






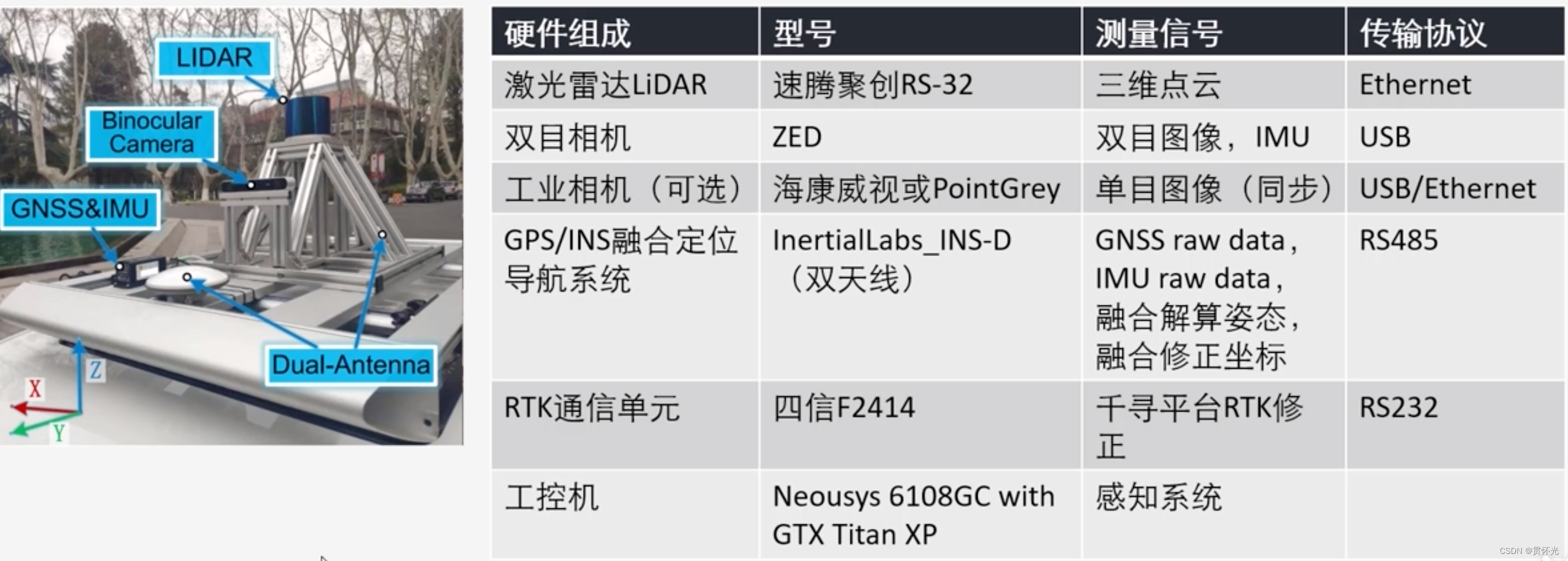
激光雷达硬件平台
图像容量是非常大的,图像帧率是比较高的,相机的帧率可以达到20-30帧,他的数据带宽是比较多的,由于多个相机的话。对比激光来说相对来说少一点,容量在几兆之内
RTK来进行修正、IMU进行修正,因为IMU存在加速度信息。
GNSS通过后处理方式来进行修正
工控机采用6108来进行数据修正,基本使用SSD来进行采集
平台需要考虑硬件传输协议和接口
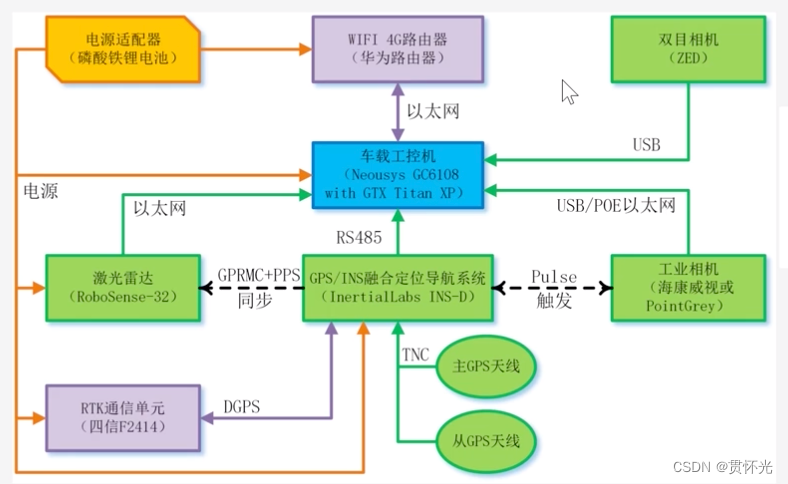
工控机作为整个协议的传输中端。像高速的以太网可以解决,激光 雷达和工业相机的应用。工业相机可以满足一些同步。同步需要GPS时间
GPRMC+PPS是一个带有时间/经纬度的时间戳,激光雷达用来取记录每个时间的位姿。PPS提供了标准的脉冲时间,通过秒脉冲来计算激光相位。在每一帧的时间间隔的情况下,来和时间进行一个对准相位来进行对准。
相机主要分为两个硬触发和软触发,通过工控机来发布脉冲信号。
