









一、简介
-
本文介绍RK3588平台的Camera:MIPI-CSI调试之通路解析
-
MIPI联盟,即移动产业处理器接口(Mobile Industry Processor Interface 简称MIPI)联盟。MIPI(移动产业处理器接口)是 MIPI联盟发起的为移动应用处理器制定的开放标准和一个规范。
目的是把手机内部的接口如摄像头、显示屏接口、射频/基带接口等标准化,从而减少手机设计的复杂程度和增加设计灵活性。
-
CSI & DSI
• CSI ( Camera Serial Interface ):摄像头接口
• DSI ( Display Serial Interface ):显示接口
二、 名词解释:
-
ISP ( Image Signal Processor ): 即图像信号处理模块, 主要作用是对前端图像传感器输出的信号做后期处理,依赖于 ISP 才能在不同的光学条件下都能较好的还原现场细节。
-
VICAP( Video capture ):视频捕获单元
三、RK3588 的camera通路:
多sensor支持:
- 单路硬件isp最多支持4路复用,isp复用情况支持分辨率如下:
- 2路复用:最大分辨率3840x2160,dts对应配置2路rkisp_vir设备。
- 3路或4路复用:最大分辨率2560x1536,dts对应配置3或4路rkisp_vir设备。
- 硬件支持最多采集7路sensor:6mipi + 1dvp,多sensor软件通路如下:
下图是RK3588 camera连接链路示意图,可以支持7路camera。

四、 链路解析:

-
图中:mipi camera2—> csi2_dphy1 —> mipi2_csi2 —> rkcif_mipi_lvds2—>rkcif_mipi_lvds2_sditf —>rkisp0_vir2
-
对应节点:imx415 —> csi2_dphy0 —> mipi2_csi2 —> rkcif_mipi_lvds2—>rkcif_mipi_lvds2_sditf —>rkisp0_vir2
-
链接关系:sensor—> csi2 dphy---->mipi csi host—>vicap
-
实线链路解析: Camera sensor —> dphy —> 通过mipi_csi2模块解析mipi协议—> vicap ( rkcif节点代表vicap )
-
虚线链路解析:vicap —> rkcif_mipi_lvds2_sditf —> isp
每个vicap节点与isp的链接关系,通过对应虚拟出的XXX_sditf来指明链接关系。
五、RK3588硬件通路框图

