







Abstract
《Point Pattern Matching Algorithm based on Local Topological Characteristic and Probabilistic Relaxation Labeling》(2016 SCI 会议)
为了减少异常值和噪声对点模式匹配的影响,提出了一种基于局部拓扑特征和概率松弛标记的点模式匹配算法。对于点集中的每个点,用局部邻接点来描述其局部拓扑特征。为了避免现有全局拓扑特征在角度编码上的缺陷,局部拓扑特征采用二进制相邻码。由于角的分配大于距离,在计算点间局部拓扑特征的相似度时,赋予了角较大的权重。最后,定义了一种鲁棒兼容性度量方法,并通过概率松弛标记迭代支持函数以获得最佳匹配结果。对合成数据和真实图像数据的实验表明,在存在异常值和噪声的情况下,LTC-PRL具有良好的匹配性能。
关键词 :点模式匹配;本地拓扑特点;概率;放松标签;那异常值和噪音
1. Introduction
点模式匹配(PPM)在模式识别和计算机视觉中有着广泛的应用,如目标识别[1]、图像分类[2]、立体视觉[3]等。PPM是在模板点集中标识目标点集的对应关系。PPM算法主要有两类。第一类是基于变换参数估计,包括迭代最近邻点(ICP)[4]、软赋值方法[5]等。利用不精确的变换参数,可以得到近似匹配。通过这种近似匹配,可以得到更精确的变换参数。这将迭代,直到获得满意的匹配。由于准确的变换参数只能通过正确的匹配得到,而正确的匹配只能通过准确的变换参数得到,因此第一类PPM算法很难获得良好的匹配性能。另一类是基于特征比较,包括形状上下文[6]、光谱匹配[7]等。通过点集之间的变换,提取出模式中点的不变特征。通过对特征的比较,可以得到对应关系。
基于特征比较的PPM算法由于易于实现和获得满意的匹配而受到广泛的关注。SVD[8]方法首先计算每个点集的点邻近矩阵。然后通过奇异值分解得到矩阵的特征值和特征向量。最后,通过比较不同点集之间的有序特征向量,找到对应关系。分配给每个点的形状上下文(SC)是关于剩余点相对于该点的角度和距离分布。最佳匹配是最小化两个点集之间的整体形状上下文距离。拓扑保持松弛标记(TPRL)计算每个点相邻点的全局拓扑特征[9],并使用松弛标记匹配两个点集。
然而,由于缺失或伪造的点(离群点)和测量系统产生的噪声,这些特征将不再是不变的,而且大多数PPM算法的性能很差。摘要为了减小异常点和噪声对不变性特征的影响,提出了一种基于局部拓扑特征和概率松弛标记的点模式匹配算法。首先,对点集中的每一个点,使用局部邻域内的部分相邻点来描述其局部拓扑特征。由于全局拓扑特征的角度差是不对称的,局部拓扑特征采用了相邻码来避免这个问题。其次,考虑到角的量化程度大于邻域内的距离,在计算点间局部拓扑特征相似度时,赋予角较大的权重。最后,定义了一种鲁棒兼容性度量方法,并通过概率松弛标记迭代支持函数以获得最佳匹配结果。
二、 全局拓扑特征
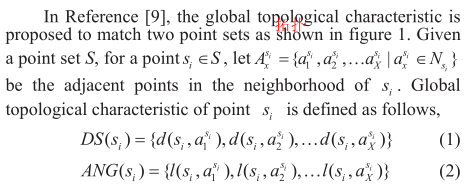


距离赋值是对数坐标上的均匀量子化,它放大了近点的特征信息,压缩了远点的特征信息。


拓扑特性对平移、缩放、旋转和仿射变换不变性,对微小的非刚性变换具有鲁棒性。
三、 局部拓扑特征
如图2所示,噪声会引起点抖动。虚向量表示抖动是偶然的。由于全局拓扑特征中,点
s
i
s_i
si的邻域是非均匀量子化的,靠近点is的邻域对噪声更敏感。特别是在角度量化方面,靠近
s
i
s_i
si的点更容易偏离其它区域,甚至是相反的区域。以图2为例,在相同的噪声影响下,a点相对于
s
i
s_i
si的量子化值比b点更容易改变。

