







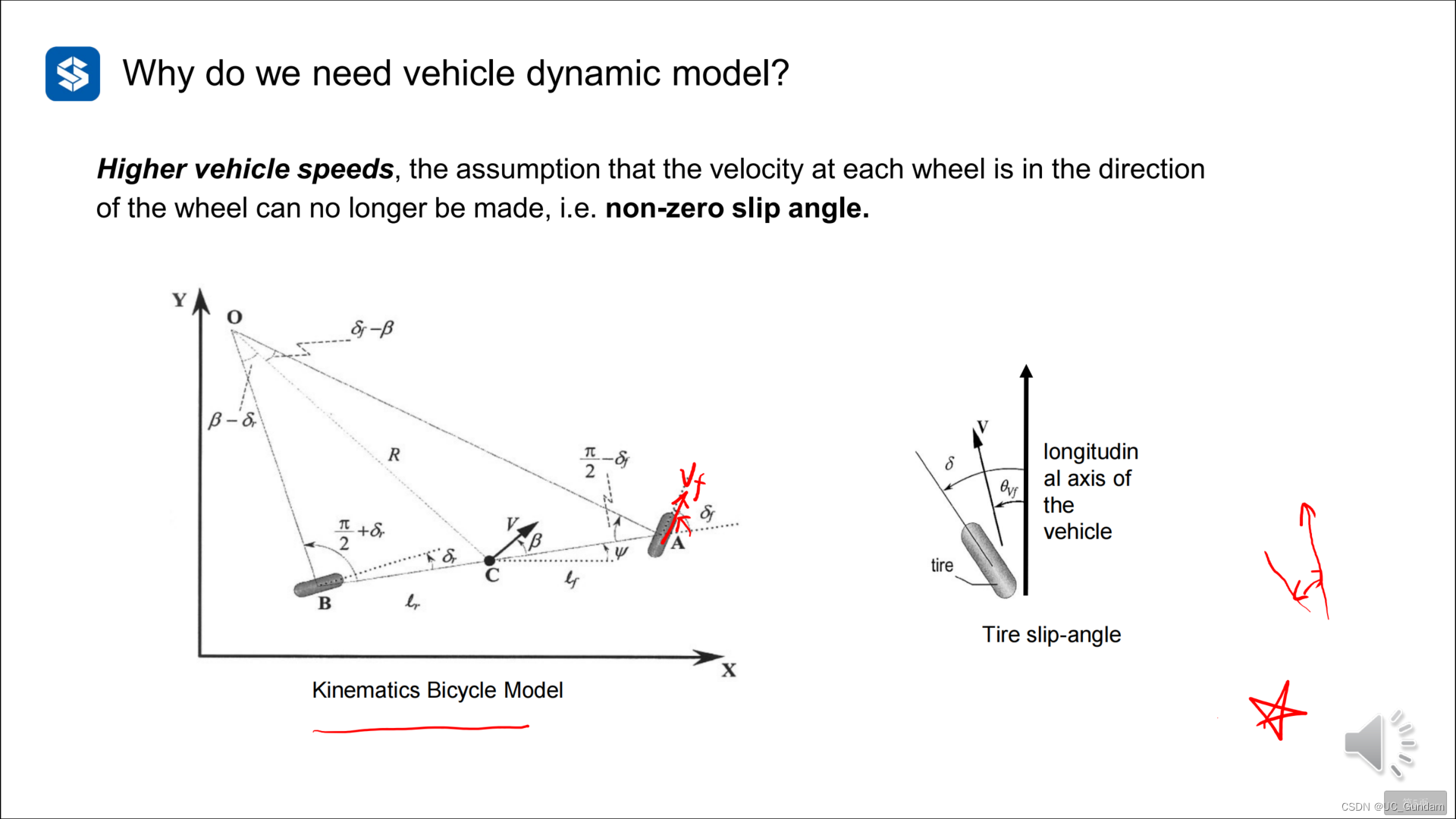
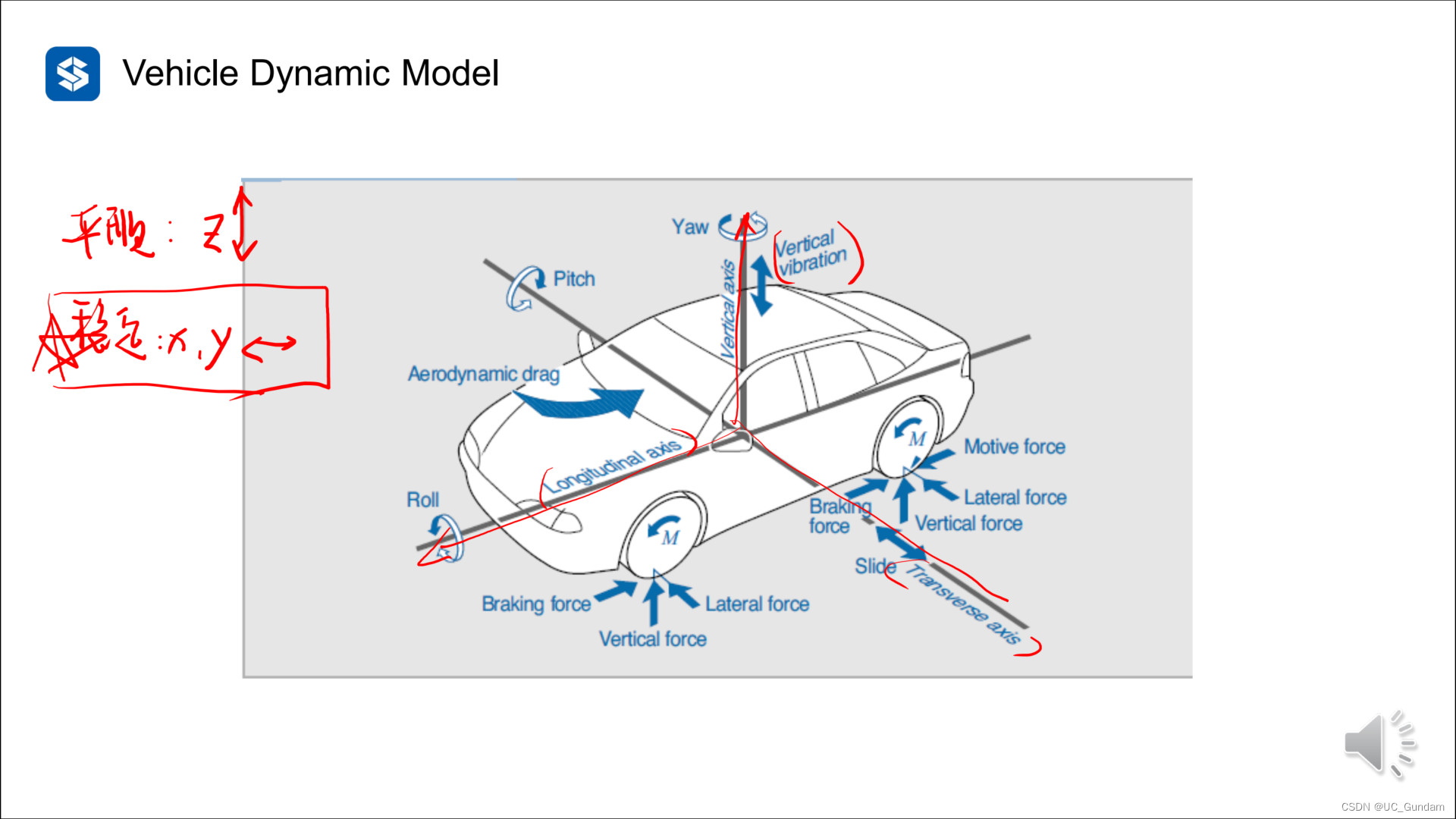
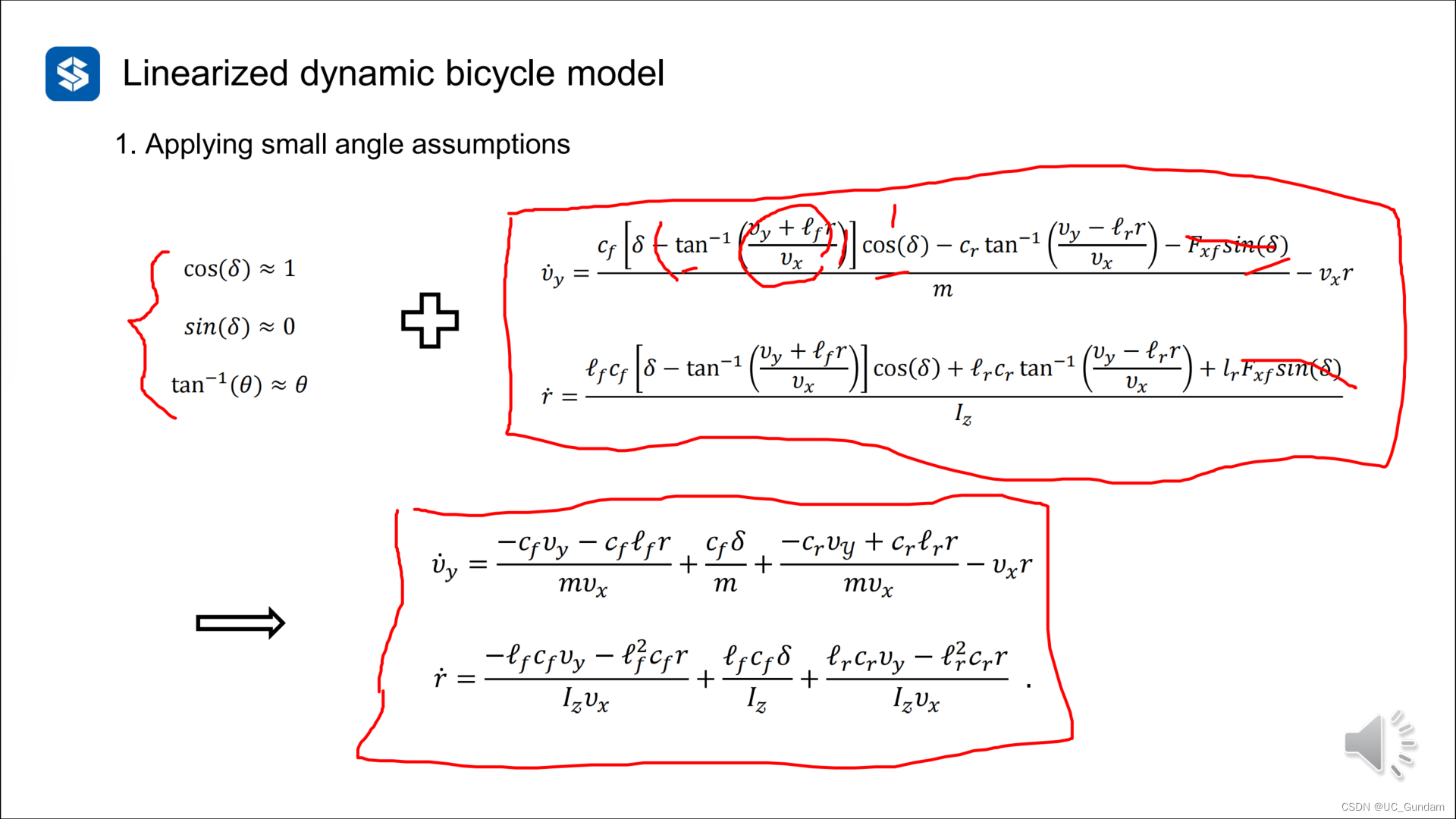
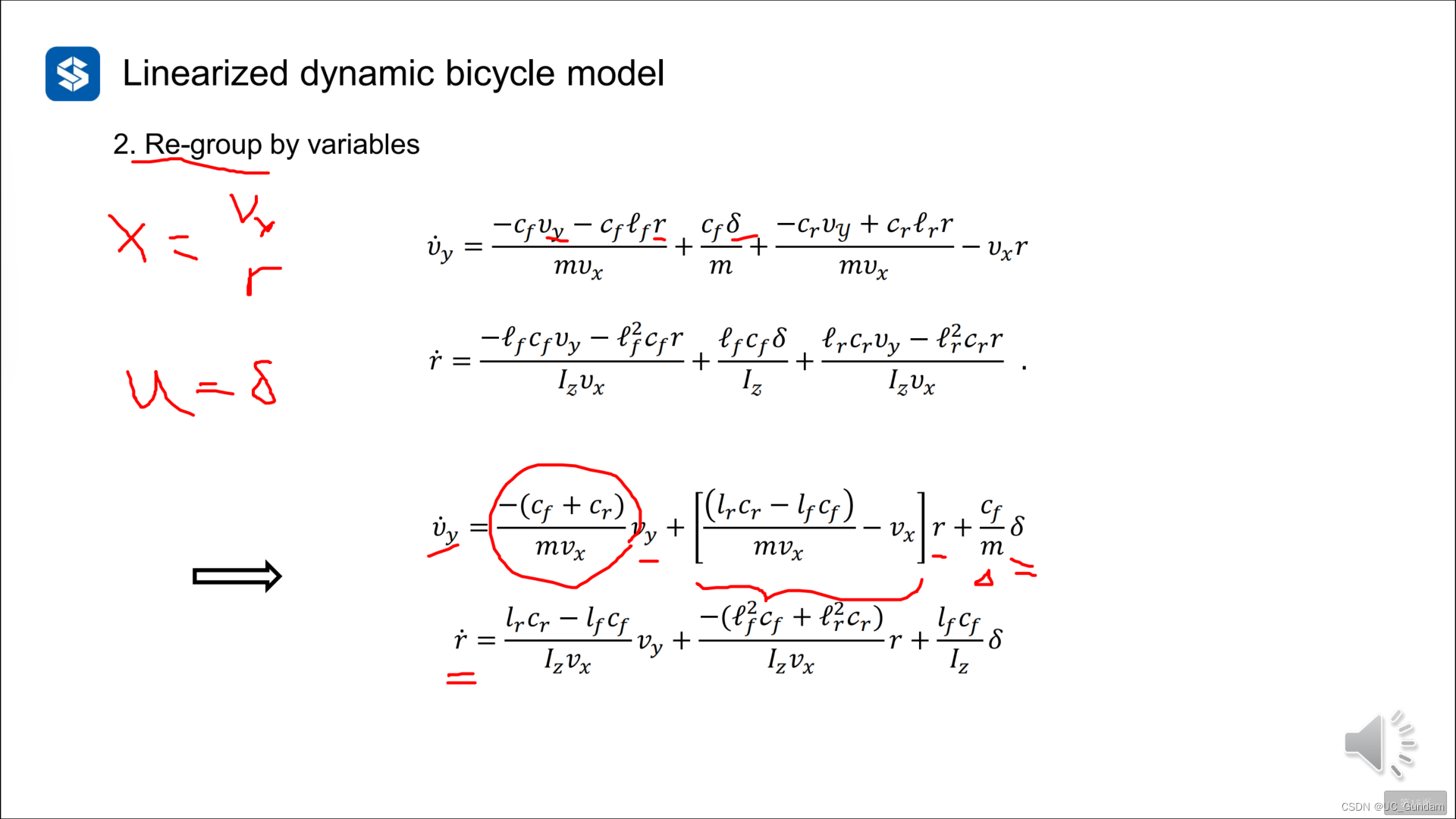
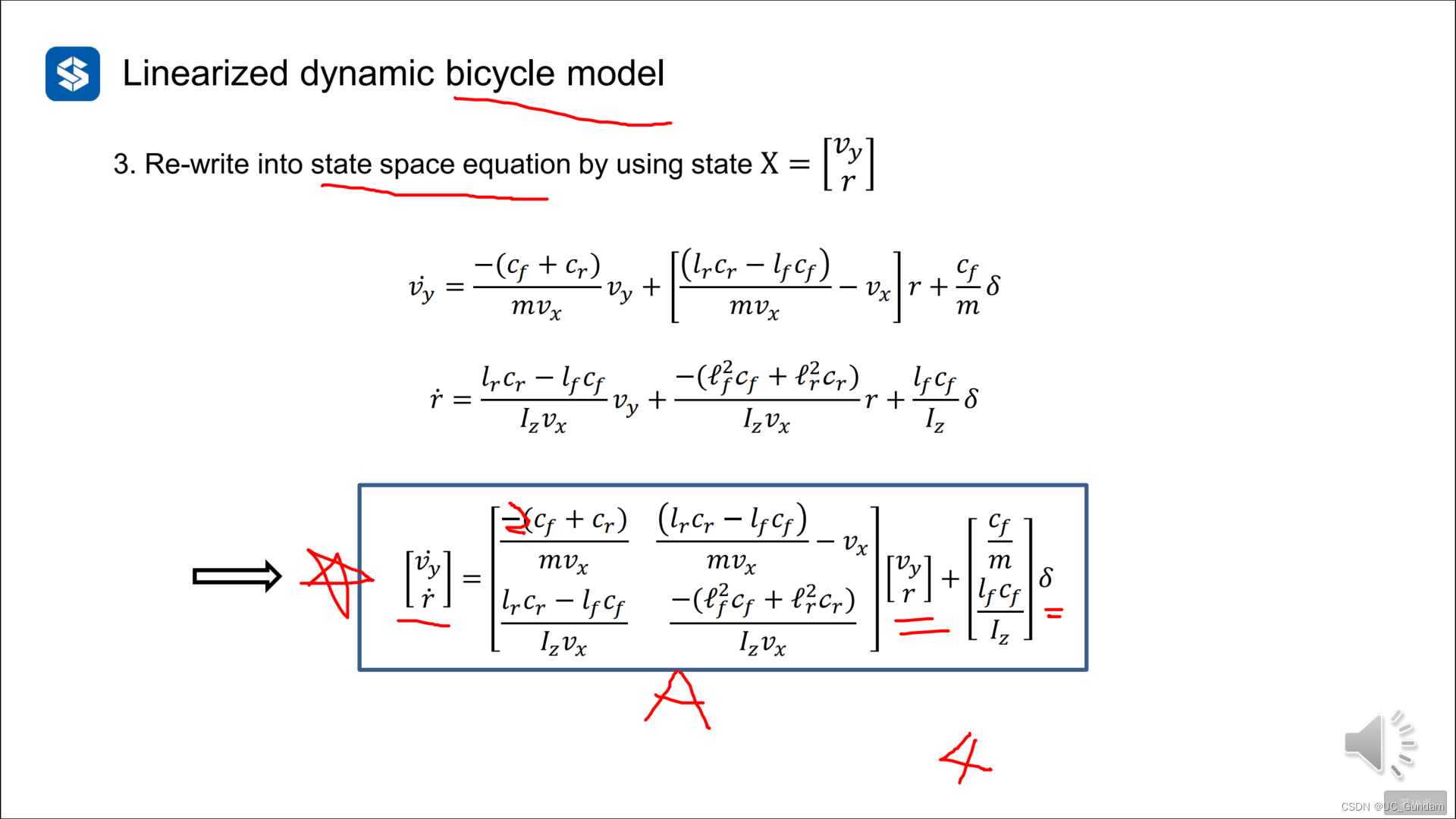
