







1. 纹理映射
L d = k d ∗ ( I / r 2 ) ∗ ( n ⋅ l ) L_d = k_d * (I/r^2) * (\bold{n} \cdot \bold{l}) Ld=kd∗(I/r2)∗(n⋅l)
在着色过程中,很多时候需要定义某个物体上的各个点的漫反射系数 k d k_d kd ,即对应的颜色。
- 指定顶点处的值(找到三角形的点对应在纹理上的点)
- 通过三角形获得平滑变化的值
2. 重心坐标

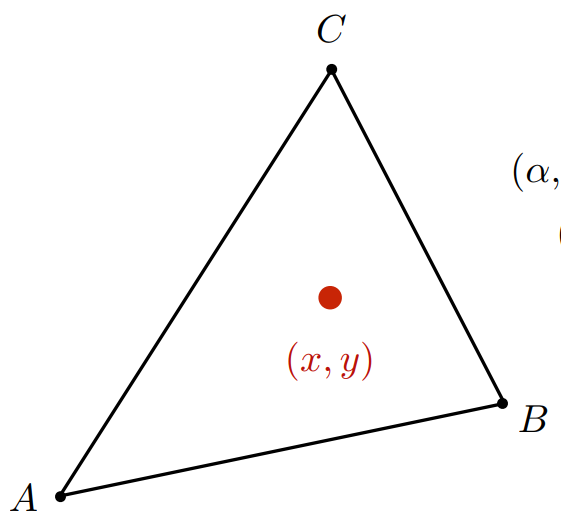
三角形的坐标系 ( α , β , γ ) (\alpha,\beta,\gamma) (α,β,γ)
三角形平面上任意一点的坐标 ( x , y ) (x,y) (x,y) 都可以用三个顶点的坐标的线性组合表示。
( x , y ) = α A + β B + γ C α + β + γ = 1 \begin{aligned} (x,y) = &\alpha A + \beta B + \gamma C \\ &\alpha + \beta + \gamma = 1 \end{aligned} (x,y)=αA+βB+γCα+β+γ=1
NOTE :如果所有三个坐标都不为负,则该点在三角形内。
2.1 几何视点 - 比例区域
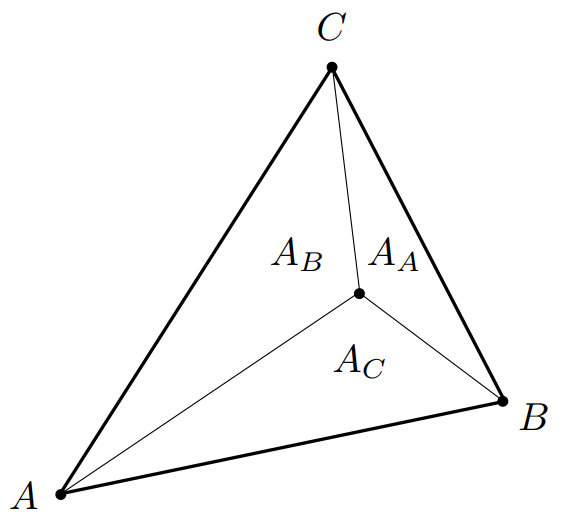