软件同步:使用系统的时间戳,来做统一的同步
采用GPS双天线,双天线用来计算两个天线的航向/航向角
双目相机也可以获取IMU

激光雷达电器连接
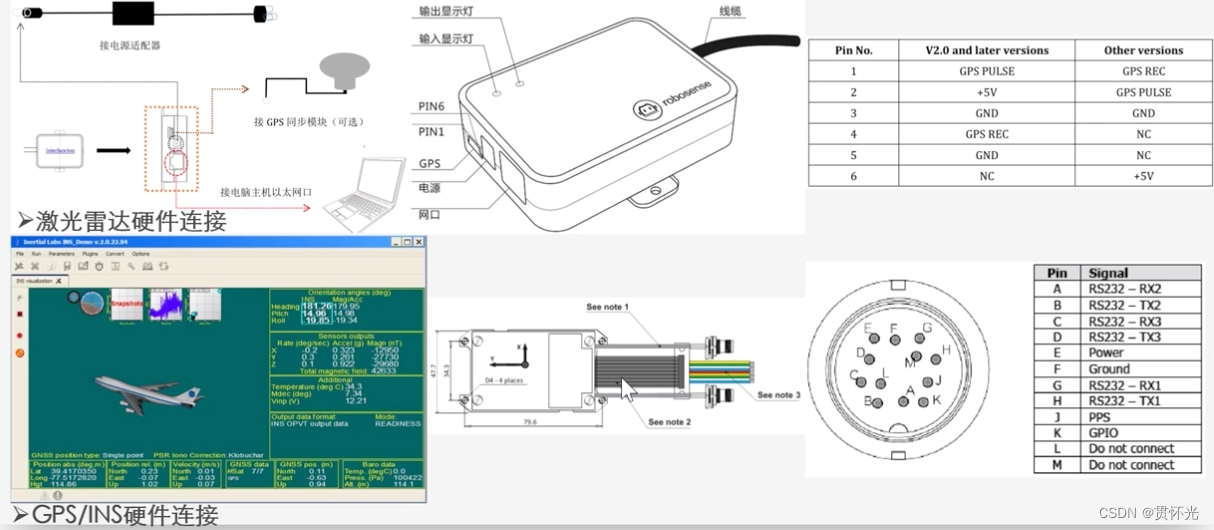
可以获得融合后的RPY,融合后加速度计,词量剂,陀螺仪等信号,以及修正后的记过,更好的辅助SLAM,进行里程计的计算。
系统层面
主要是依赖ROS系统。ROS的可以是分布式的系统,通过分界点和主节点进行一个通信,集合各种传感器的一个机制(通信机制TCP),我们更关心一些,实时性和稳定性的影响。这就是为啥百度改进了ROS的主要原因。
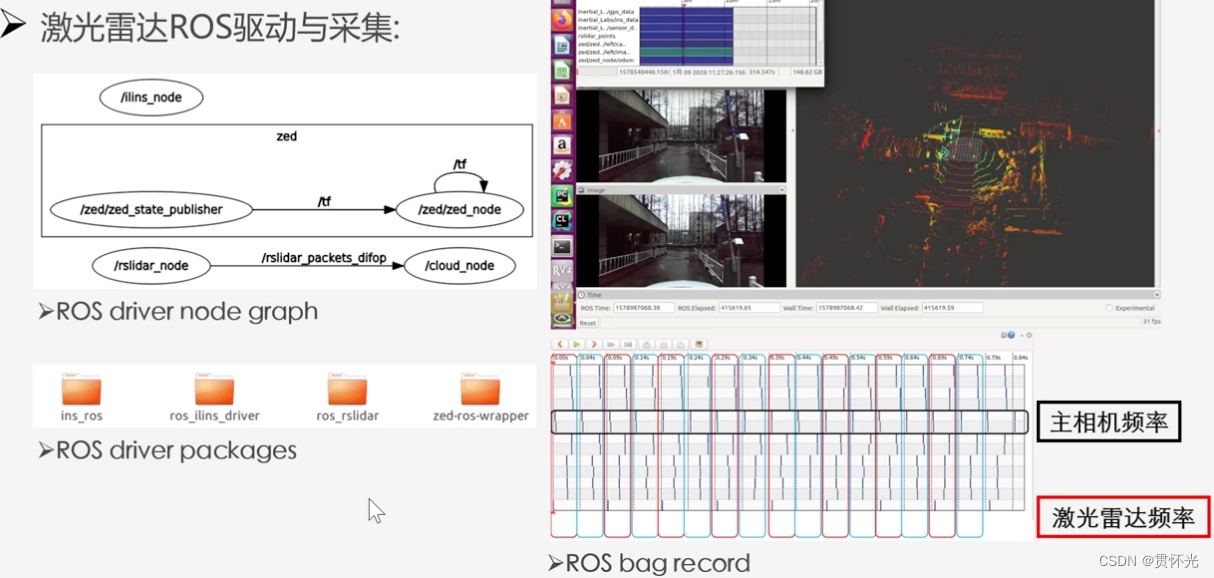
在数据采集中rosbag比较多
机械安装需要考虑机械干涉,相机和激光雷达同轴。这些需要我们考虑电器和电源供给,之后配合整个算法来配合感知和控制系统。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