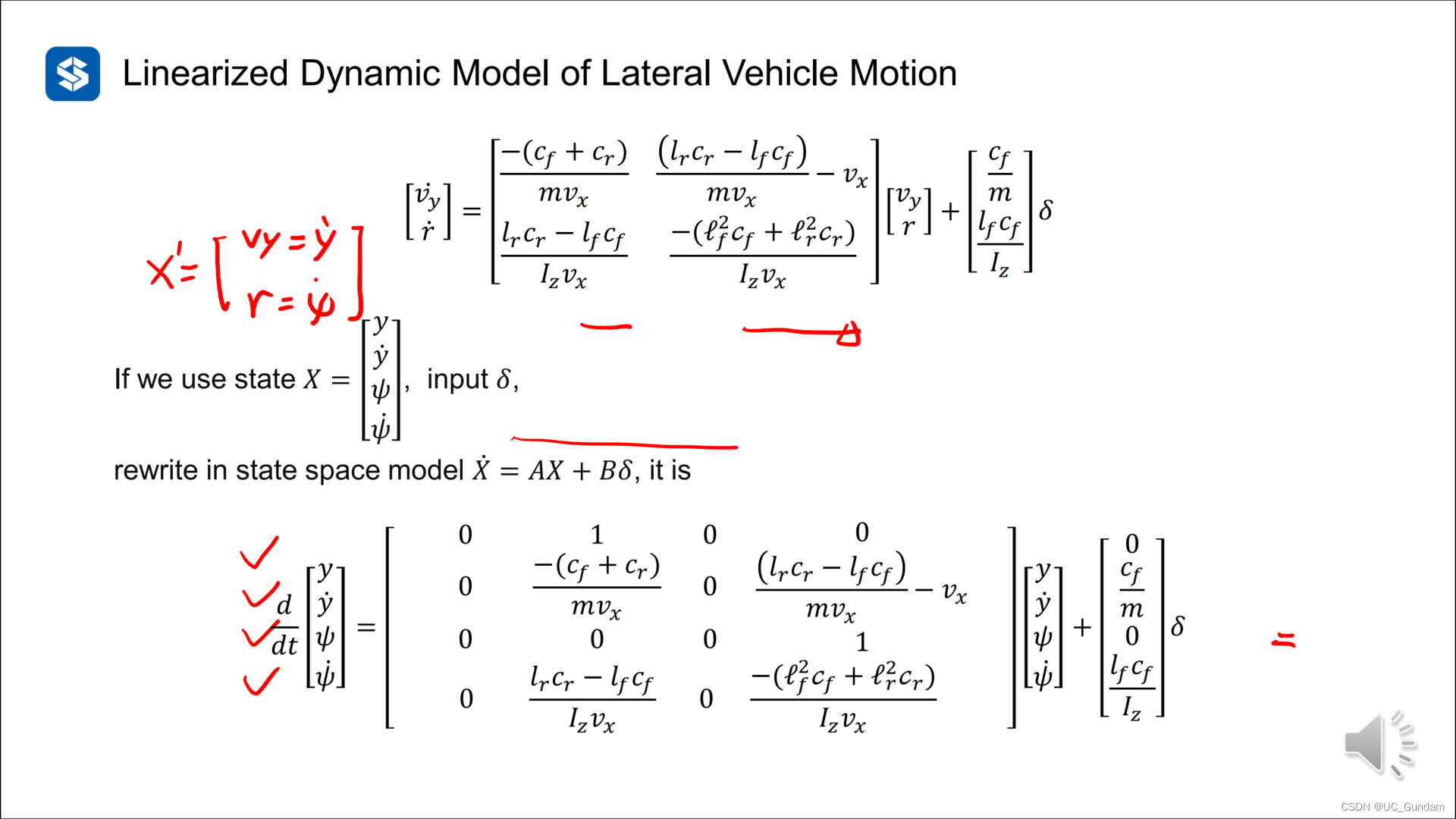
1 车辆横向动力学模型
高速时,轮胎的朝向和车辆的速度方向是不一致的。
1.1横向动力学建模
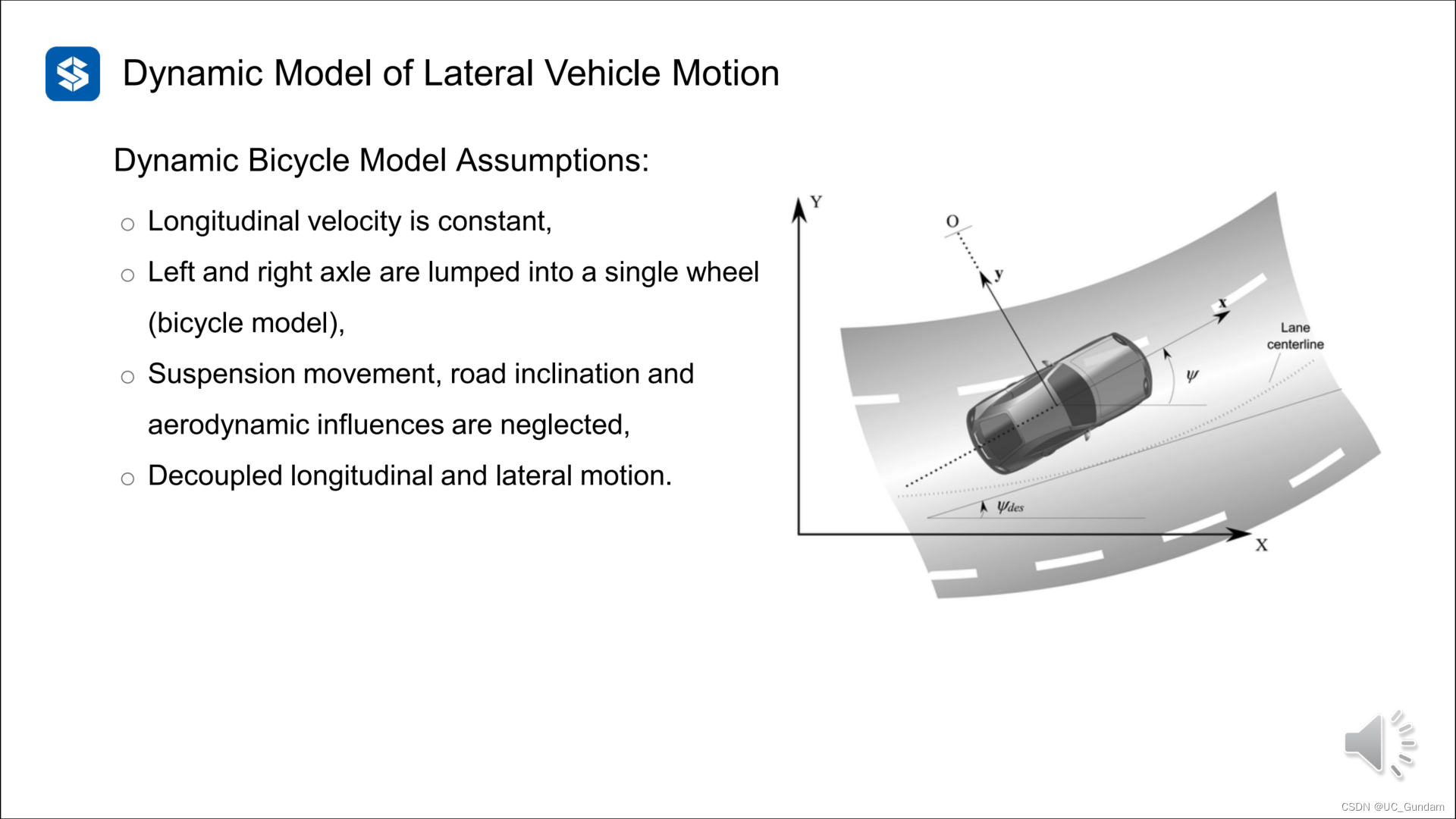
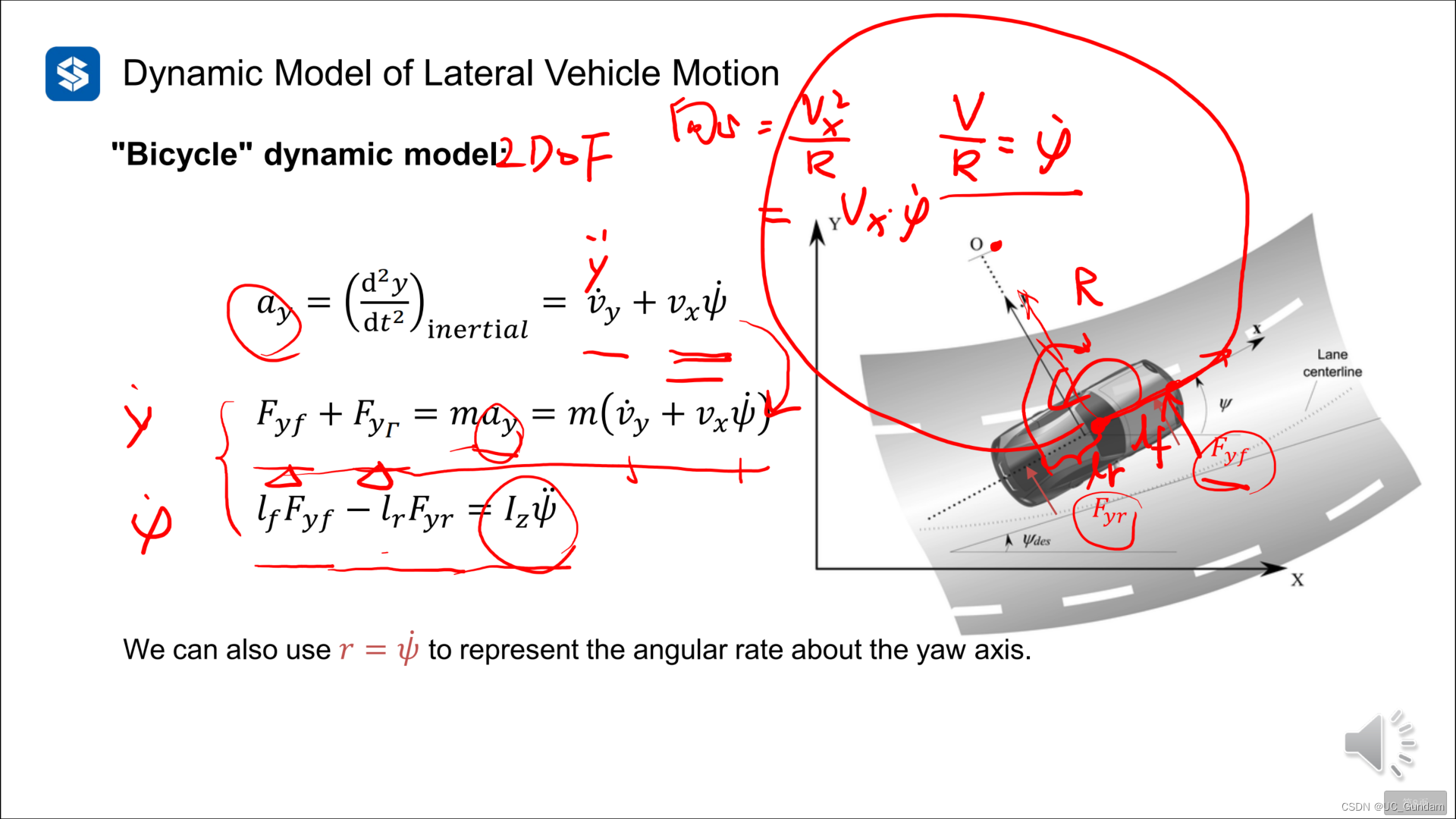
构建车辆横向运动方程、侧向受力(受力平衡)、横摆方程(力矩平衡)