α = A A A A + A B + A C β = A B A A + A B + A C γ = A C A A + A B + A C \begin{aligned} \alpha = \cfrac{A_A}{A_A + A_B + A_C} \\ \beta = \cfrac{A_B}{A_A + A_B + A_C} \\ \gamma = \cfrac{A_C}{A_A + A_B + A_C} \end{aligned} α=AA+AB+ACAAβ=AA+AB+ACABγ=AA+AB+ACAC
2.2 三角形自己的重心
( α , β , γ ) = ( 1 3 , 1 3 , 1 3 ) ( x , y ) = 1 3 A + 1 3 B + 1 3 C \begin{aligned} (\alpha,\beta,\gamma) &= (\cfrac{1}{3},\cfrac{1}{3},\cfrac{1}{3}) \\[2ex] (x,y) &= \cfrac{1}{3} A + \cfrac{1}{3} B + \cfrac{1}{3} C \end{aligned} (α,β,γ)(x,y)=(31,31,31)=31A+31B+31C
2.3 重心坐标计算公式
α = − ( x − x B ) ( y C − y B ) + ( y − y B ) ( x C − x B ) − ( x A − x B ) ( y C − y B ) + ( y A − y B ) ( x C − x B ) β = − ( x − x C ) ( y A − y C ) + ( y − y C ) ( x A − x C ) − ( x B − x C ) ( y A − y C ) + ( y