-
rk3588支持2个isp硬件,每个isp设备可虚拟出多个虚拟节点,软件上通过回读的方式,依次从ddr读取每一路的图像数据进isp处理。对于多摄方案,建议将数据流平均分配到两个isp上。
-
回读:指数据经过vicap采集到ddr,应用获取到数据后,将buffer地址推送给isp,isp再从ddr获取图像数据。
六、详细解析:
-
imx415 : Camera sensor
-
csi2_dphy0 : rk3588支持2个dphy硬件,这里我们称之为dphy0_hw/dphy1_hw ,,两个dphy硬件都可以工作在full mode 和split mode两种模式下。
当使用dphy0_hw:
-
full mode:节点名称使用csi2_dphy0,最多支持4 lane。
当dphy0_hw使用full mode时,链路需要按照csi2_dphy1这条链路来配置,但是节点名称csi2_dphy1需要修改为csi2_dphy0,软件上是通过phy的序号来区分phy使用的模式。 -
split mode:拆分成2个phy使用,分别为csi2_dphy1(使用0/1 lane)、csi2_dphy2(使用2/3 lane),每个phy最多支持2 lane。
当使用dphy1_hw:
-
full mode:节点名称使用csi2_dphy3,最多支持4 lane。
当dphy1_hw使用full mode时,链路需要按照csi2_dphy4这条链路来配置,但是节点名称csi2_dphy4需要修改为csi2_dphy3,软件上是通过phy的序号来区分phy使用的模式。 -
split mode:拆分成2个phy使用,分别为csi2_dphy4(使用0/1 lane)、csi2_dphy5(使用2/3 lane),每个phy最多支持2 lane。
-
dcphy:
rk3588支持两个dcphy,节点名称分别为csi2_dcphy0/csi2_dcphy1。每个dcphy硬件支持RX/TX同时使用,对于camera输入使用的是RX。支持DPHY/CPHY协议复用;需要注意的是同一个dcphy的TX/RX只能同时使用DPHY或同时使用CPHY。其他dcphy参数请查阅rk3588数据手册。 -
使用上述mipi phy节点,需要把对应的物理节点配置上。
(csi2_dcphy0_hw/csi2_dcphy1_hw/csi2_dphy0_hw/csi2_dphy1_hw) -
每个mipi phy都需要一个csi2模块来解析mipi协议,节点名称分别为mipi0_csi2~mipi5_csi2。
-
rk3588所有camera数据都需要通过vicap,再链接到isp。rk3588仅支持一个vicap硬件,这个vicap支持同时输入6路mipi phy,及一路dvp数据,所以我们将vicap分化成rkcif_mipi_lvds~rkcif_mipi_lvds5、rkcif_dvp等7个节点,各个节点的绑定关系需要严格按照框图的节点序号配置。
-
每个vicap节点与isp的链接关系,通过对应虚拟出的XXX_sditf来指明链接关系。
-
rk3588支持2个isp硬件,每个isp设备可虚拟出多个虚拟节点,软件上通过回读的方式,依次从ddr读取每一路的图像数据进isp处理。对于多摄方案,建议将数据流平均分配到两个isp上。
-
直通与回读模式:
•直通:指数据经过vicap采集,直接发送给isp处理,不存储到ddr。需要注意的是hdr直通时,只有短帧是真正的直通,长帧需要存在ddr,isp再从ddr读取。•回读:指数据经过vicap采集到ddr,应用获取到数据后,将buffer地址推送给isp,isp再从ddr获取图像数据。
•在dts配置时,一个isp硬件,如果只配置一个虚拟节点,默认使用直通模式,如果配置了多个虚拟节点默认使用回读模式。
七、单路Camera的dts配置说明:( 以imx415摄像头为例 )
- 案例场景:这里使用的是csi2_dphy0的单路camera配置:
- 链路配置: imx415 —> csi2_dphy0 —> mipi2_csi2 —> rkcif_mipi_lvds2—>rkcif_mipi_lvds2_sditf —>rkisp0_vir2
&i2c3 {
status = "okay";
imx415: imx415@1a {
status = "okay";
compatible = "sony,imx415";
reg = <0x1a>;
clocks = <&cru CLK_MIPI_CAMARAOUT_M3>;
clock-names = "xvclk";
pinctrl-names = "default";
pinctrl-0 = <&mipim0_camera3_clk>;
power-domains = <&power RK3588_PD_VI>;
pwdn-gpios = <&gpio1 RK_PB0 GPIO_ACTIVE_HIGH>;
reset-gpios = <&gpio4 RK_PA0 GPIO_ACTIVE_LOW>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "CMK-OT2022-PX1";
rockchip,camera-module-lens-name = "IR0147-50IRC-8M-F20";
port {
imx415_out0: endpoint {
remote-endpoint = <&mipidphy0_in_ucam0>;
data-lanes = <1 2 3 4>;