二自由度模型
轮胎侧向力建系
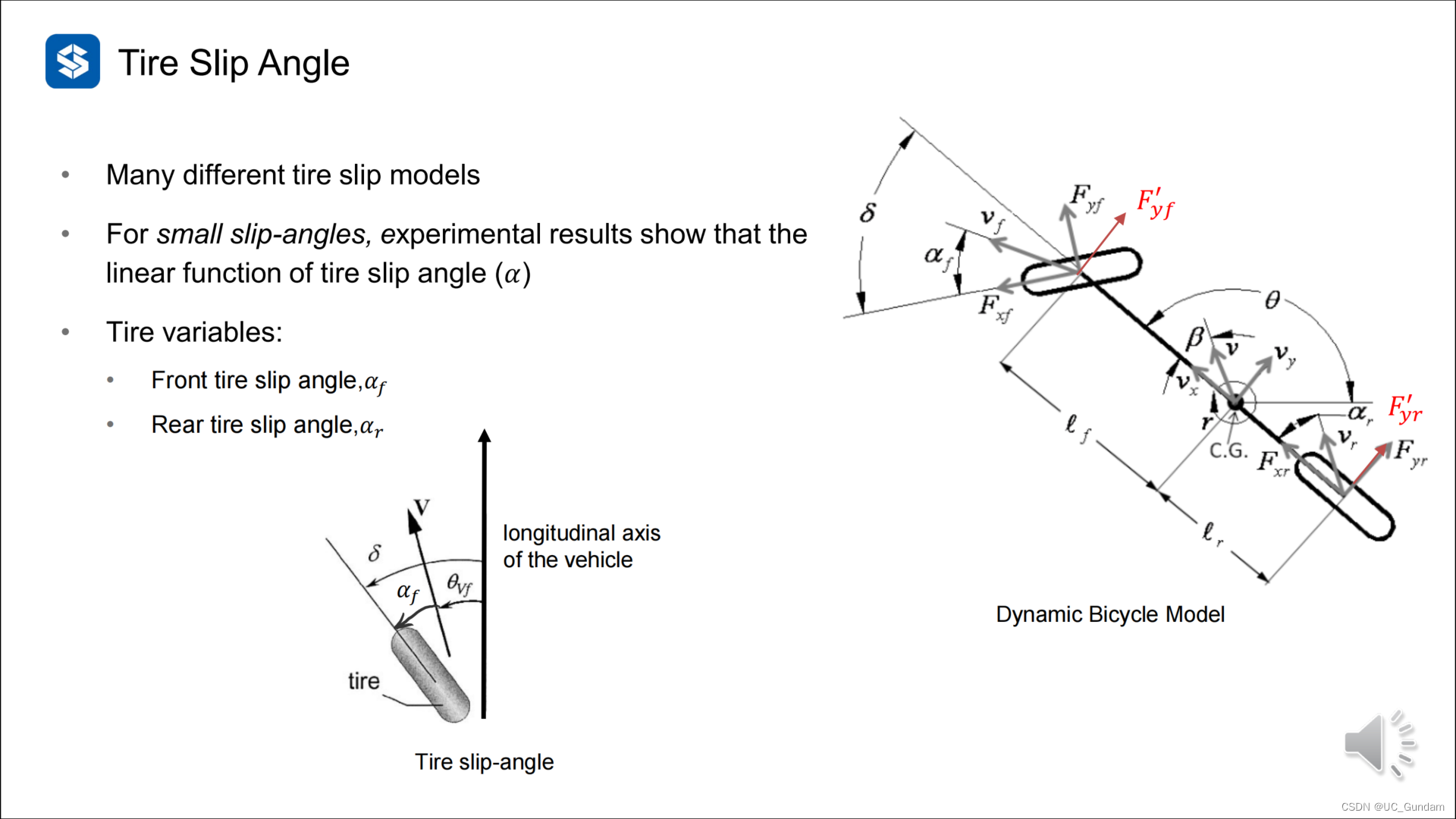
认为侧偏角和侧向力成线性关系,斜率为侧偏刚度
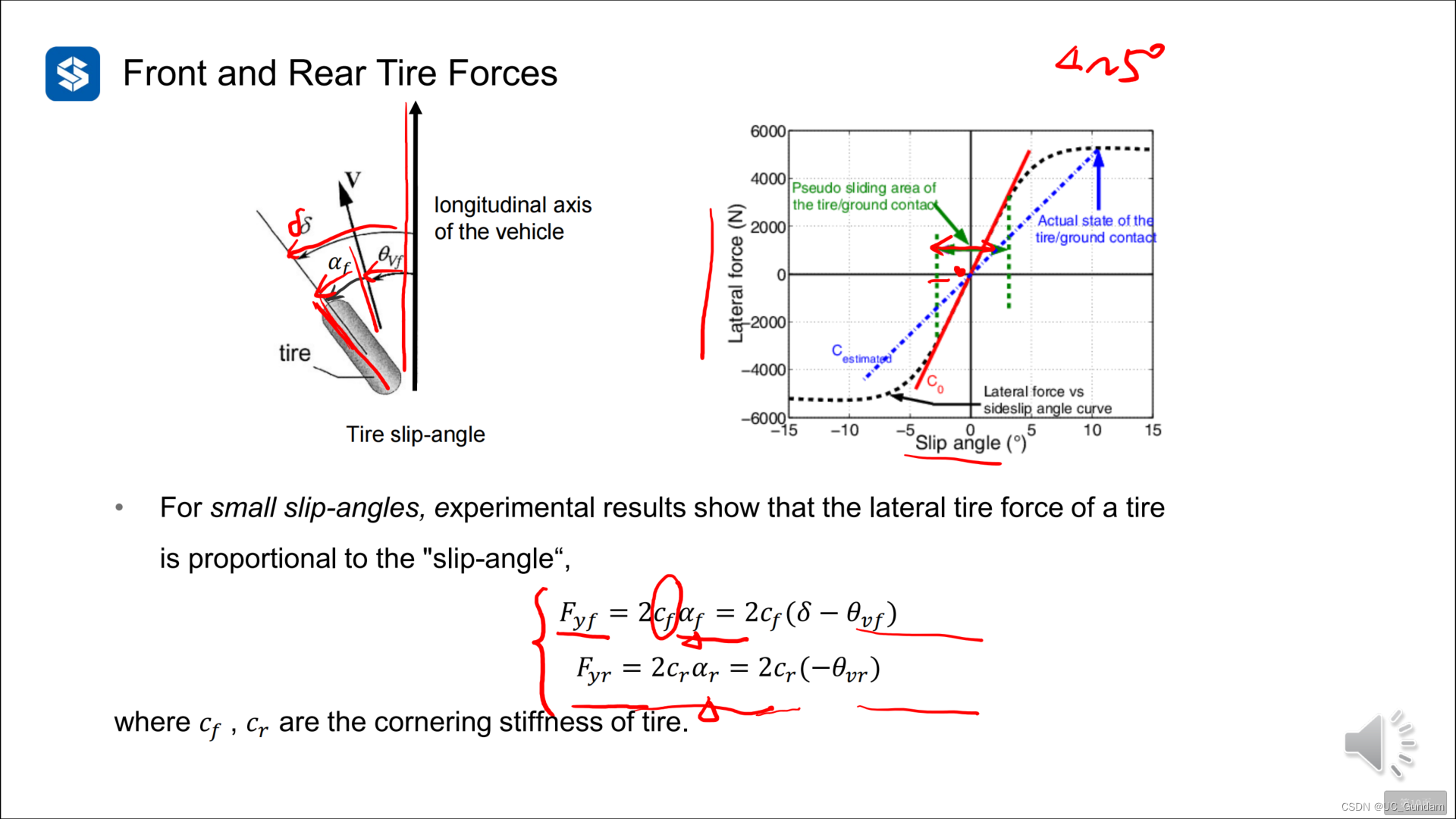
轮胎侧向力方程、以及车轮偏角的计算(根据车辆的横向速度和纵向速度进行计算)
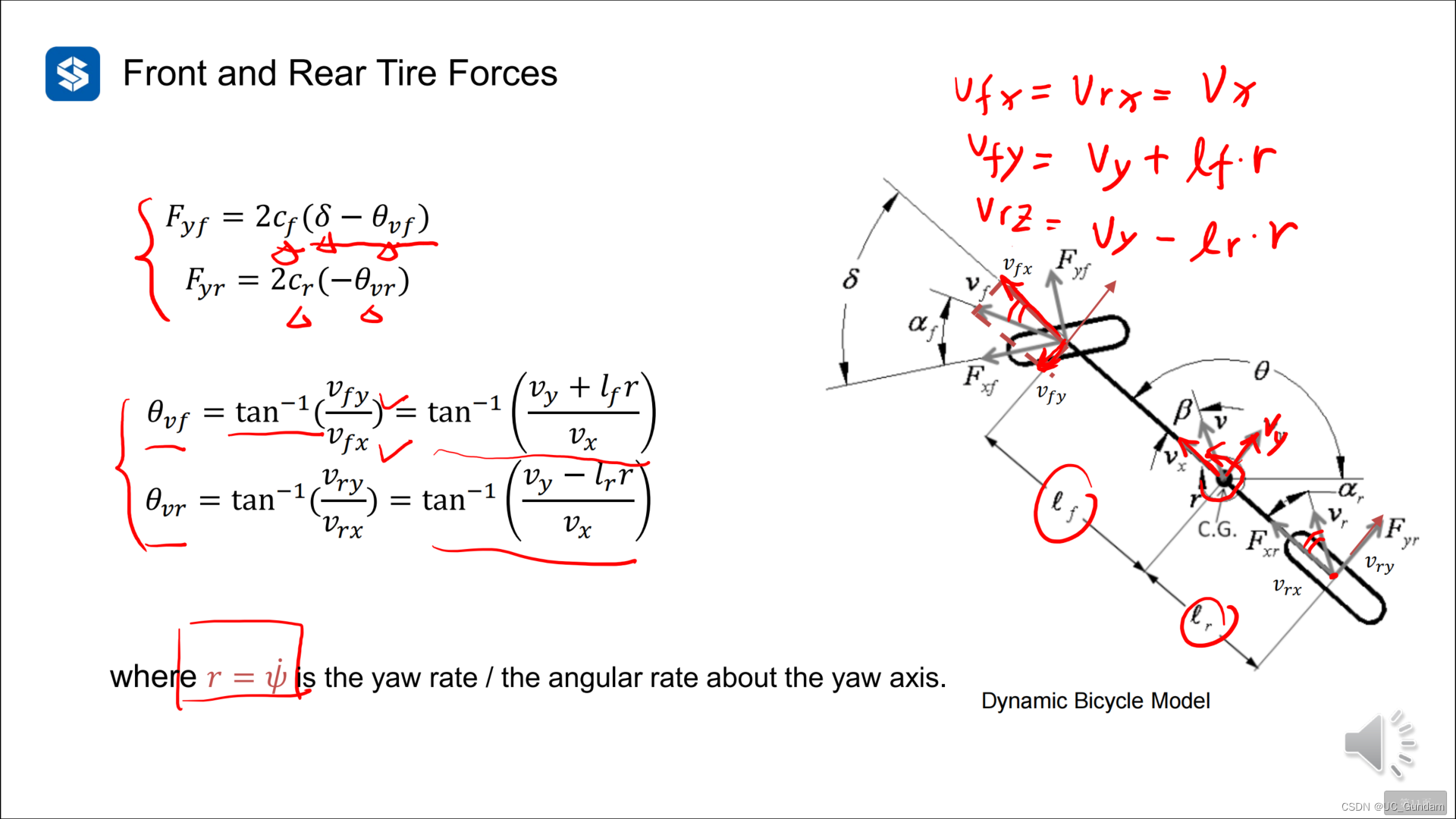