B − y C ) ( x A − x C ) γ = 1 − α − β \begin{aligned} \alpha &= \cfrac{-(x - x_B)(y_C - y_B) + (y - y_B)(x_C - x_B)} {-(x_A - x_B)(y_C - y_B) + (y_A - y_B)(x_C - x_B)} \\[2ex] \beta &= \cfrac{-(x - x_C)(y_A - y_C) + (y - y_C)(x_A - x_C)} {-(x_B - x_C)(y_A - y_C) + (y_B - y_C)(x_A - x_C)} \\[2ex] \gamma &= 1 - \alpha - \beta \end{aligned} αβγ=−(xA−xB)(yC−yB)+(yA−yB)(xC−xB)−(x−xB)(yC−yB)+(y−yB)(xC−xB)=−(xB−xC)(yA−yC)+(yB−yC)(xA−xC)−(x−xC)(yA−yC)+(y−yC)(xA−xC)=1−α−β
可以使用重心坐标对三角形进行在顶点上的线性插值
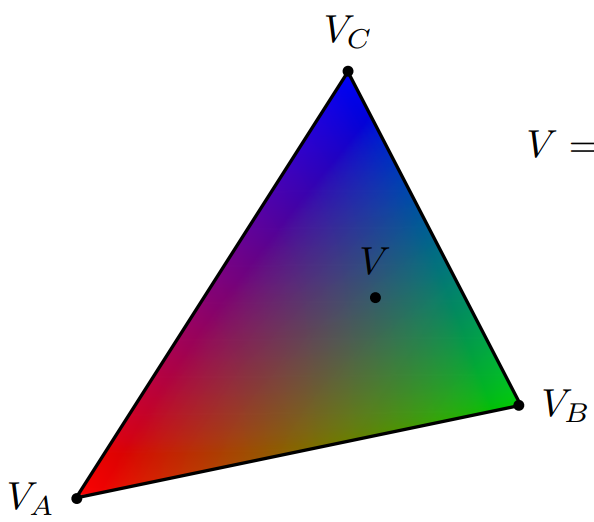
V = α V A + β V B + γ V C V = \alpha V_A + \beta V_B + \gamma V_C V=αVA+βVB+γVC
其中属性 V A V_A VA , V B V_B VB , V C V_C VC 可以是位置,纹理坐标,颜色(图中所示),法线,深度,材质属性…
