提升,则存在大幅压缩通信时间的可能。
-
此外,不同节点间通信任务时长,可能因通信需求不同呈现较大差别,如果能对节点间通信时间精细划分,形成多个通信子任务,有利于某些时段形成稀疏性较高的通信矩阵。
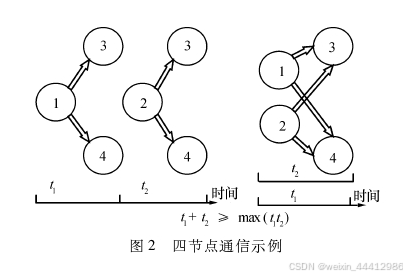
如图3所示,为提升矩阵稀疏性,可在二维矩阵A基础上再精细划分时隙,构建三维通信矩阵B。
构建时将amn按照最小通信时间片Δt进行量化,形成为kmn个时间片数组,时间片长度为kmn=amn/Δt。
b(m,n,k)为1表示有通信任务,为0表示无通信任务。纵轴为各节点通信时间片数量。横轴反映第k层矩阵的稀疏性。
假设本周期最大通信时长量化为K=max(kmn),则总通信时间可认为是K个二维矩阵通信时长相加。
M0为第一层节点数;α=TP/Δt,α向上取整。根据式(3),总通信时长也可转化为L(≤K)个二维或三维矩阵的通信时长bl相加。
切分L次后,各子任务中最大通信节点数为Ml,考虑增加每次子任务时延保护,则总通信时间资源表示为:
由图2所示寻找不相关节点,完成并发通信,各子任务实际通信时间变为cl,则优化后总时间资源:
当L=K时,优化资源带来的收益最大,但每增加一次子任务,延时保护的时间开销也将不断增加。由图3可知,三维矩阵中只在某些时段会出现稀疏性的提升,因此,通过合理划分子任务,具备实现时间资源优化和无冲突通信的可能。
四、基于贪心算法的调度策略
4.1 时间资源优化的目标函数
为实现时间资源优化,需在通信矩阵基础上建立相关因素组合的目标函数,通过设定策略合理选择参数,实现时间最省。根据式(4)和式(6)可知,优化的目标是使节省的 通信时间ΔT=T0-T2达到最大。

假设第l次任务划分的时间片为Nl,合并后减少的非相关节点数为Vl,并形成矩阵D,矩阵中节点为dlv,对应时间片为klv(≤Nl),则
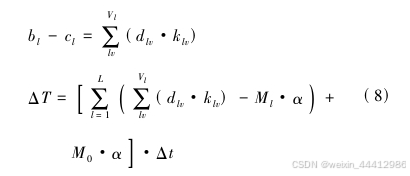
其中,子任务优化时间
根据式(8)可知,在一次确定通信任务中,L减小,时延保护开销会下降,但子任务时间片Nl会增大,可能会错过矩阵稀疏性较好的时段,即非相关节点Vl会减少,优化效果变差;反之,又会由于时延保护开销增加影响优化效果。但在所有子任务划分可能中,总有一种划分使ΔT最大。
4.2 贪心策略构建
通过选择不同划分方法求取最优解问题,是较为典型的NP难问题,通常思路是用启发式算法进行遍历,但在需要实时构建上述通信矩阵以完成冲突预测与规避的环境中,多参数选择会带来庞大的计算量,使工程应用存在困难。
贪心算法也是一种为选择性问题求最优解的方法,相比启发式算法,具有快速、高效特点。其特征是求解问题时,不从整体最优考虑,而是制定贪婪策略将整体问题分解成多个子问题,并在每次迭代过程中搜索子问题的局部最优解,最终逼近整体最优解。贪心算法不适用于所有问题,但对许多特殊问题仍能产生整体最优解。而贪心策略选取是贪心算法求最优解的关键。
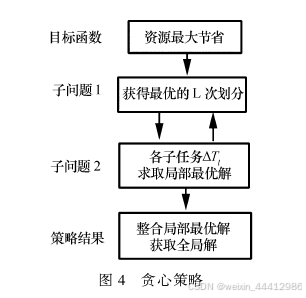
文中基于通信矩阵拓扑特征,并以式(8)为目标函数来构建贪心策略,通过L次子任务划分和通信子任务内ΔTl优化两个层次,设计条件约束,搜索局部最优解,完成最终设计,如图4所示。
4.2.1 L划分
首先各节点按照通信发射时间长短从大到小排序,便于子问题2中优化ΔTl。
根据图3的三维矩阵模型,只在切分位置出现新的不相关节点时,增加一次划分才有可能节省时间。
因此子任务划分位置应在新的不相关节点出现处,此外针对第l次任务时ΔTl,应大于0,才能保证ΔT单调增长。具体流程如下:
-
查找三维通信矩阵中不相关节点增加的位置l。
-
对三维矩阵B从上向下切分,每次下降步长Nl对应在l的位置,根据后续步骤计算优化的ΔTl,如果大于0,记录此次划分位置l;否则不切分子任务。
-
完成后续切分,直到L≥K。
4.2.2 ΔTl优化
基于通信模型分析,节点间合并实现并发通信,需考虑以下特征:
-
多个节点不相关,
-
必须多个节点间两两不相关;
-
不相关的节点只能合并一次;
-
合并后节点分配的时长是多个不相关节点中的最大通信时长;
为保证通信时间最小,多个存在公共不相关节点的群中,具有最大时长节点的群优先合并,以避免该群中节点成为其他群中最大时长。该问题与“背包问题”[ 13] 较为类似,可以通过设定贪婪策略获得最优解。 通信时长从大到小排序结果,后续流程具体如下:
-
在第l次子任务中,从第1点开始,根据不相关判定条件a1 n =an 1 =0(n>1)依次遍历寻找所有不相关节点,按节点顺序形成初始节点群。
-
以初始节点群内第2个点开始,依次与群内后续点进行不相关判定,如均相关,则第2点与第1点并发通信,并标记该节点已被合并,并删除群内其他节点,认为未被合并;如存在不相关节点,则以新的不相关节点继续与群内剩余节点进行不相关性判定,直到群内剩余节点两两不相关,则该群内所有节点可并发通信,其他不满足规则节点删除,认为未被合并。初始群变为不相关群。
-
选取下一未被合并的节点m,根据不相关判定条件am n =an m =0(n>m)依次遍历获取所有不相关节点,形成初始群m,重复步骤(2)完成不相关判断,形成新的不相关群。
-
重复步骤(3)完成节点遍历,形成所有不相关群,即可获得子任务最优的ΔTl和优化后的通信矩阵。
策略结果:根据可切分位置l,得到雷达各通信子任务时长;在子任务中为不相关节点群依次分配通信时间,即完成时间资源规划。利用各子任务局部最优解获得的总全局优化时间为