构建轮胎纵向力、横向力与车辆速度间的关系:
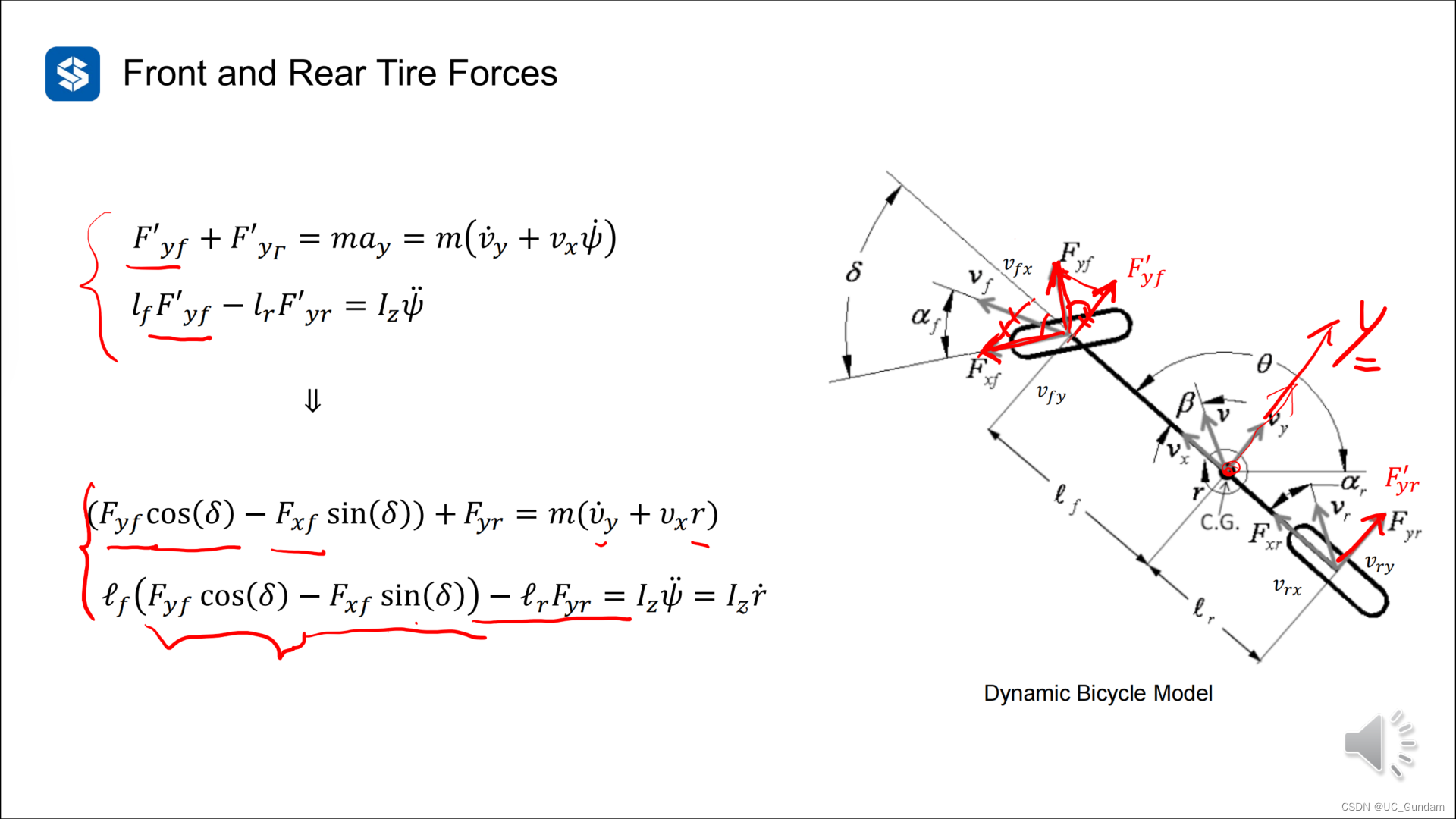
完成车辆侧向动力学的建模
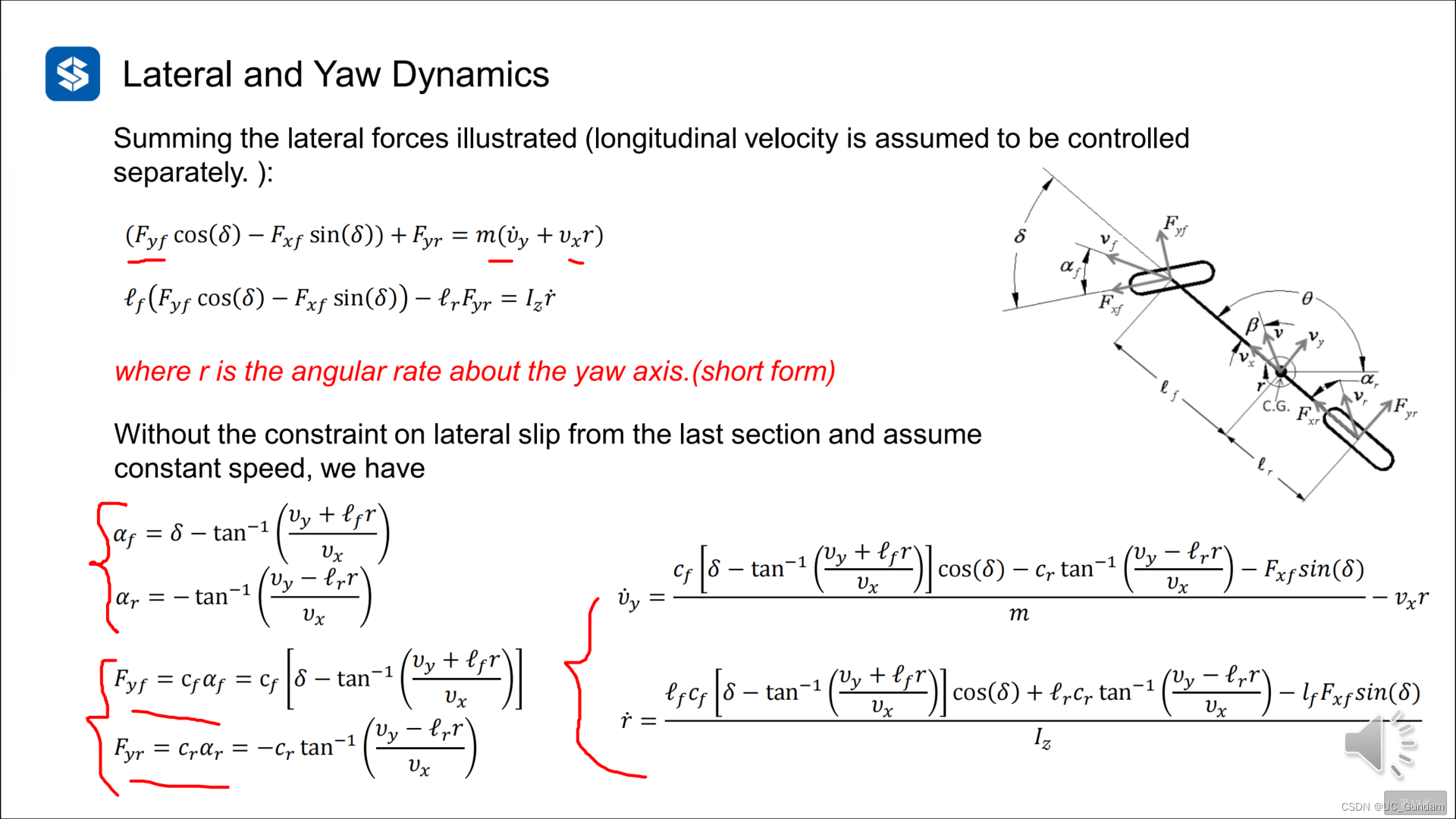
应用时,采取一定假设,简化模型:
单车模型、四轮模型(系数加个2)
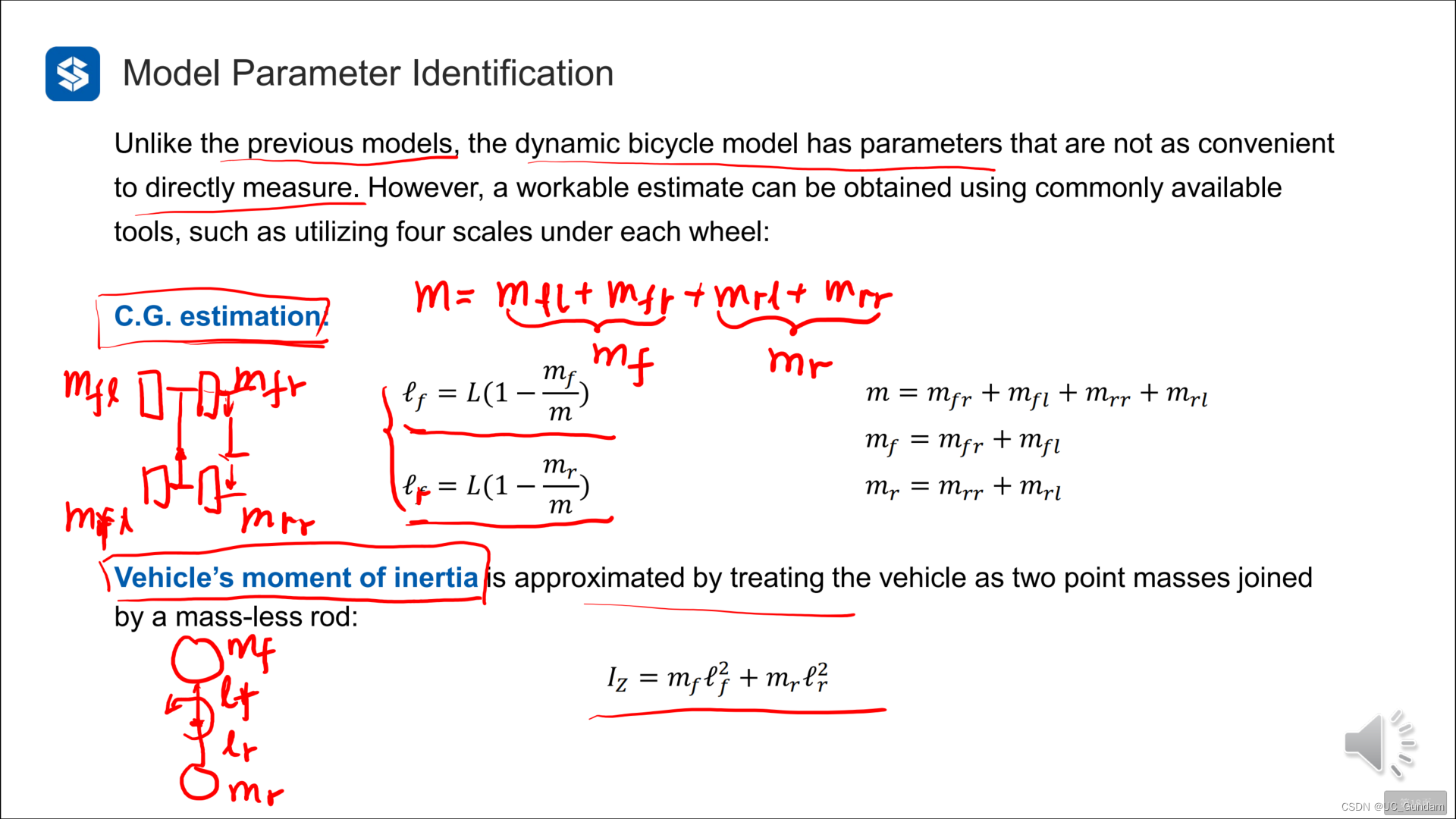
1.2重要的参数如何测量
(1)质心位置,四个轮子放四个称