for each 光栅化屏幕样本 (x,y): \\ 通常是一个像素的中心
(u,v) = 在 (x,y) 处评估纹理坐标
texColor = texture.sample(u,v); \\ 使用重心坐标
sample's color = texColor; \\ 通常是漫反射的反射率Kd(回想一下Blinn-Phong反射率模型)
3. 纹理过小
当纹理图片过小时,应用后会因为纹理分辨率不足导致图片失真。
纹理元素、纹素(texel) :纹理上的像素。
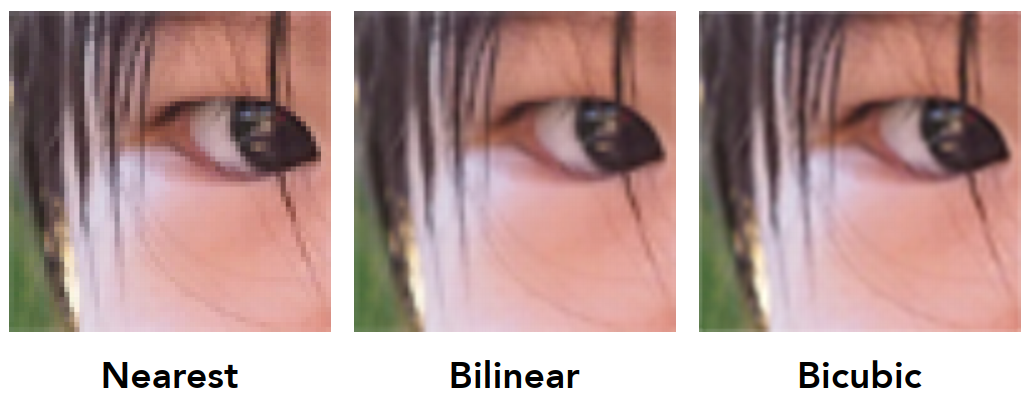
3.1 双线性插值(Bilinear Interpolation)
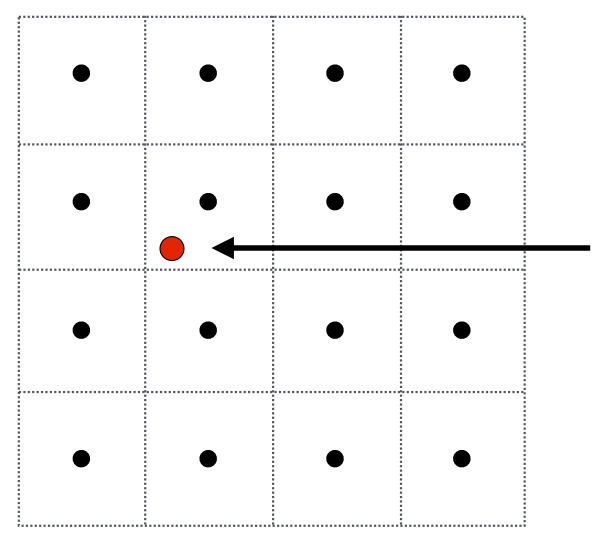
- 某个像素映射在非整数的位置,即图中红点,需要在红点处采样纹理值 f ( x , y ) f(x,y) f(x,y)
- 图中黑点表示纹理采样位置
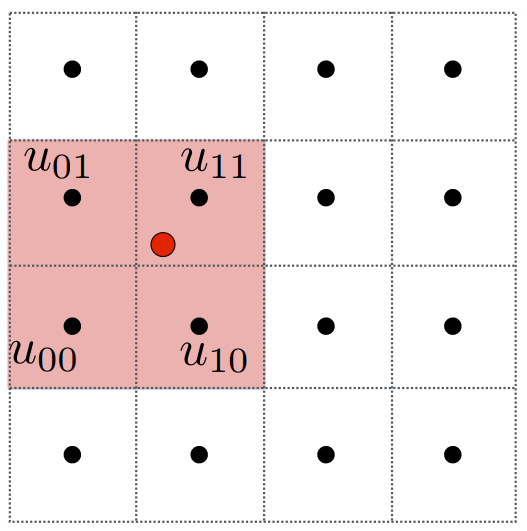
- 取4个最近的样本位置,并贴上纹理值。
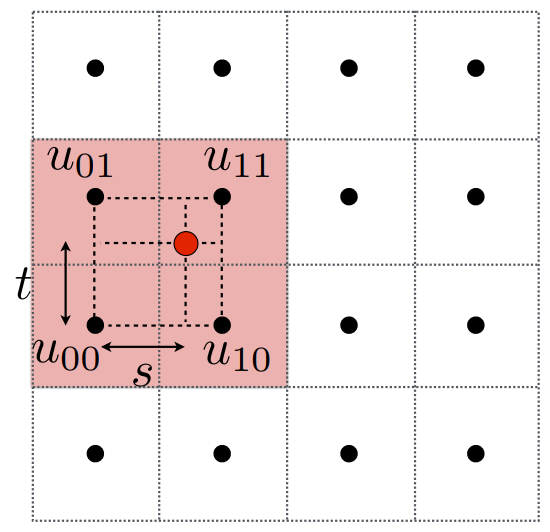
- 分数偏移量 ( s , t ) (s,t) (s,t) 如图所示,竖向为 t t t ,横向为 s s s ,均为 0 到 1 之间,两个 texel 之间间距为 1。
线性插值函数(1D)
l e r p ( x , v 0 , v 1 ) = v 0 + x ( v 1 − v 0 ) lerp(x,v_0,v_1) = v_0 + x(v_1 - v_0) lerp(x,v0,v1)=v0+x(v1−v0)