本文仅用部分相邻点来描述点的局部拓扑特征。这些点和
s
i
s_i
si之间的距离大于邻域半径的1 / 3。距离赋值是在直角坐标系下的均匀量子化。与全局拓扑特征相比,局部拓扑特征的计算效率更高,因为用于描述拓扑特征的相邻点数量更少,避免了距离分配中的对数计算。此外,当异常点出现在不使用点来描述拓扑特征的区域时,局部拓扑特征对异常点具有一定的鲁棒性。
在全局拓扑特征中,角度赋值的编码是{0,1,11}。在计算相似性时,角差是不对称的。例如,相邻点位于区域0中。有噪声时,可能会偏离区域1或区域11。区域0和区域1之间的角差是1,而区域0和区域11之间的角差是11。事实上,他们两个都是一个。因此,在局部拓扑特性中,采用相邻码来避免上述问题。代码以二进制字符表示,任何两个相邻区域之间的角差总是1。如图3所示,角度分配有12个区域,代码需要6位。在计算角差时,可以直接使用异或运算符,异或运算符的位数为1,比十进制负号和绝对值运算符的计算速度快得多。


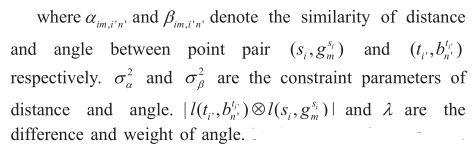
在本文中,
λ
\lambda
λ等于0.7,因为角的量子化程度大于邻域内距离的量子化程度,这意味着角的特征信息更加丰富。
值得注意的是,我们所构造的局部拓扑特征不仅对平移、尺度、旋转和仿射变换具有不变性,而且对异常值和噪声具有鲁棒性。但对于非刚性变换,局部拓扑特征的鲁棒性不如全局拓扑特征,因为它忽略了最邻近点的拓扑信息。
四、 概率松弛标记
对于上下文信息,松弛标记[10]是一个迭代过程,用于减少为一组对象分配符号标签时的模糊性。上下文信息与对象的拓扑结构和标签兼容性约束有关。本文考虑了概率松弛标记,其过程包括证据组合和传播两个步骤。在第一步中,支持函数被定义为通过当前标签概率估计和标签兼容性来修正支持。在第k次迭代时,可以给出将label
ω
i
\omega_i
ωi赋值给object
i
i
i的支持:

这一过程将终止,而一致和明确的标记结果出来。
根据
(
g
m
s
i
,
b
n
t
j
′
)
(g^{s_i}_m,b^{t_{j'}}_n)
(gmsi,bntj′)的局部拓扑特征,定义
(
s
i
,
t
j
′
)
(s_i,t_{j'})
(si,tj′)的鲁棒兼容系数为:
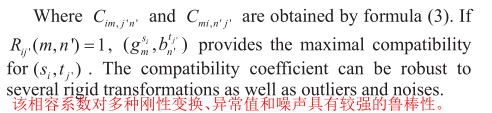
支持函数
S
(
i
,
j
′
)
S(i,j')
S(i,j′)表示
(
s
i
,
t
j
′
)
(s_i ,t_{j'})
(si,tj′)与部分相邻点的匹配支持度。在第k次迭代时,
S
(
i
,
j
′
)
S(i,j')
S(i,j′)表示为:

当匹配概率矩阵
P
(
k
)
=
[
p
(
k
)
(
i
,
j
′
)
]
n
S
×
n
T
P^{(k)}=[p^{(k)}(i,j')]_{n_S\times n_T}
P(k)=[p(k)(i,j′)]nS×nT收敛时,迭代将停止。为了满足一对一的双射匹配,需要实现对矩阵的行和列的[11]归一化。
五、实验与分析
为了验证LTC-PRL的有效性,本节对合成和真实图像数据进行了测试,并将LTC-PRL的匹配性能与ICP、SVD、SC和TPRL进行了比较。
A、 综合数据实验
成数据生成如下:模板点集S由随机生成的点组成。大小 n S n_S nS为40,每个点的位置在单位面积上分布均匀。目标点集T由S随机相似变换生成。变换参数分布均匀,包括缩放因子 s ∈ [ 0.5 , 2 ] s\in[0.5,2] s∈[0.5,2],旋转因子 θ ∈ [ − 9 0 o , 9 0 o ] \theta\in[-90^o,90^o] θ∈[−90o,90o],平移因子 t x , t y ∈ [ − 0.5 , 0.5 ] t_x,t_y\in[-0.5,0.5] tx,ty∈[−0.5,0.5]。
进行了两组实验。在第一组中,T中每个点的位置用零均值的高斯噪声相加,标准差等于最小T (dminT是T中点对的最小距离,delta是噪声水平因子)。
进行了两组实验。在第一组中,T中每个点的位置用零均值的高斯噪声相加,标准差sigma等于 δ ⋅ d m i n T \delta\cdot d_{minT} δ⋅dminT ( d m i n T d_{minT} dminT是T中点对的最小距离,delta是噪声水平因子)。在第二组中,在T中加入 γ ⋅ n T \gamma\cdot n_T γ⋅nT伪点,这些伪点的位置在T区域内均匀分布。 γ \gamma γ是异常值级别因子。每个序列重复100次Monte Carlo实验,并使用平均正确匹配率来评估匹配性能。
两组实验结果如图4所示。由于ICP是通过迭代与点定位的对应关系来实现的,所以当两个点集之间不存在变换时,ICP可以对异常值和噪声引起的误差匹配进行校正。但在实验中,目标点集是由模板点集随机变换而来,这导致ICP的整体性能较差。SC对异常值和噪声具有较强的鲁棒性,但对两个点集之间的旋转变换比较敏感。奇异值分解对两个点集之间的相似变换具有不变性,但对异常值和噪声敏感。因此其正确匹配率急剧下降。TPRL和LTC-PRL对相似变换都具有较强的鲁棒性。然而,与TPRL相比,LTC-PRL对异常值和噪声的鲁棒性更强。


B、 真实图像数据实验
在实验B中,我们使用CMU/VASC模型屋数据库[12]来测试这五种算法,该数据库由111帧玩具屋的移动序列组成。对于每一帧,提取30个对应的点作为点集,图像间隔为
p
i
c
_
i
n
t
e
r
v
a
l
=
{
10
,
20
,
100
}
pic\_interval=\{10,20,100\}
pic_interval={10,20,100},每个
p
i
c
_
i
n
t
e
r
v
a
pic\_interva
pic_interva的图像对为

我们将所有这些图像对分为两组进行匹配,并取平均正确对应。在第一组中,加入高斯噪声,噪声级因子
δ
δ
δ等于1.5。在第二组中,随机抽取5个点,使另一个点集的对应点成为离群点。对于图5所示的示例,与线连接的点对是LTC-PRL运行的正确结果。五种算法的正确匹配率如图6所示。该算法具有较强的鲁棒性和较强的噪声性能。


六、 结论
本文提出了一种新的PPM算法,以减少异常值和噪声的影响。为了使特征对异常值和噪声具有更强的鲁棒性,我们提取了每个点的局部拓扑特征。根据局部拓扑特性,定义了概率松弛标记的鲁棒相容性度量。经过迭代和匹配概率矩阵的双重归一化,得到最终结果。对合成图像和真实图像的实验结果表明,该方法即使存在较强的异常值和噪声,也能获得较好的匹配性能。















 2844
2844











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