(2)转动惯量,前轮后轮有质量,绕着质心旋转
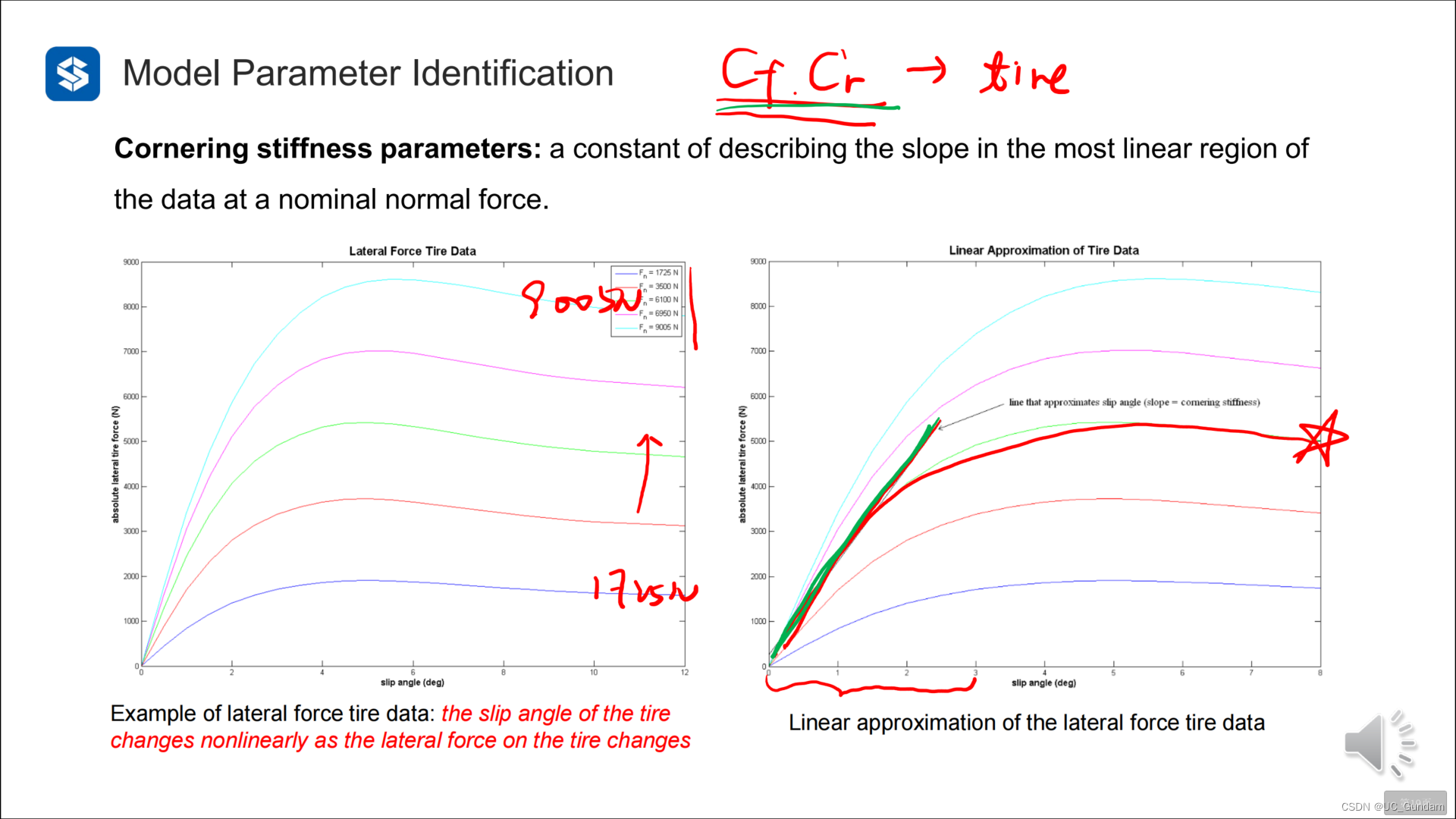
(3)轮胎参数,通过试验,观察侧向力与侧偏角之间的关系
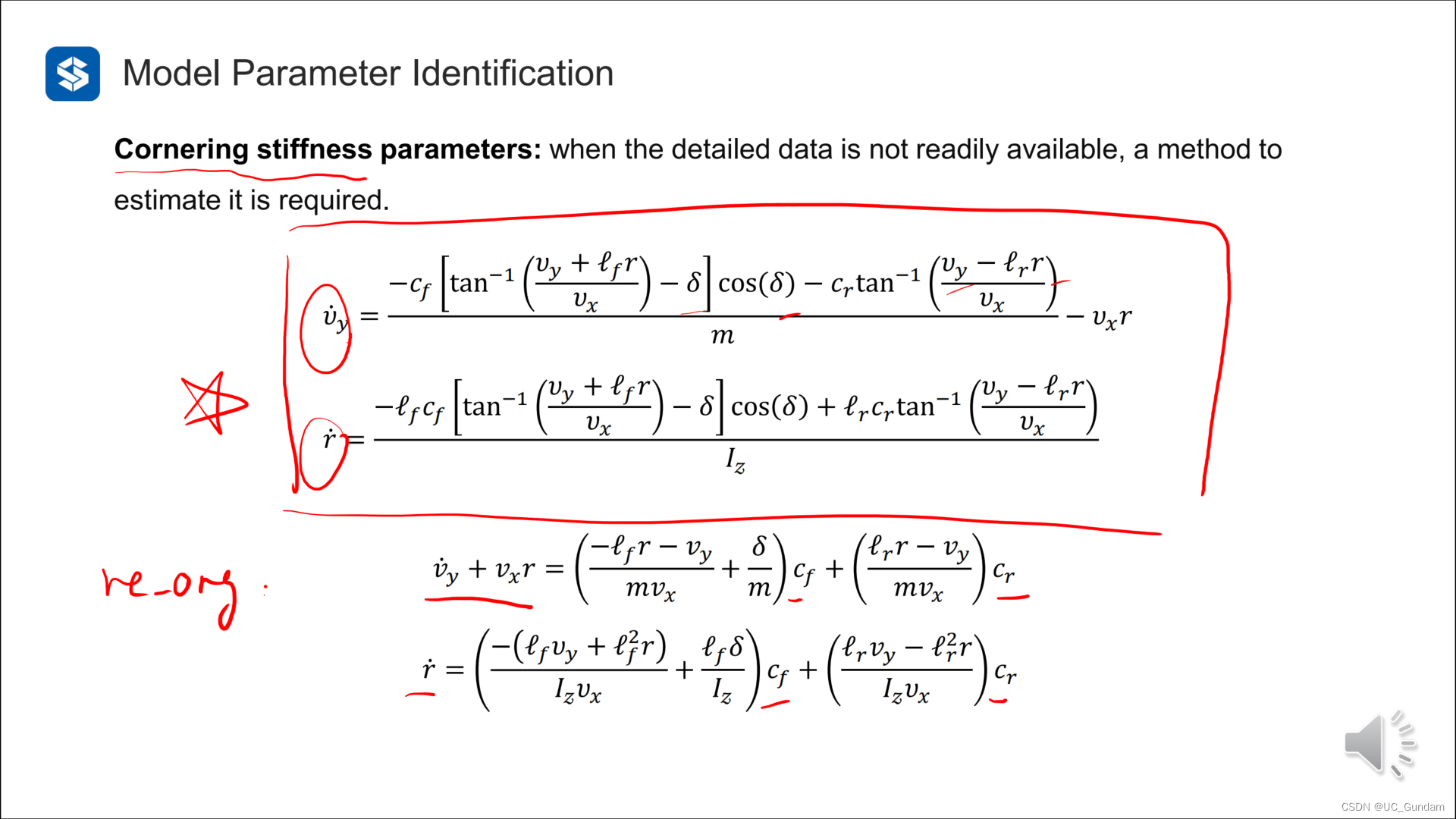
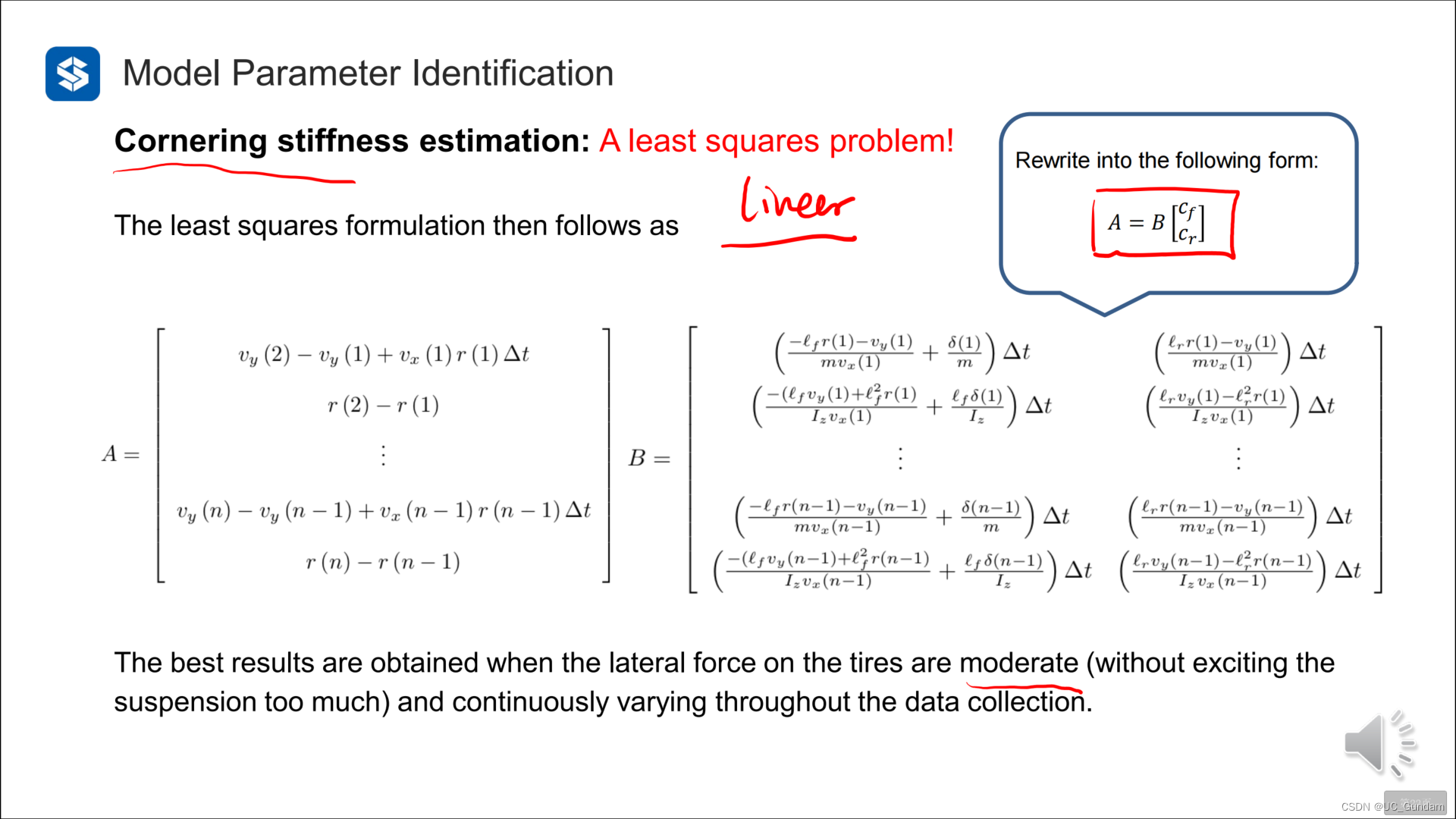
利用最小二乘法,计算更准确的侧偏刚度。
2 LQR算法