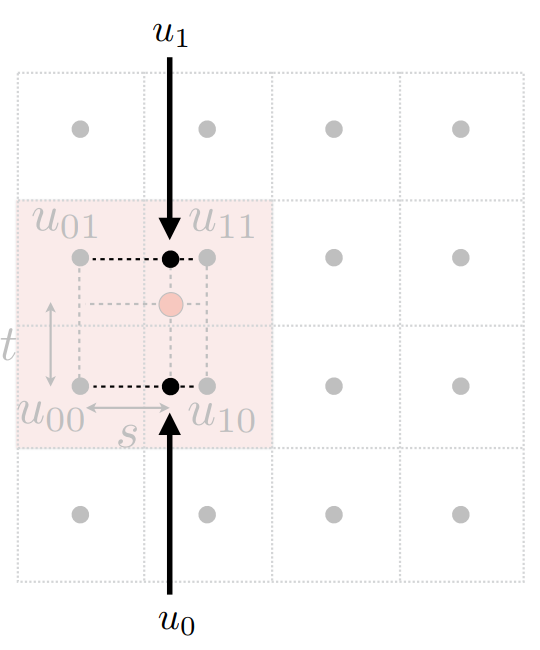
使用两个辅助点进行插值(水平):
u 0 = l e r p ( s , u 00 , u 10 ) u 1 = l e r p ( s , u 01 , u 11 ) \begin{aligned} &u_0 = lerp(s,u_{00},u_{10}) \\ &u_1 = lerp(s,u_{01},u_{11}) \end{aligned} u0=lerp(s,u00,u10)u1=lerp(s,u01,u11)
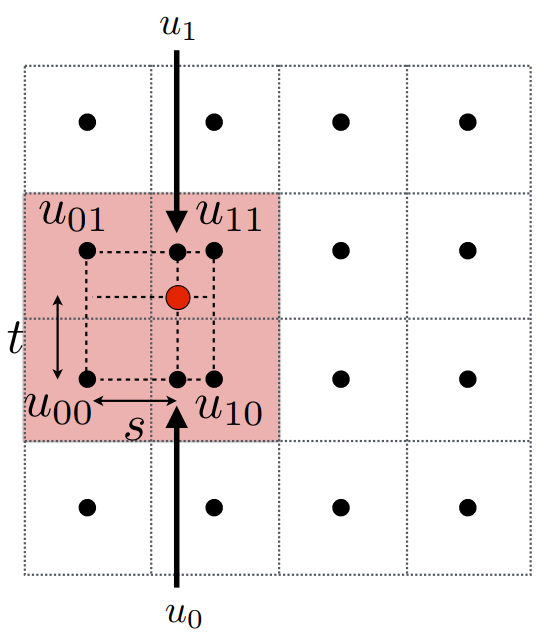
最后再进行竖向插值,获得最终红点处的颜色结果:
f ( x , y ) = l e r p ( t , u 0 , u 1 ) f(x,y) = lerp(t,u_0,u_1) f(x,y)=lerp(t,u0,u1)
NOTE :此时红点处的结果综合考虑了周围4个点的颜色。
3.2 双三次插值算法(bicubic interpolation)
参考文章:
- 双三次插值算法(bicubic interpolation)与图形学和计算方法的关系:
https://blog.csdn.net/nandina179/article/details/85330552
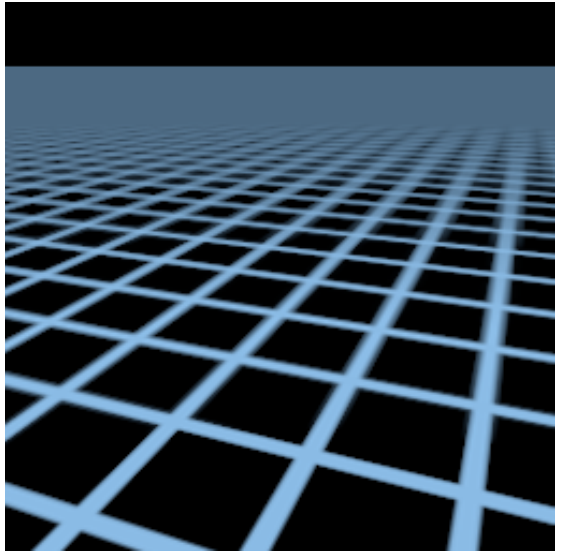
4. 纹理过大
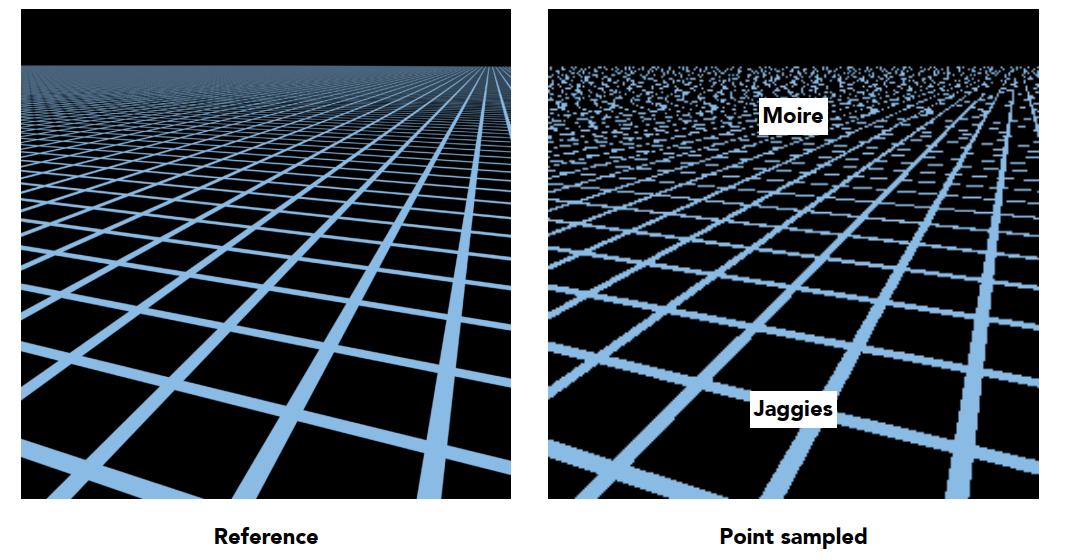