五、仿真与分析
5.1 对通信时间资源的改善性能
以8节点的雷达通信网络为例,设定时延保护时间Tp为150μs,最小时间片Δt为250μs。一个工作周期T内单雷达通信时间片最大值K=10,各节点通信实际时长按照0~10间整数进行伪随机生成,并按照从大到小排序形成通信矩阵。 单次通信矩阵时间片示例如下。
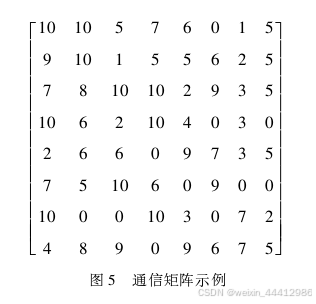
图5通信矩阵示例通过文中贪心策略构建的贪心算法,计算该通信矩阵资源优化比例结果为ΔT/T0=26.3%。
为进一步分析对网内不同强度通信任务的优化结分别设定K值在8~10、5~10、0~10间均匀分布,各进行1 000次的蒙特卡洛仿真。仿真结果如图6所示。
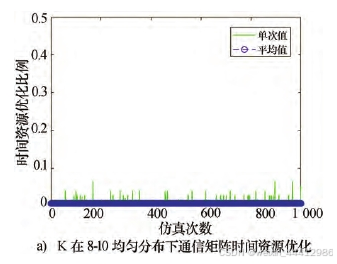
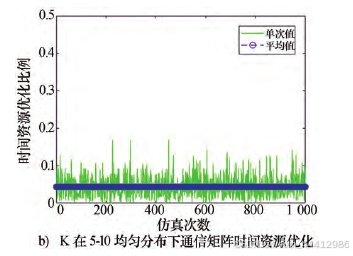
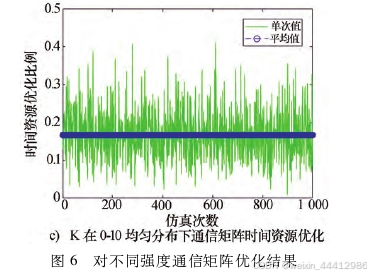
由图6所示,对3种不同通信强度的任务,随机时变通信拓扑的时间资源优化比例结果平均值分为0.5%,4.5%,16.8%,部分通信拓扑的改善结果可达40%。
说明当通信任务强度大时,基于贪心策略构建的资源调度方法相比固定分配通信时隙方法带来的得益不大;当通信强度下降后,改善越来越明显,可有效优化雷达时间资源,与理论分析一致。
5.2 变节点和变时长通信拓扑下的适应性
按照雷达网工作周期T=200 ms,通信总时间不超过10%, Tp=150μs, Δt=250μs。雷达网内节点M按照3至15变化, 各节点通信时长服从0~K伪随机分布,其中K=10%·T/Δt/M。通过1000次蒙特卡洛仿真,统计优化的均值,分析文中贪心策略在变节点和变时长通信拓扑下对时间资源优化性能。

由图7可知,在节点少时,贪心策略改善较小,主要是因为节点少会使并发通信的可能性下降;当节点增加到5以上后,优化结果逐步收敛。因此,在通信拓扑动态变化时,文中设计贪心策略仍可很好得实现时间资源优化。
六、结论
-
随着相控阵雷达多功能多任务需求不断增加,时间资源已成为主要瓶颈,通信作为关键任务之一,必须关注时间资源的有效利用,文中提出了基于贪心算法的雷达网通信资源调度策略。
-
可有效解决网内雷达时分通信在拓扑动态变化时的无冲突通信,以及资源调度优化问题,其良好性进行了仿真证明。
-
文中重点基于可单跳完成通信进行了分析,随着分布式杀伤、有人无人协同作战等新兴战术战法应用,协同探测节点将呈现爆炸式增长,基于多跳和多雷达网组网下的通信时间资源优化问题,将是后续需重点研究的方向。

















 1243
1243

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









