







Background
新兴应用的发展加速了数据量的产生,增加了通信网络覆盖的需求。为了满足容量(capacity)和覆盖(coverage)的需求,大多数场景都可以通过密集部署接入点(access point, AP)和地面基站(BS)来满足需求,但是对一些特定场景,比如,临时热点区域(temporary hotspot regions)和 应急区域(emergency areas),考虑到经济因素和部署区域的局限性,部署大量的AP/BS是不合适的。无人机(unmanned aerial vehicle, UAV)作为B5G/6G的一项关键使能技术,得益于灵活部署、高移动性、高概率视距(LoS)链路的建立,其可以作为空中基站提供更好的链路质量和更高的覆盖自由度。
由于频谱资源有限,网络越来越密集,在多无人机无线通信系统中,同信道干扰是不可避免的。无人机通信网络的一个关键研究问题是严重干扰引起的性能下降。在所有可能的方法中,通过形成指向服务设备的定向波束,波束成形是一种高效的技术,可以减少严重干扰并提高通信系统的可靠性。
当多个无人机同时跟地面用户传输信息时,定向波束(directional beamforming)是减少同信道干扰的一个有效办法。然而,定向波束容易受气流、估计误差等因素的影响,从而导致收发端波束无法对准。因此,我们需要一个可以刻画波束对准情况的3D模型。
3D Sectorized Antenna Pattern
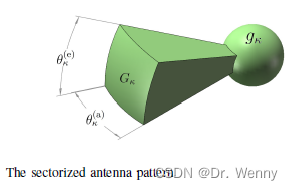
为了减少干扰,从而提高覆盖性能,无人机和用户(UE)都配备了多个天线,可以形成定向波束成形。 为了分析可追踪性,无人机和UE的天线阵列方向图由3D扇形天线方向图建模。
如图所示,该模型由四个参数描述,即主瓣(main-lobe)增益
G
κ
G_κ
Gκ、旁瓣(side-lobe)增益
g
κ
g_κ
gκ、方位角(azimuth)中的半功率波束宽度
θ
k
(
a
)
\theta_k^{(a)}
θk(a) 和仰角(elevation)中的半功率波束宽度
θ
k
(
e
)
\theta_k^{(e)}
θk(e)。下标
k
k
k 表示某个无人机或用户。
基于该3D模型,就可以用波束定向误差(beamsteering errors)来刻画收发端的波束是否对准,当误差在主瓣允许的误差范围内,则视为发端主瓣和收端主瓣进行了对准。因为是在3D场景刻画的模型,波束定向误差分为方位角误差和仰角误差。收发端的波束对准分为 4 种情况:
- UAV主瓣和UE主瓣对准,总的波束增益为收发端的波束增益直接相乘 G U A V G U E G_{\rm UAV}G_{\rm UE} GUAVGUE;这种情况称为 perfect beam alignment;
- UAV主瓣和UE旁瓣对准,总的波束增益为 G U A V g U E G_{\rm UAV}g_{\rm UE} GUAVgUE;
- UAV旁瓣和UE主瓣对准,总的波束增益为 g U A V G U E g_{\rm UAV}G_{\rm UE} gUAVGUE;
- UAV旁瓣和UE旁瓣对准,总的波束增益为 g U A V G U E g_{\rm UAV}G_{\rm UE} gUAVGUE.
波束不对准情况下,总的波束增益是一个取决于波束定向误差的随机变量。主瓣对准的情况,要求方位角和仰角波束定向误差都在各自平面的半功率波瓣宽度内。
该模型可以理解主瓣是定向的,旁瓣是全向的,主瓣的定向由两个平面(即水平面方位角角和垂直面仰角)的全功率波瓣宽度来指定。方位角范围 [ 0 , 2 π ) [0, 2\pi) [0,2π),仰角范围 [ 0 , π 2 ) [0, \frac{\pi}{2}) [0,2π),知道半功率波瓣宽度的取值范围,从而可以计算主瓣波束增益的出现概率 p m = θ ( a ) θ ( e ) 2 π ∗ π / 2 = θ ( a ) θ ( e ) π 2 p_m = \frac{\theta^{(a)}\theta^{(e)}}{2\pi*\pi/2}=\frac{\theta^{(a)}\theta^{(e)}}{\pi^2} pm=2π∗π/2θ(a)θ(e)=π2θ(a)θ(e),旁瓣概率为 1 − p m 1-p_m 1−pm.
To be Supplemented
查一下在UAV通信系统中部署 multi-UAV 的优点是什么,尤其是跟 multi-UAVs cooperation 的区别?


















 729
729

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









