







 本文探讨了自主无人系统(如无人车、无人机)的研究背景和国内外现状,强调了多传感器融合在导航定位中的重要性。文章介绍了可观测性和可观测度的概念,并分析了惯性导航系统的控制理论,提出了一种融合一切可用信号源以提高导航可靠性。同时,针对动态环境和传感器性能,提出了自适应融合算法,以应对无人系统在卫星不可用条件下的导航挑战。
本文探讨了自主无人系统(如无人车、无人机)的研究背景和国内外现状,强调了多传感器融合在导航定位中的重要性。文章介绍了可观测性和可观测度的概念,并分析了惯性导航系统的控制理论,提出了一种融合一切可用信号源以提高导航可靠性。同时,针对动态环境和传感器性能,提出了自适应融合算法,以应对无人系统在卫星不可用条件下的导航挑战。
研究背景及意义
-
自主无人系统又称移动机器人(例如无人车、无人机等),是一种集环境感知、导航定位、决策规划、运动控制等功能于一体的智能系统。
-
自主无人系统具有 机动灵活 、 低成本和适应性强 等特点 , 可替代人类完成无人驾驶 、 应急救援和军事作战等任务 , 拓展人类活动空间, 推动军事变革 、 经济发展和社会进步 。(例如美国nana)
在民用和军用方面都非常突出