};
};
};
camera_imx219: camera-imx219@10 {
status = "disabled";
compatible = "sony,imx219";
reg = <0x10>;
clocks = <&clk_cam_24m>;
clock-names = "xvclk";
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "rpi-camera-v2";
rockchip,camera-module-lens-name = "default";
port {
imx219_out0: endpoint {
remote-endpoint = <&mipidphy0_in_ucam1>;
data-lanes = <1 2>;
};
};
};
};
&csi2_dphy0_hw {
status = "okay";
};
&csi2_dphy0 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipidphy0_in_ucam0: endpoint@1 {
reg = <1>;
remote-endpoint = <&imx415_out0>;
data-lanes = <1 2 3 4>;
};
mipidphy0_in_ucam1: endpoint@2 {
reg = <2>;
remote-endpoint = <&imx219_out0>;
data-lanes = <1 2>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
csidphy0_out: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi2_csi2_input>;
};
};
};
};
&mipi2_csi2 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi2_csi2_input: endpoint@1 {
reg = <1>;
remote-endpoint = <&csidphy0_out>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi2_csi2_output: endpoint@0 {
reg = <0>;
remote-endpoint = <&cif_mipi2_in0>;
};
};
};
};
&rkcif {
status = "okay";
};
&rkcif_mipi_lvds2 {
status = "okay";
port {
cif_mipi2_in0: endpoint {
remote-endpoint = <&mipi2_csi2_output>;
};
};
};
&rkcif_mipi_lvds2_sditf {
status = "okay";
port {
mipi_lvds2_sditf: endpoint {
remote-endpoint = <&isp0_vir0>;
};
};
};
&rkcif_mmu {
status = "okay";
};
&rkisp0 {
status = "okay";
};
&isp0_mmu {
status = "okay";
};
&rkisp0_vir0 {
status = "okay";
port {
#address-cells = <1>;
#size-cells = <0>;
isp0_vir0: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi_lvds2_sditf>;
};
};
};
&pinctrl {
camera {
cam_pwdn_gpio: cam-pwdn-gpio {
rockchip,pins = <1 RK_PB0 RK_FUNC_GPIO &pcfg_pull_up>;
};
};
};
八、 调试技巧
8.1 i2c设备的通用调试命令:查看设备是否挂载到i2c总线下:
i2cdetect -y 3
8.2 摄像命令
- Linux系统摄像命令:
gst-launch-1.0 v4l2src device=/dev/video11 ! video/x-raw,format=NV12,width=3840,height=2160, framerate=30/1 ! xvimagesink
-
Android系统:
Android系统自带相机APP。点击APP,看摄像画面是否正常显示。
8.3 imx415 相关的log信息
dmesg | grep imx415
8.4 查看拓扑结构
media-ctl -d /dev/media0 -p
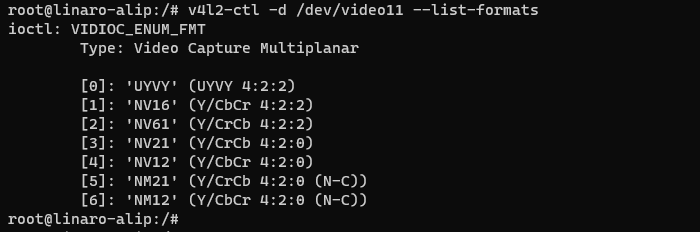
8.5 查看节点采集格式
查看 video11 支持采集的格式,以 video11 为例。
v4l2-ctl -d /dev/video11 --list-formats
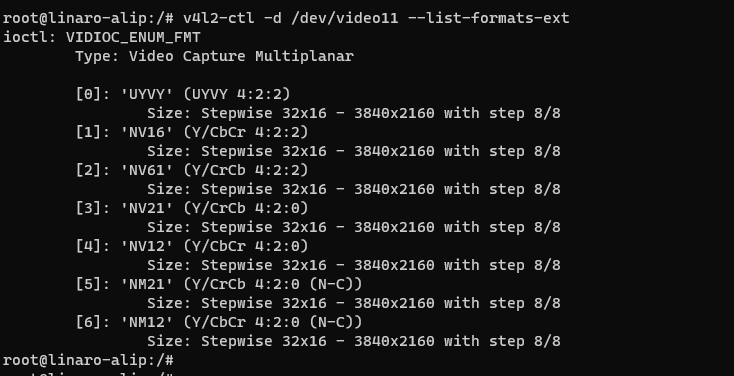
8.6 查看节点支持的分辨率
下图为video11节点: imx415 摄像头支持4K(3840x2160)的查询结果。



















 313
313

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