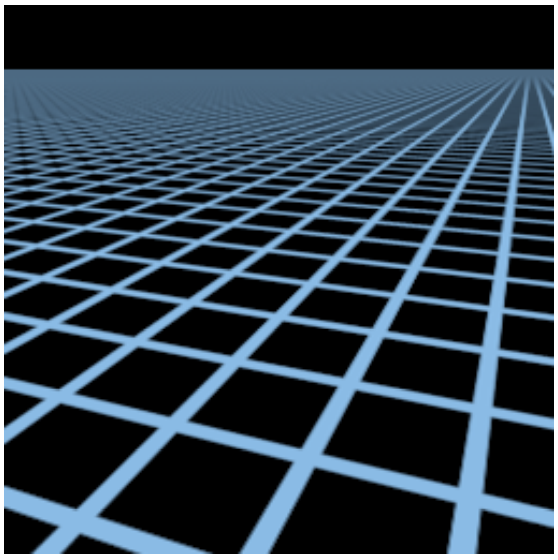
远处产生摩尔纹,近处产生锯齿。
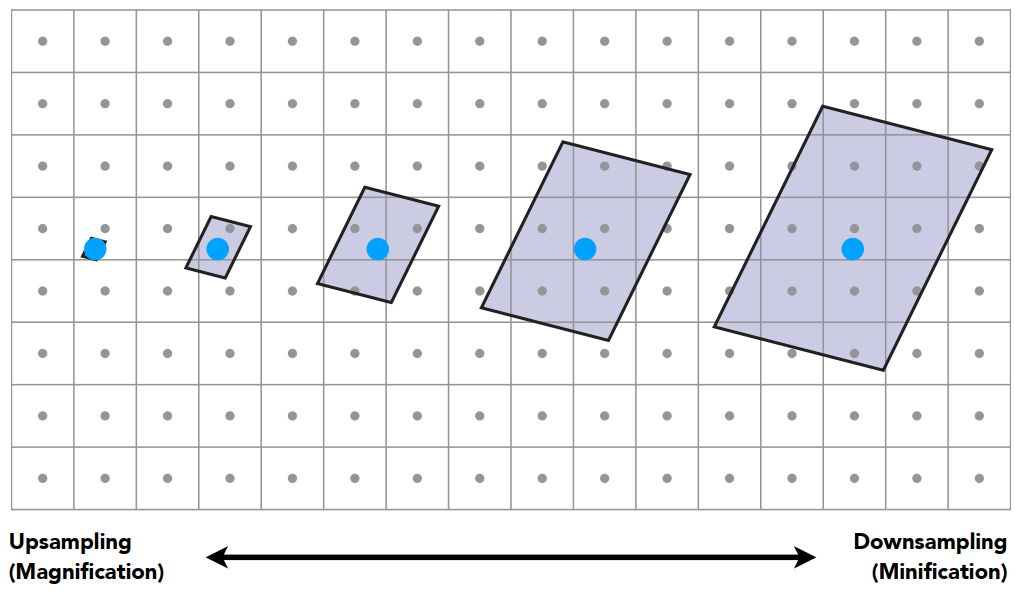
- 近处(左侧)单个像素覆盖的纹理区域相对较小。
- 远处(右侧)单个像素覆盖的纹理区域相对较大,此时单个像素取区域内的所有纹理颜色的平均值。
单个像素内信号频率较高,此时仅用一个像素点进行采样,必然锯齿化。
4.1 点查询问题 vs 范围查询问题
Point Query vs. (Avg.) Range Query
点查询 :采样以点为单位,计算单个点对应的值的大小。
范围查询 :以范围为单位,直接计算该区域内部的平均值(有些范围查询也可能是计算最大值和最小值)。
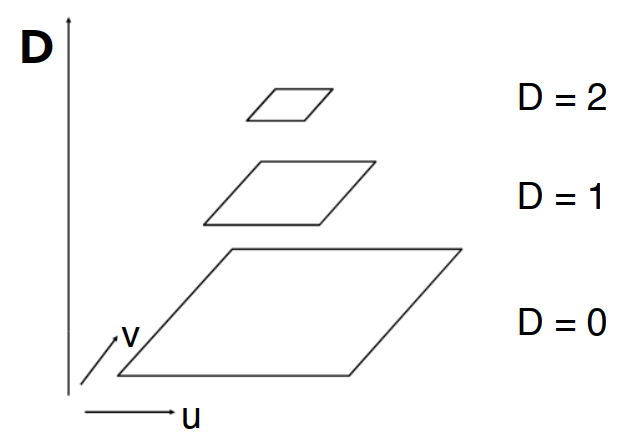
4.2 Mipmap
Mipmap 允许(快速的、近似的、正方形区域的)范围查询。
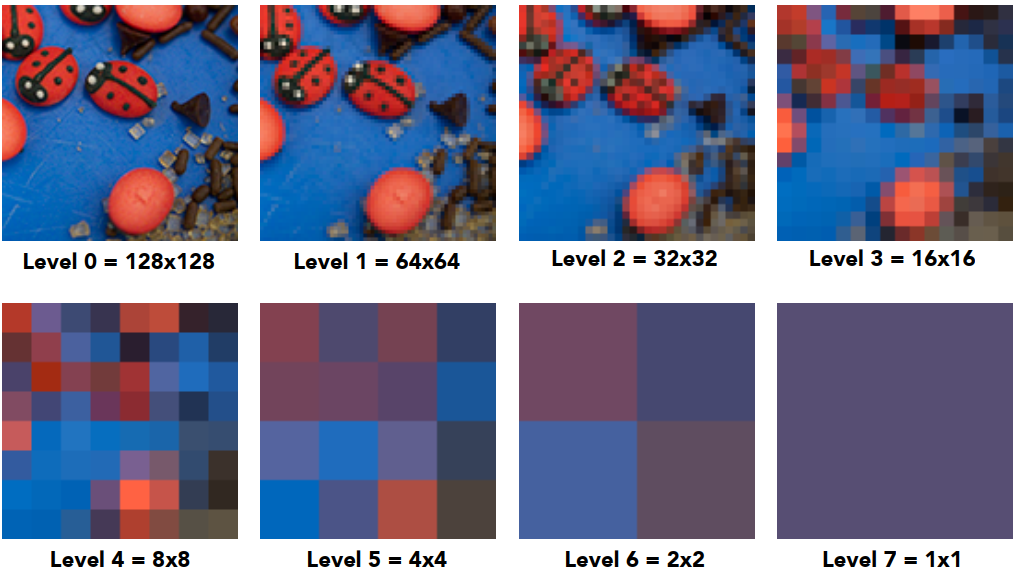
图中每层的分辨率依次缩小一半,存储量为原图的 4 3 \cfrac{4}{3} 34 。
图像金字塔 :
计算 Mipmap 层级 D
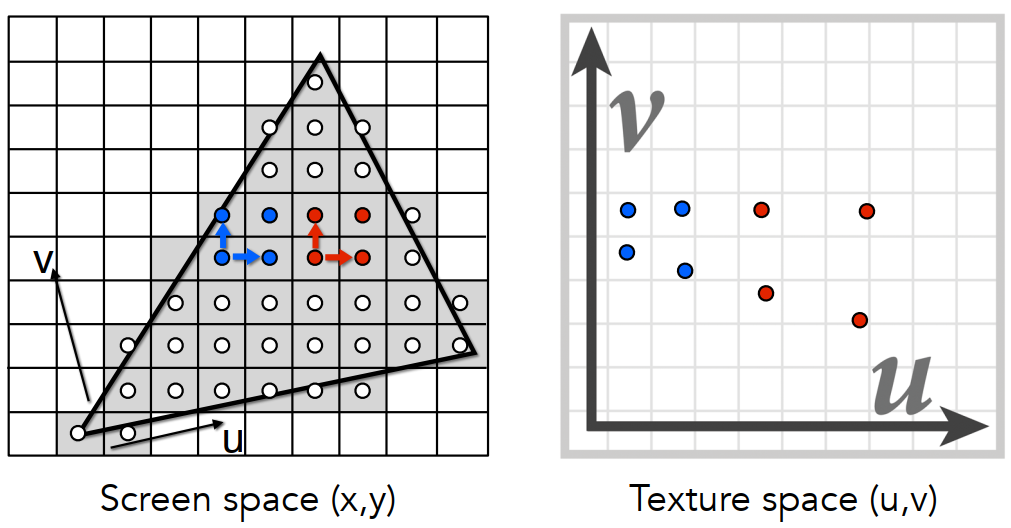
使用相邻屏幕样本的纹理坐标估计纹理足迹。
例如:此时想计算图中红点的覆盖范围。
先计算自己的中心和相邻点的中心,分别投影到纹理图上。
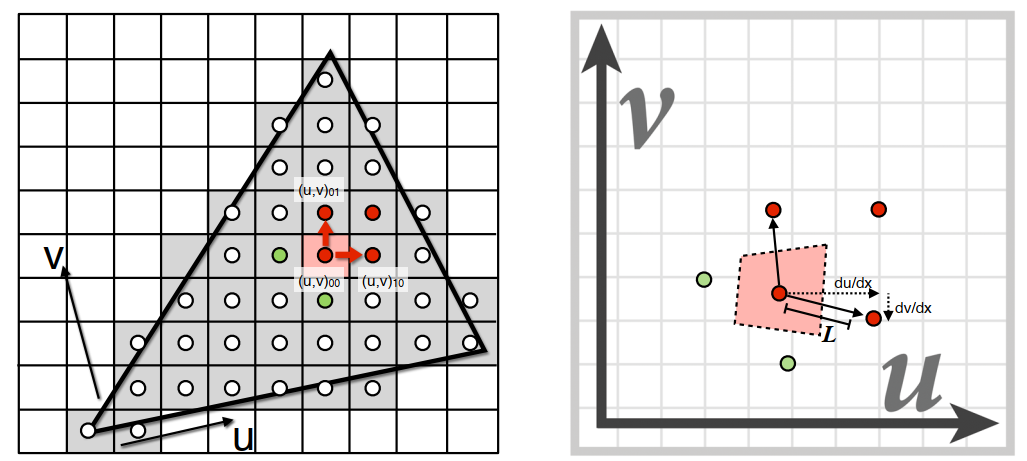