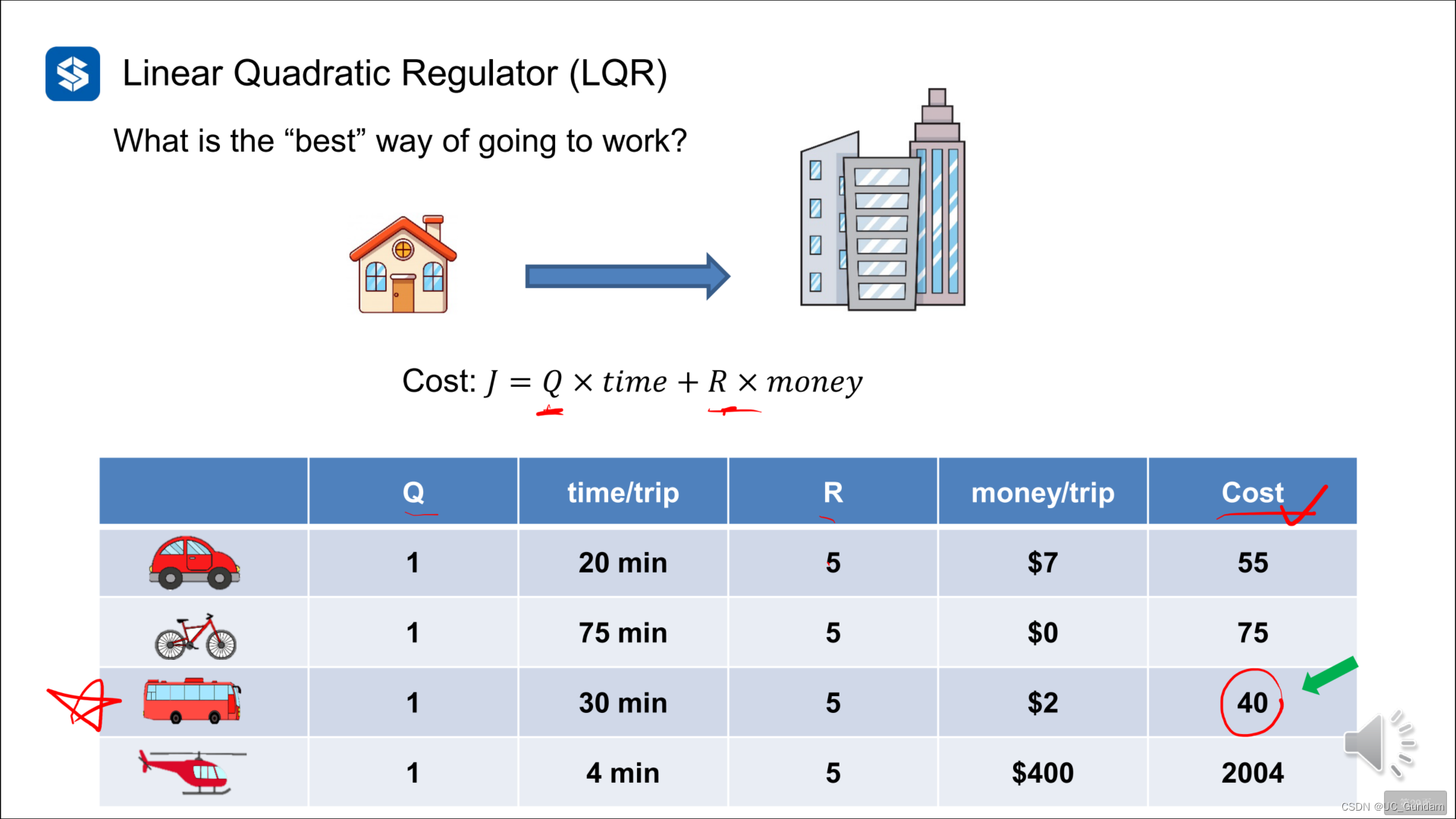
2.1日常生活中的例子
选择出行方式
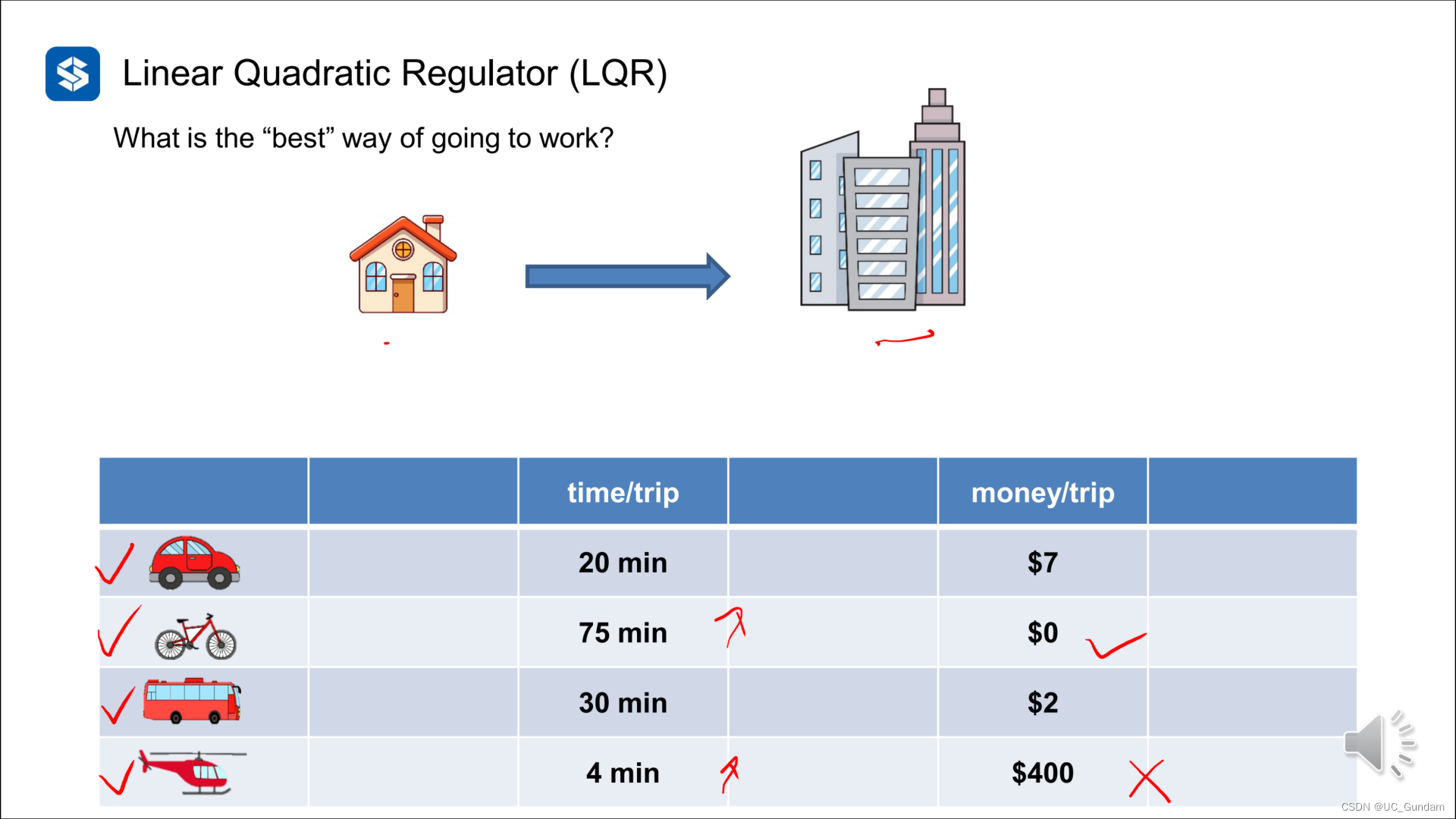
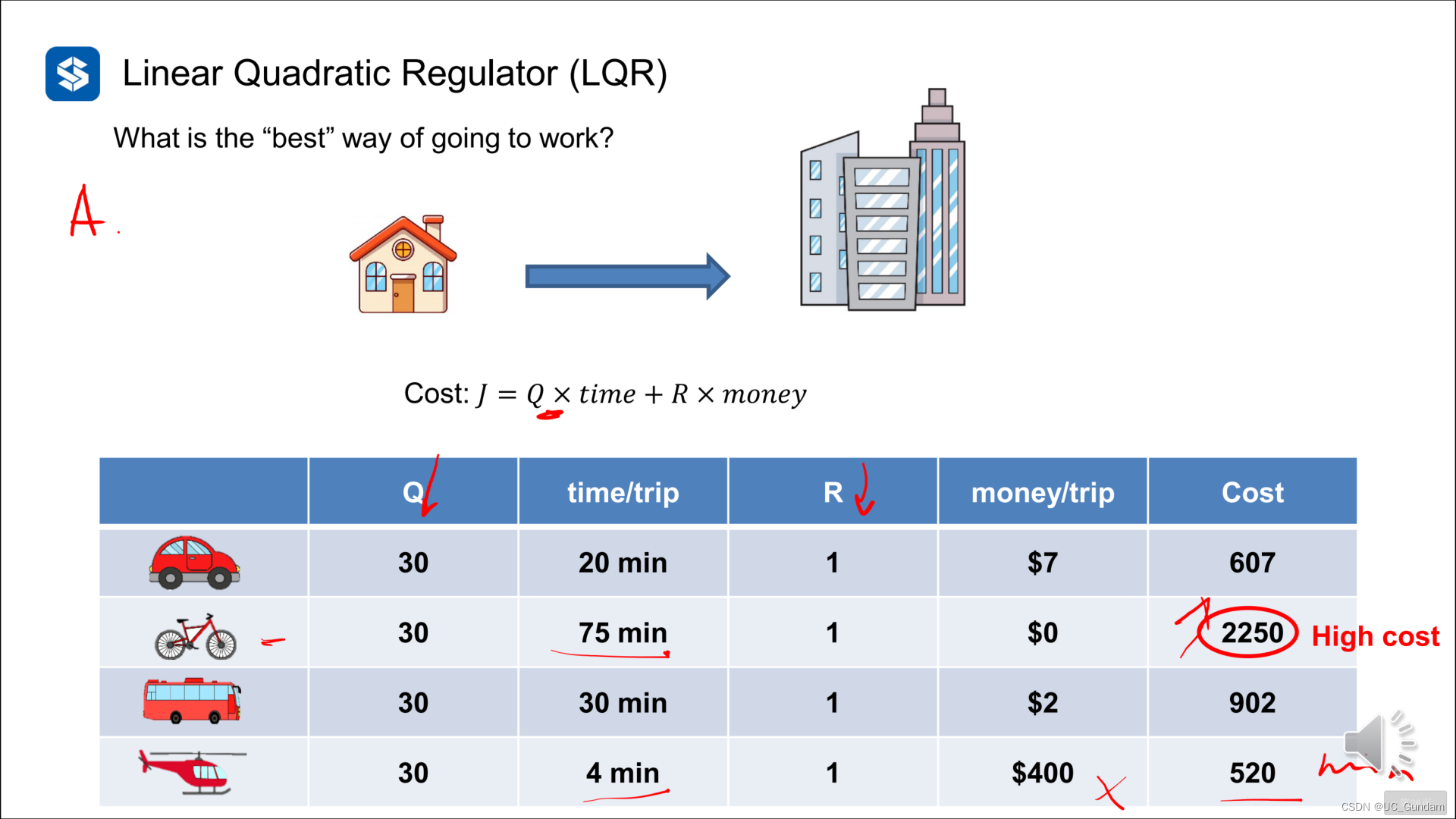
用权值量化选择

对A而言,时间很重要,时间权值很大
对B而言,钱最重要,钱权值最大
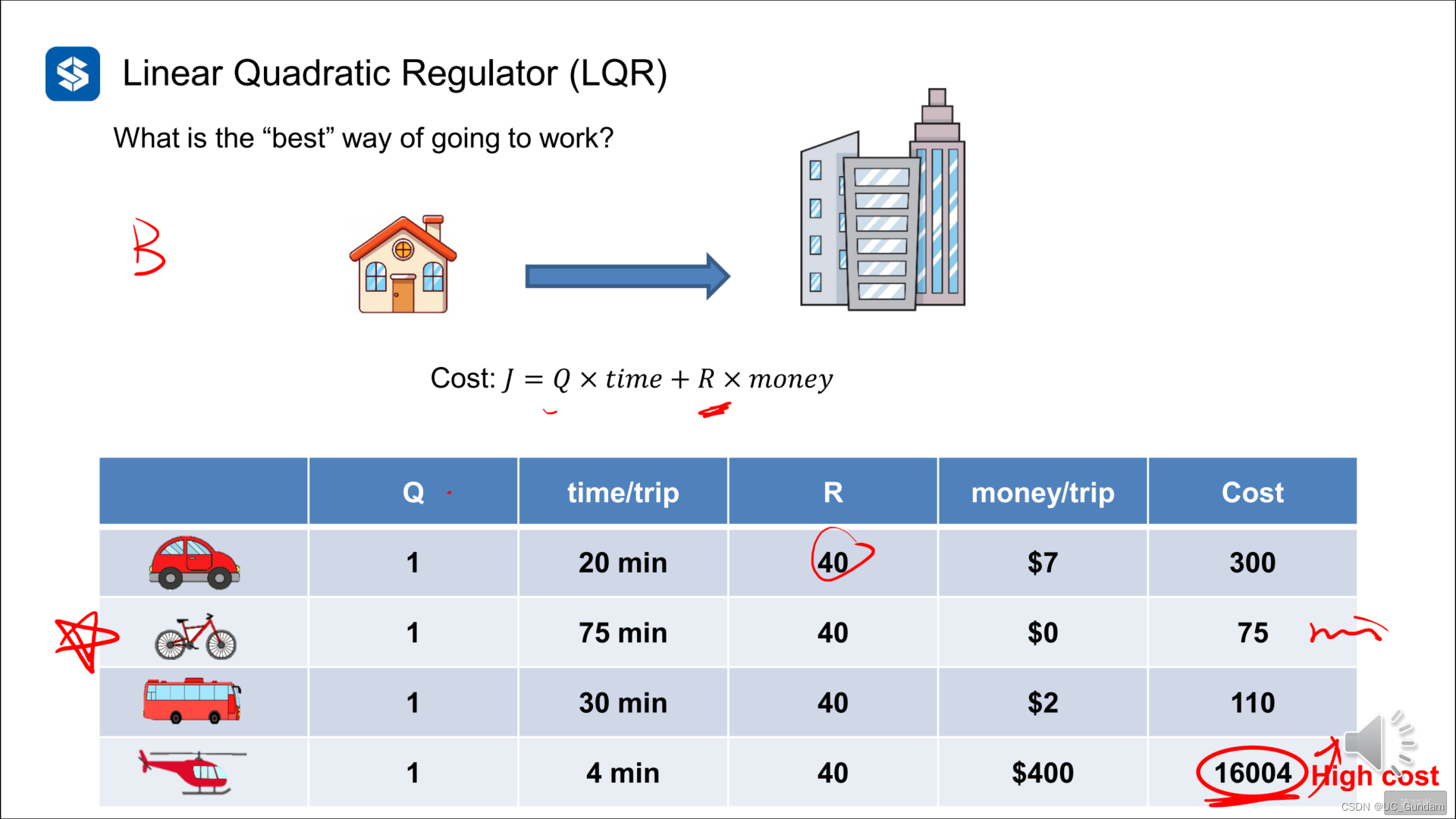
