








-
画图解释图像卷积滤波的基本原理,并进一步简述常见的图像平滑滤波算法。
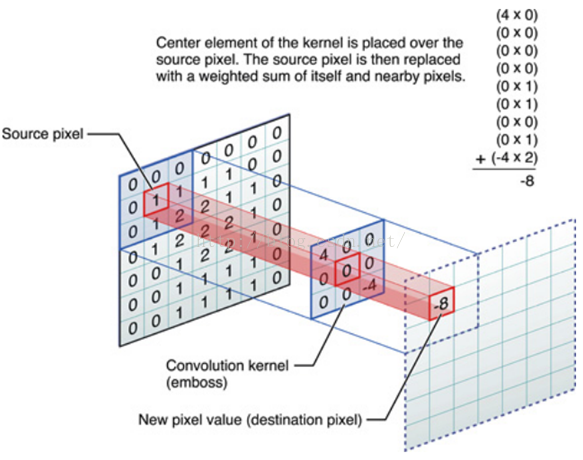
图像卷积(Image Convolution)是卷积核与对应图像的乘积再相加。在图像卷积滤波中,不同算法的区别在于卷积核的不同。
对于滤波器的要求:1、滤波器大小应为奇数,这样才有中心和半径的概念。2、为保证滤波后图像亮度不变,卷积核所有元素之和应等于1。如果大于1则图像会更亮,反之则更暗。3、滤波后的结构有可能出现负数或大于255的值,直接截断为0到255即可,负数也可取绝对值。
常见的图像平滑滤波算法:
平均滤波(卷积核每个格子的值取1,再除值的累积总和)、
加权平均滤波(卷积核采用高斯模版时为高斯滤波——草帽形状高斯函数)、
中值平均滤波(将卷积核范围内的图像矩阵值排列,取中位数)、
数学形态学滤波(先开后闭可以有效去除噪声)与卷积方法稍有不同,它是基于集合的方法。以膨胀为例,如图所示,在按核对原图像平移后取并集得到结果。

查资料(link).可得,图像卷积滤波不仅用于去噪,还可以用于锐化(Sharpness Filter)、边缘检测(Edge Detection)、浮雕(Embossing Filter)、图像模糊(例如高斯模糊( Gaussian Blur)、均值模糊等),区别在于卷积核的不同。 -
简述边缘检测的基本原理,以及Sobel、LoG和Canny算子的原理差异。
首先花十几分钟学习下差分是啥(link)


边缘检测的本质是微分(在计算机中一般不用导数,因为导数有可能出现无穷大的值导致无法计算;区别:导数为某点的斜率,微分:固定dx后的dy,差分:离散函数的微分)。实际中常用差分并且分x方向与y方向,好处是可以减小计算量。同时微分对噪声很敏感,需要进行滤波。
Sobel、LoG和Canny算子的原理差异。上一题的回答已经指出,卷积核的不同是卷积方式的核心区别,同时处理步骤上也有写不同。canny算子的计算步骤为同时计算平滑和微分、梯度计算、梯度幅值非极大值抑制。它的 最好,可以自动连接边缘。但是容易把噪点误判为边界。sobel prewitt log 效果差不多。prewitt比sobel 去噪效果好。roberts马马虎虎。适合什么图片那得看图片的噪点情况,一般canny 算子是最好的。 -
简述图像直方图的基本概念,及使用大津算法进行图像分割的基本原理。
图像直方图是统计图像中各个颜色要素的分布直方图。在将图像二值化时,往往难以确定最佳的阈值,而他可以通过大津算法可以自动确定,其原理是使灰度直方图背景和目标的两峰类间方差最大。 -
简述Harris算子对角点的定义,进行角点检测的基本原理,并说明引入角点响应函数的意义。
定义:进行任意方向的灰度积分值均剧烈变化的点。基本原理:对图像像素点按不同方向进行灰度积分。若为平坦区域(Flat region)灰度积分变化不大;若为边缘(Edge)灰度积分眼某一方向变化大;若为角点(Corner)则沿任意方向变化大。

Harris角点检测原理如图,在边缘处不易界定灰度变化是否剧烈,所以引入角点响应函数。 -
简述Hough变换的基本原理(包括参数空间变换及参数空间划分网格统计)。
为了提高鲁棒性(Robustness)而使用参数空间变换的方法,将直线投影为参数空间的一个点,而直线上的点投影为正弦曲线,一条直线上的点投影出来的正弦曲线会相交为一个点。利用空间划分网格,将同一网格上的点统计起来并计数,当达到一定数量(阈值)的时候,将这个点记录为所求的直线。 -
简述SIFT原理(重点是尺度空间和方向直方图原理)及ORB算子原理(重点是FAST和BRIEF)。
Scale Invariant Feature Transform(尺度不
变特征变换),特点是对旋转、尺度缩放、亮度变化等保持不变性,是一种稳定的局部特征。尺度空间:尺度空间中各尺度图像的模糊程度逐渐变大,能够模拟人在距离目标由近到远时目标在视网膜上的形成过程。计算机模仿人体组建尺度空间,通过把不同尺度的图像提供给计算机来构建。在具体操作中,可以先通过高斯函数与原图像卷积,然后经过下采样建立原始图像的尺度空间模型。方向直方图:为了使检测出的关键点具有旋转不变性,所以要为每一个关键点分配一个基准方向,将基准方向从0到360度统计出来并生成梯度方向直方图,并将直方图的顶峰作为主方向,80%以上作为辅方向。将每一个点的位置、尺度、方向统计后生成描述符即可描述图像并不随各种变化而改变,比如光照变化、视角变化等等。
ORB(Oriented FAST and Rotated BRIEF)是一种快速特征点提取和描述的算法。其分为两部分,特征点选取和特征点描述,分别由FAST(Features from Accelerated Segment Test)算法和BRIEF(Binary Robust Independent Elementary Features)算法发展而来。ORB = oFast + rBRIEF,据称ORB算法的速度是sift的100倍。在SLAM及无人机视觉中有广泛应用。称为oFast(FAST keypoint Orientation)是为了实现旋转不变性而加入了特征点描述方向。通过灰度值的大小来选定特征点,然后建立金字塔和利用矩法实现尺度不变性和旋转不变性。ORB的特征描述称为rBRIEF(Rotation-Aware Brief),即在BRIEF的基础上加入旋转因子。BRIEF算法将像素点两两配对,并将按大小将每对像素以0或1标记。
计算机视觉处理算法基础及视觉特征提取
最新推荐文章于 2024-05-23 02:46:45 发布
















 3658
3658











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