国内外研究现状
目前在国外都进行相关研究,都非常重视
国外研究现状
美国国防部 《 无人系统综合路线图 》
- 自主性和机器人技术 的进步有可能成为重要的力量倍增器;
- 人工智能在许多领域具有推进无人系统发展的巨大潜力 , 包括: 导航和感知 (多传感器智能融合 ) 、 群体行为和战术等 ,这将有利于开发出具有更高自主性的无人系统 。
美国国防高级研究计划局 ( DARPA ) 提出融合一切可用的信号源 , 以实现高可靠性和高可用性的导航定位;基于因子图提出多源定位导航架构 , 以实现不同传感器的优选组合 。
俄罗斯莫斯科鲍曼国立技术大学提出 “ 功能- - 智能导航(Functional- -t Intelligent Navigation)” 概念 , 设计了新型的智能导航系统 , 并应用在航空电子系统中
加拿大皇家军事学院提出可重配置的多传感器融合导航与定位架构 , 并利用无人引导车 , 通过搭载惯导 、 里程计 、 相机等传感器 , 实现了室内外跨场景传感器切换与无缝导航 。
国内研究现状
中国科协发布 20 个重大科学问题和工程技术难题
10 个工程技术难题为:无人车如何实现在 卫星不可用条件下的高精度智能导航 ?
百度 Apollo 平台包括车辆平台 、 硬件平台 、 软件平台 、 云端数据服务等四部分 。 百度擅长的是软件平台和云端数据 , 车辆平台 、 硬件平台则由生态联盟内的合作伙伴提供
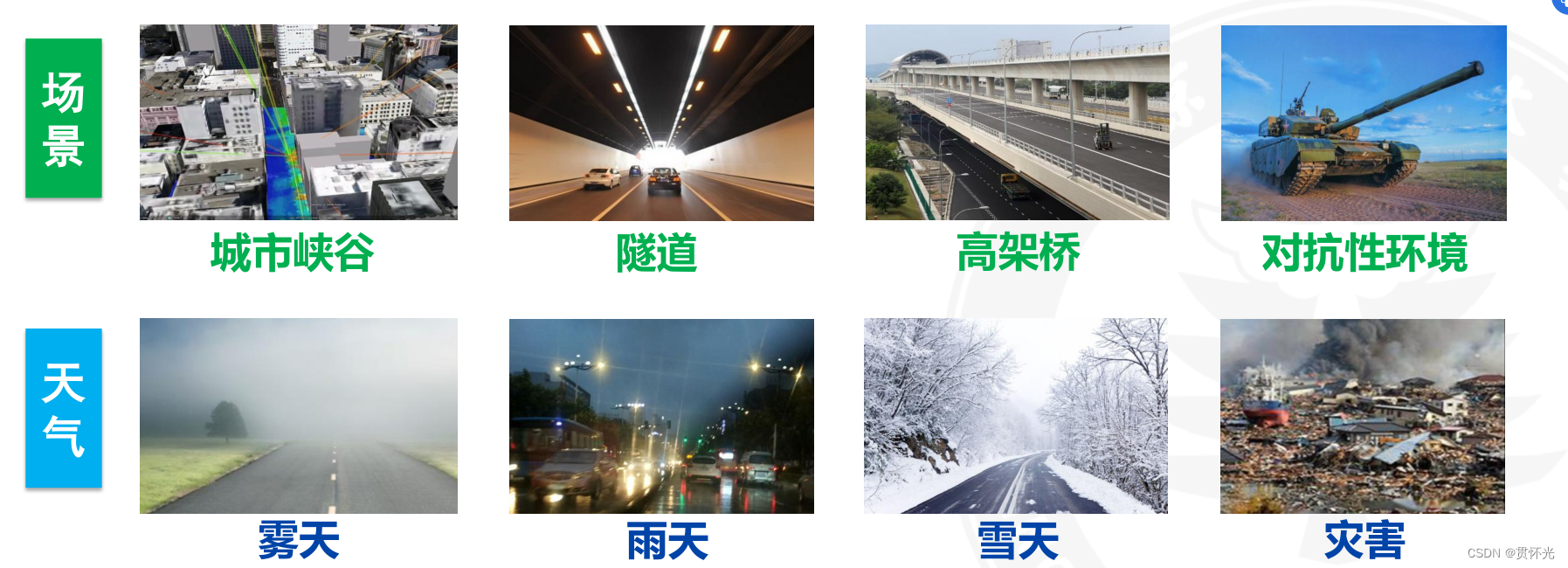
面临的挑战
一种是面临场景的挑战和天气的挑战
可观测性和可观测度
一个系统要求更加智能化,除非让一个系统提出更多智能化的准则,有了这个准则之后可以依据这个准则做智能准则。多数是依靠于传感器的质量评价,来进行传感器的融合和质量控制。
惯性导航系统的控制理论研究
从控制理论的角度看导航系统
1988年 年, ,I.Y. Bar-Itzhack 发表论文《 Control Theoretic Approach to Inertial Navigation Systems》 》 , 从控制理论的角度分析了惯性导航系统的可观测性 , 并给出了可观测性与估计质量 ( 或精度 ) 的关系。 。1992年 年, , I.Y. Bar-Itzhack 等提出了分段式定常系统( (PWCS) )的可观测性分析方法 , 并应用在惯导系统传递对准过程分析中 。
-
系统的可观测性是指是否能够利用有限时间内的系统观测值 ,确定系统的初始状态。
-
可观测度 反映了系统状态变量可被观测的程度。(定量评价,打分)
优势好处
- 分析系统的可观测度 , 可以确定哪些状态估计的比较准确 ,哪些状态难以估计 , 从而判断传感器的工作性能及其环境适应能力 , 为 多传感器优选组合 提供决策依据 。(都可以进行打分)
- 进行模型参数进行调优
- 可观测度与系统状态可估计性 (Estimability) 直接相关 , 在Kalman 滤波性能自评估机制外 , 提供新的 滤波性能表征 方法。
可观测性的分析方法
线性时不变的系统(LTI)系统
rank [ O ( H , Φ ) ] = rank [ H H Φ ⋮ H Φ n − 1 ] = n \operatorname{rank}[\mathrm{O}(\mathbf{H}, \boldsymbol{\Phi})]=\operatorname{rank}\left[\begin{array}{c}\mathbf{H} \\ \mathbf{H} \boldsymbol{\Phi} \\ \vdots \\ \mathbf{H} \boldsymbol{\Phi}^{n-1}\end{array}\right]=n rank[O(H,Φ)]=rank
HHΦ⋮HΦn−1
=n
也就是系统的矩阵参数是不变化的(不随时间的变化而变化)
但是导航系统来讲,导航系统是动态的过程,他不是线性时变(LTV)系统:
rank [ O k ( H , Φ ) ] = rank [ H k H k + 1 Φ k + 1 ⋮ H k + l − 1 Φ k + l − 1 ⋯ Φ k ] = n \operatorname{rank}\left[\mathrm{O}_k(\mathbf{H}, \boldsymbol{\Phi})\right]=\operatorname{rank}\left[\begin{array}{c}\mathbf{H}_k \\ \mathbf{H}_{k+1} \boldsymbol{\Phi}_{k+1} \\ \vdots \\ \mathbf{H}_{k+l-1} \mathbf{\Phi}_{k+l-1} \cdots \boldsymbol{\Phi}_k\end{array}\right]=n rank[Ok(H,Φ)]=rank
HkHk+1Φk+1⋮Hk+l−1Φk+l−1⋯Φk
=n
基于这样的准则,产生了可观测度(标量的)
一方面,从卡尔曼矩阵的P矩阵中得到,这样的可观测矩阵得到,从滤波算法的好坏反推到系统
另一方面,通过可观测性矩阵(是指系统在可观测性的描述),从矩阵中获取信息
结合两个方面构建了准则。
D o O k i = E k [ ( x i ) 2 ] E k [ ( y i ) 2 ] ∑ j = 1 n ( a j , k i ) 2 D o O_k^i=\frac{E_k\left[\left(x^i\right)^2\right]}{E_k\left[\left(y^i\right)^2\right] \sum_{j=1}^n\left(a_{j, k}^i\right)^2} DoO
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1056
1056

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