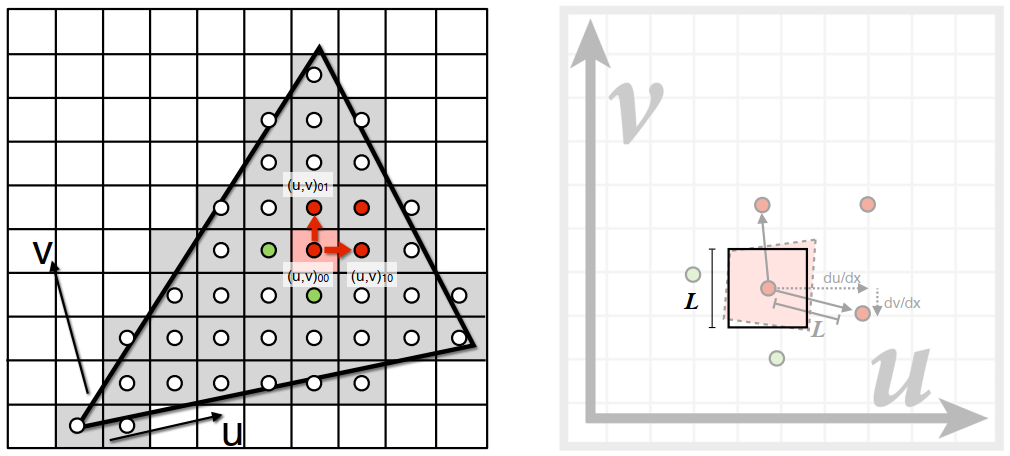
D = log 2 L L = max ( ( d u d x ) 2 + ( d v d x ) 2 , ( d u d y ) 2 + ( d v d y ) 2 ) \begin{aligned} &D = \log_2 L \\[2ex] &L = \max \left( \sqrt{\left(\cfrac{du}{dx}\right)^2 + \left(\cfrac{dv}{dx}\right)^2} , \sqrt{\left(\cfrac{du}{dy}\right)^2 + \left(\cfrac{dv}{dy}\right)^2} \right) \end{aligned} D=log2LL=max⎝⎛(dxdu)2+(dxdv)2,(dydu)2+(dydv)2⎠⎞
计算像素空间上的间隔在纹理空间上对应间隔的微分。
此时计算长度
L
L
L ,获得正方形框,近似计算出红色区域的面积。
- 此时可以先计算该区域变成单个像素的层级数 D = log 2 L D = \log_2 L D=log2L ;
- 然后再在对应层级进行查询。
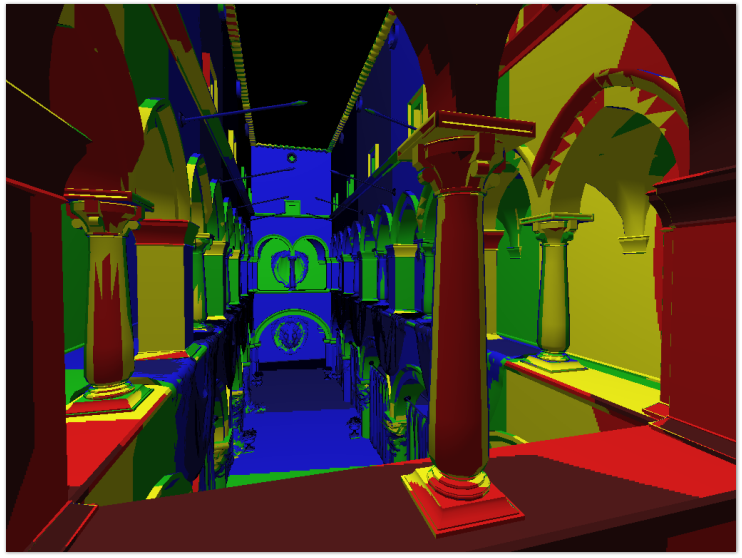
- 如图所示,近处像素需要在低层级进行查询,远处像素需要在高层级进行查询。
- 但因为层级是整数,结果是离散的结果,需要对每层进行插值。
4.2.1 三线性插值(Trilinear Interpolation)
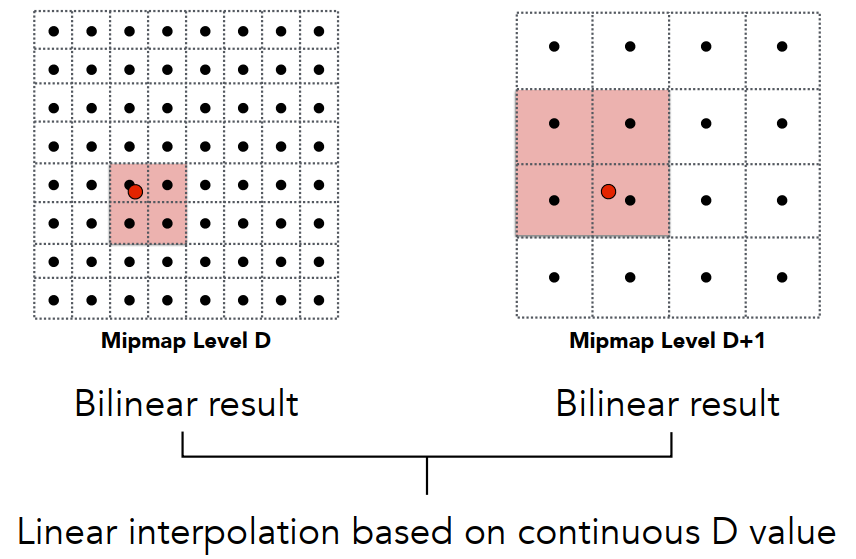