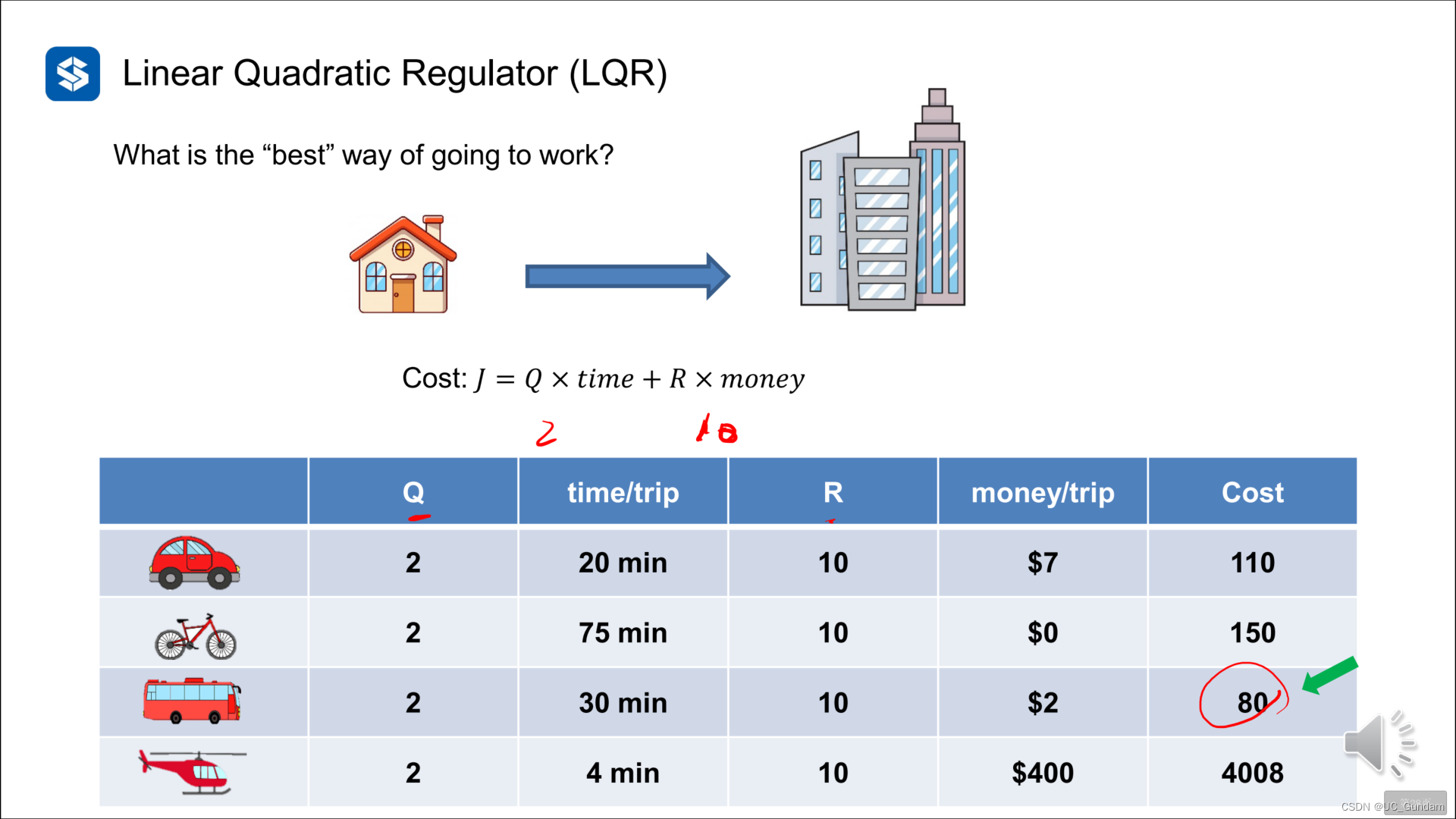
Q、R相对的值(比例)最重要,而不是绝对的值
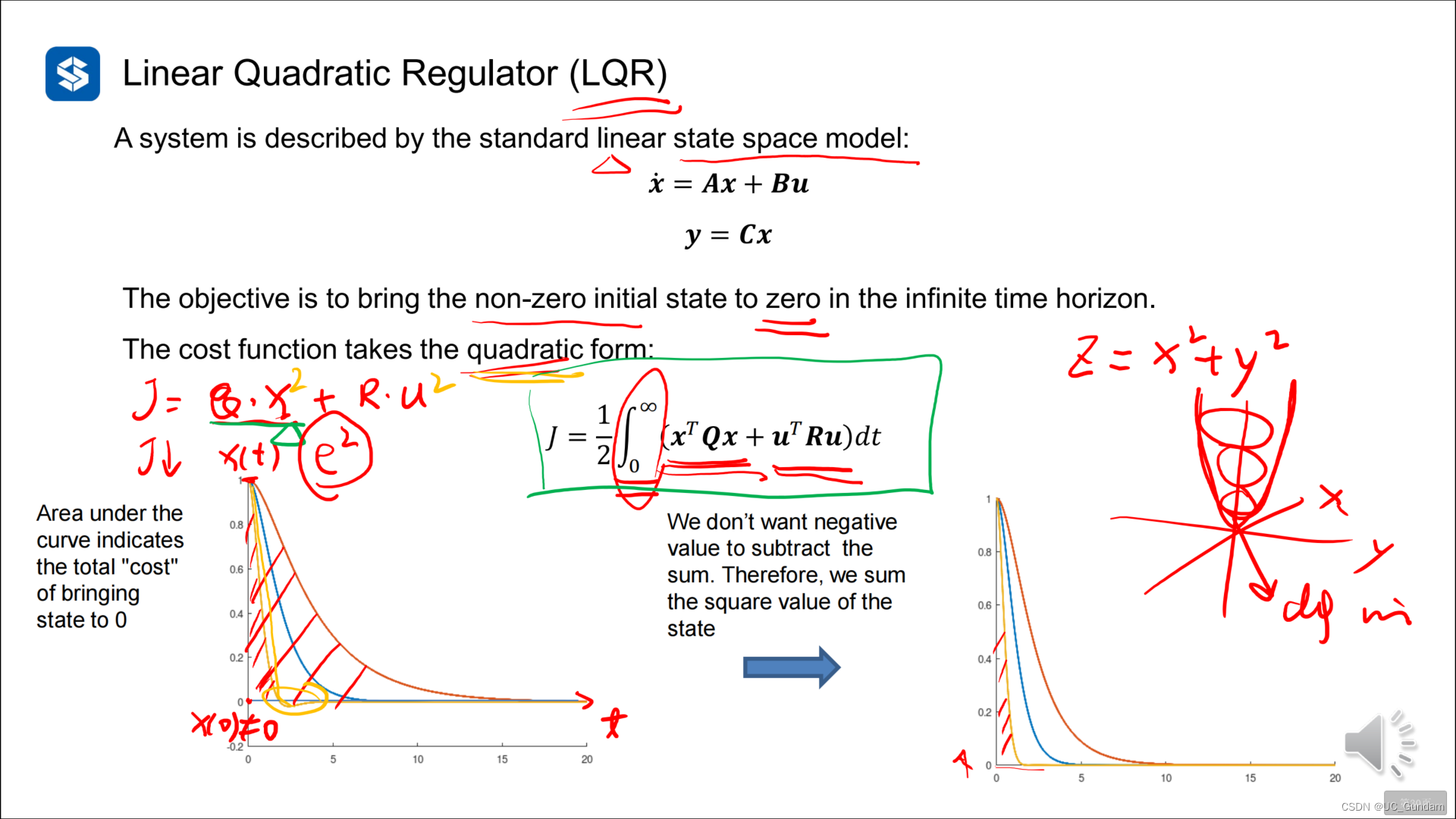
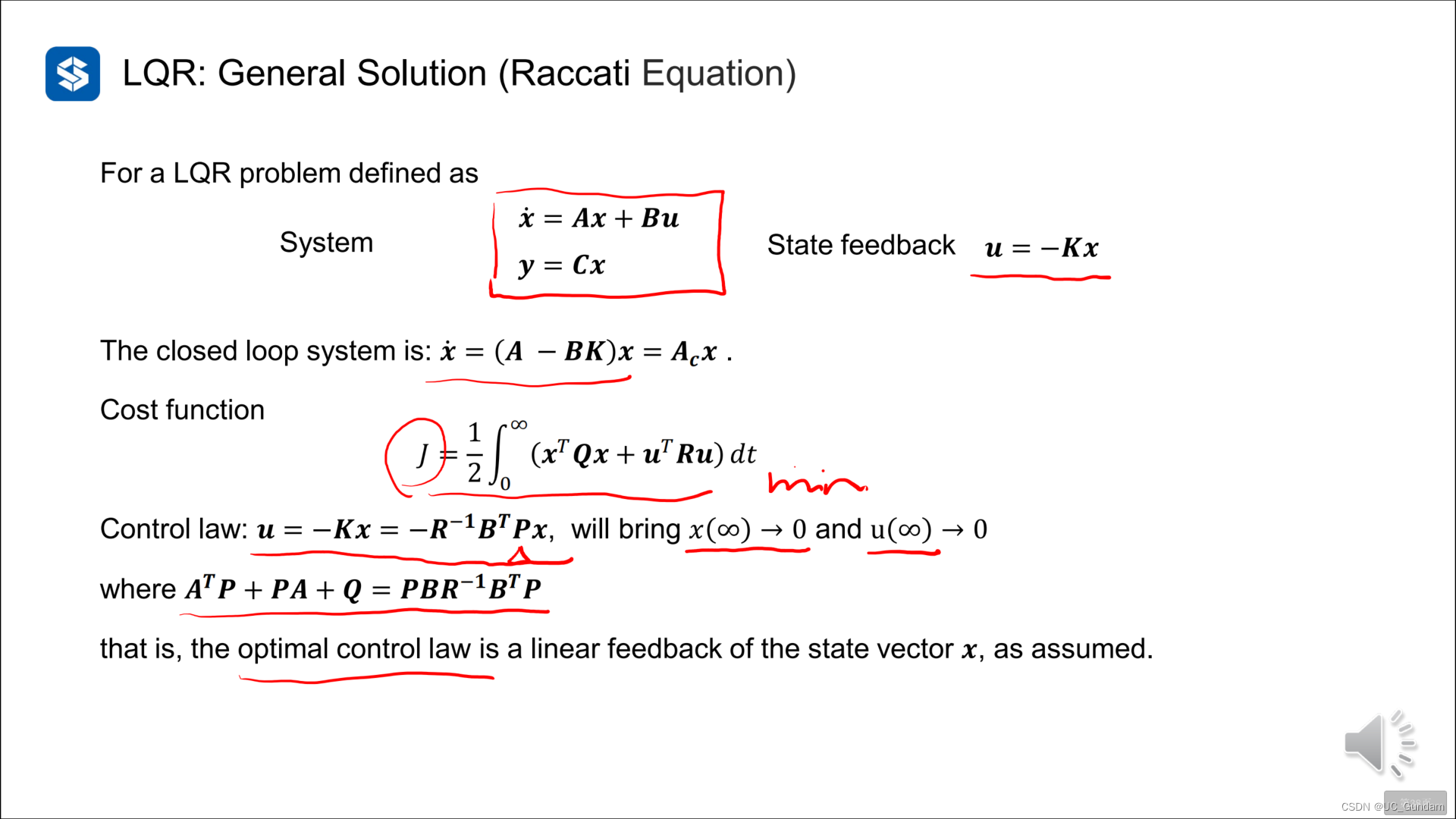
2.2用于控制系统
控制系统到达指定位置,并最小化代价函数