- 先对相邻两个层级分别进行双线性插值。
- 再对其两个结果进行插值计算,整个过程即三线性插值。
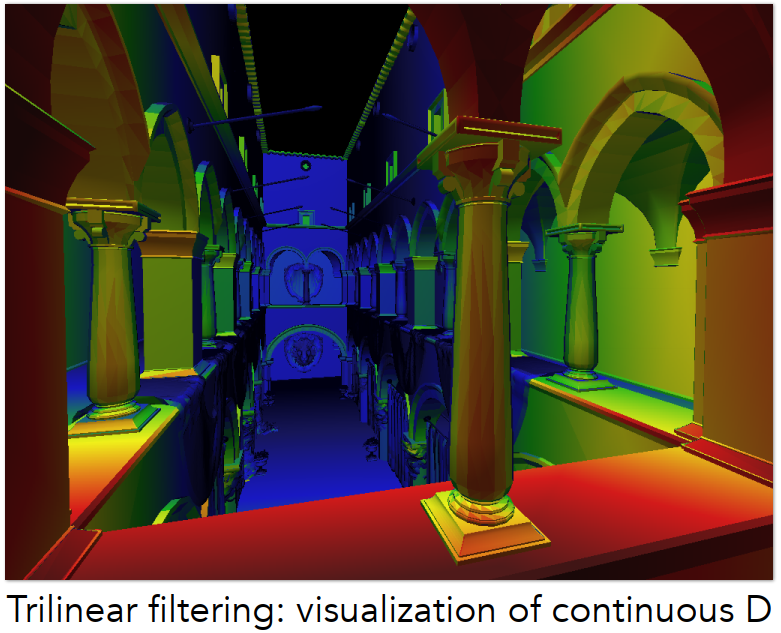
此时层级之间会进行一个过渡。
4.2.2 Mipmap 的局限性
过度模糊化:远处细节过于模糊。
原屏幕空间中的图案映射到纹理空间后会出现不规则的形状。
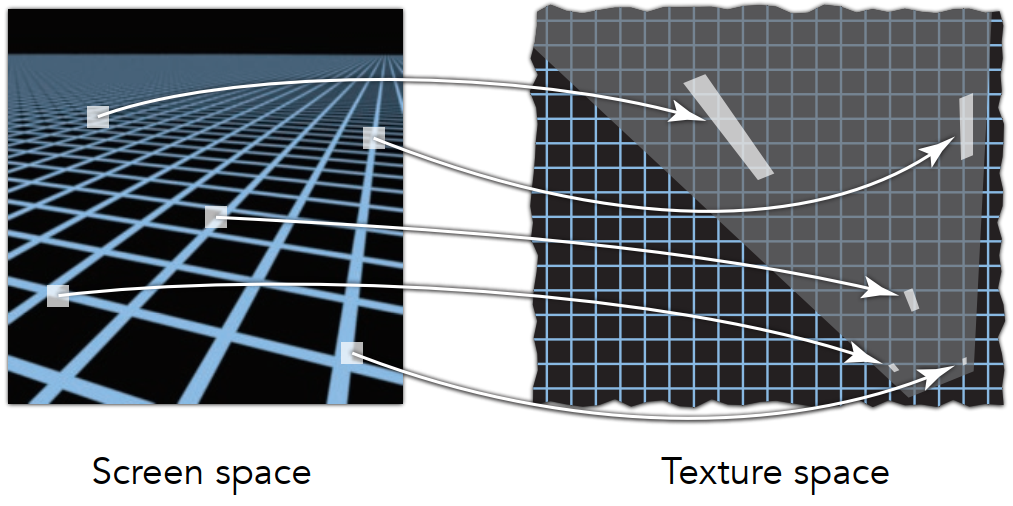
4.2.3 各向异性过滤(Anisotropic Filtering)
地形图和总面积表

- 可以查找 轴对齐的矩形区域 ;
- 可见图中仅对竖直方向或者水平方向做了缩小,比起 Mipmap 多了不均匀的水平或者竖直方向的压缩图;
- 允许对长条状的矩形区域进行查询;
- 但对于斜向矩形区域,即对角线足迹的查询,仍然是一个问题。
NOTE :
- “各向异性2x” :图中左上角 2×2 的区域;
- “各向异性4x” :图中左上角 4×4 的区域。
- 原存储的3倍,显存足够的情况下,可以将各向异性开到最高,不影响其计算力。即不影响性能。
4.2.4 EWA 过滤
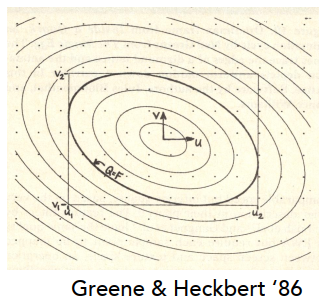
- 使用多个查找
- 加权平均
- Mipmap层次结构仍有帮助
- 可以处理不规则的脚印














 388
388











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