控制变量曲线面积大小表示代价,为了避免负值,用平方消除。同时,平方可以放大误差,加速收敛。
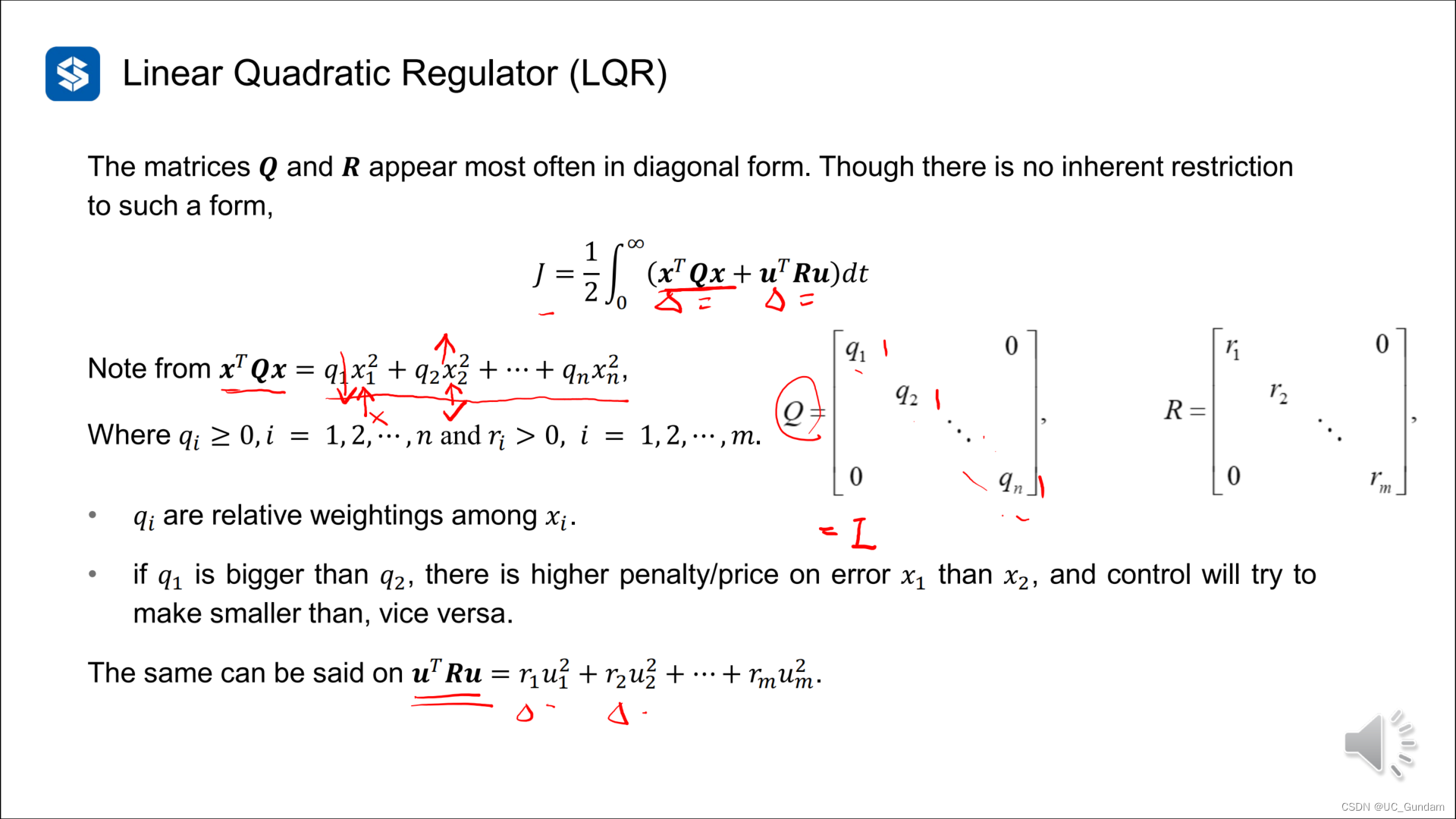
Q、R一般用对角阵的形式表述,表示控制参数和状态参数的权重大小。
2.2.1一维标量系统的例子
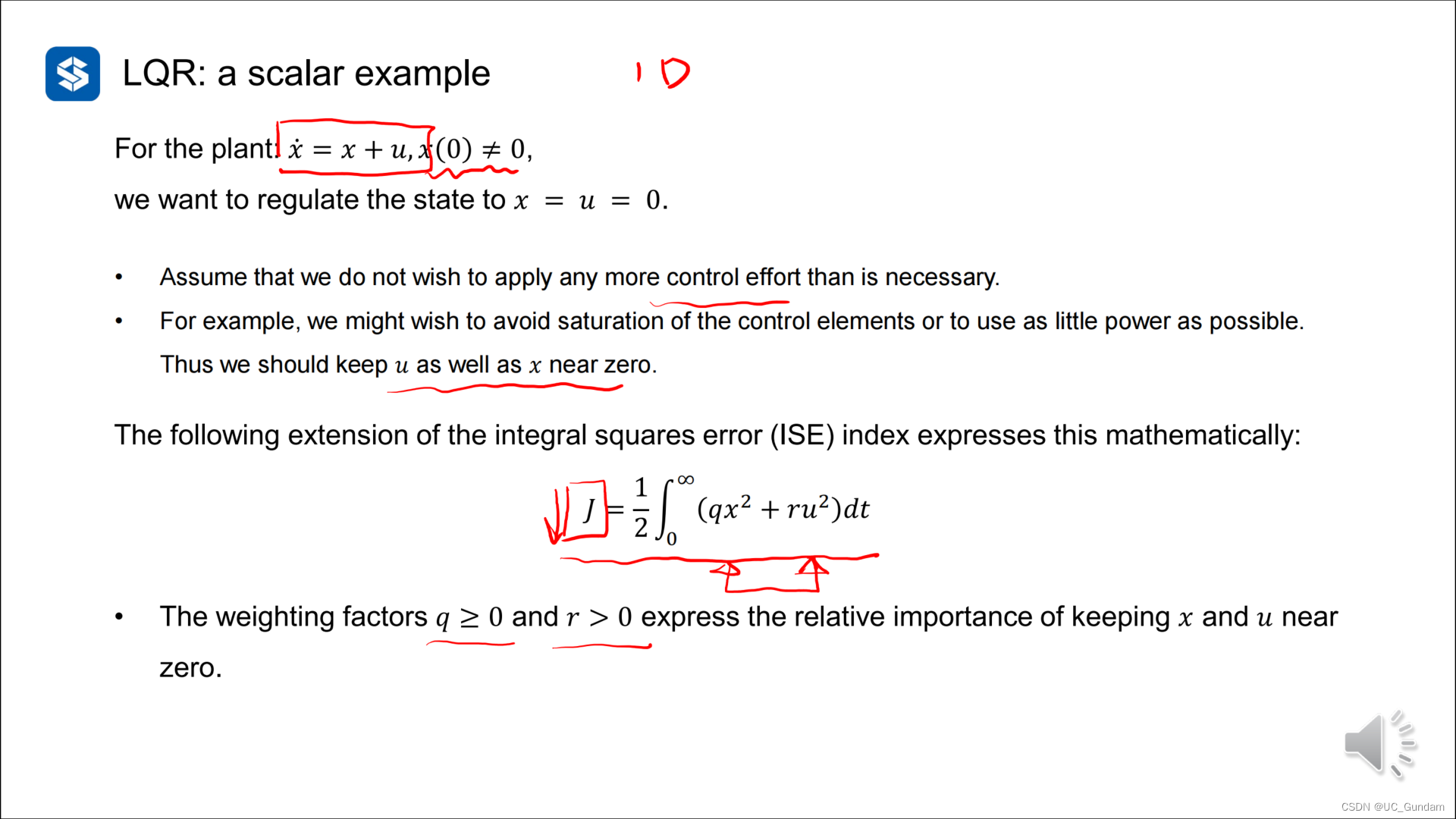
r为1,只考虑比值
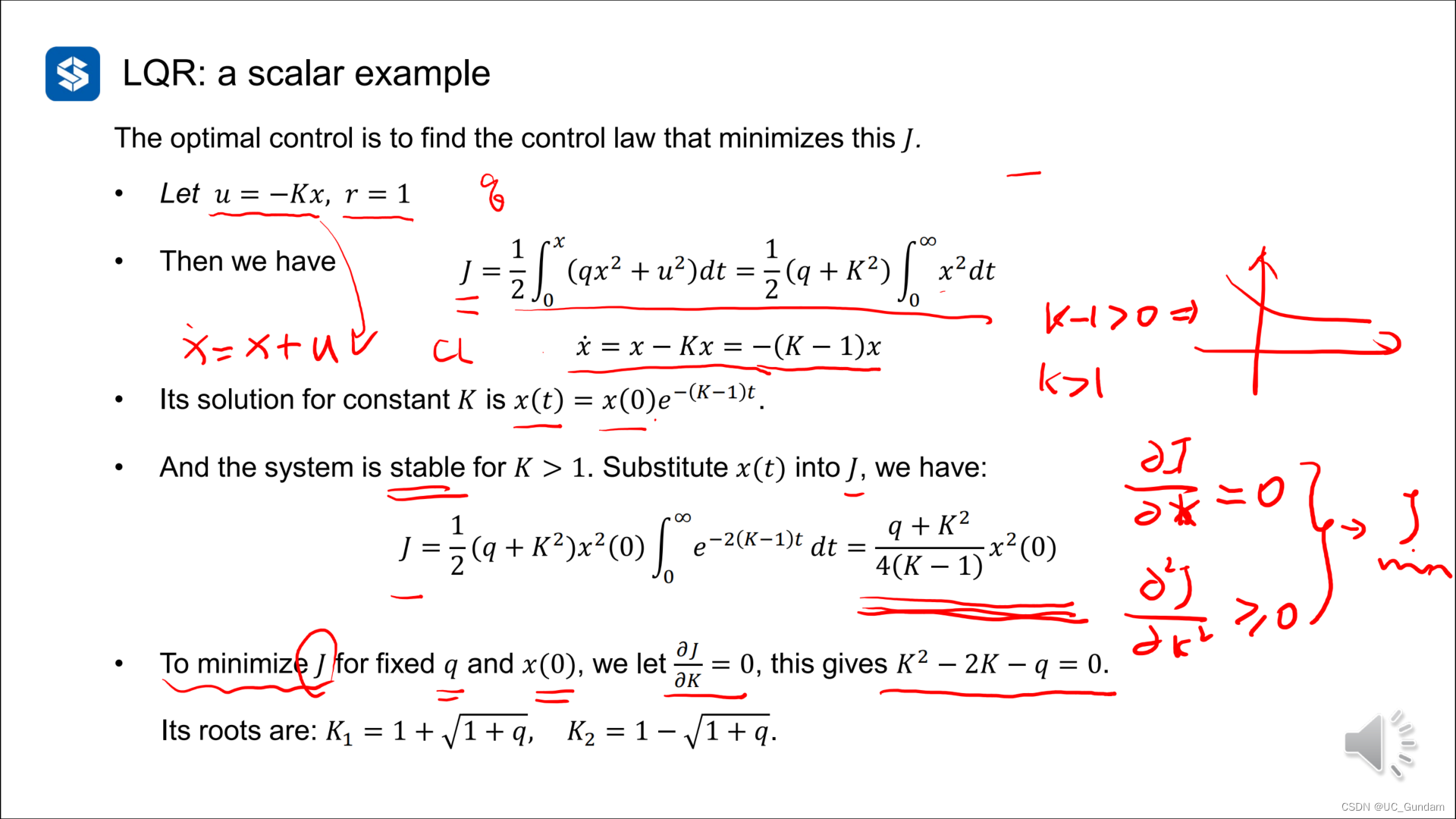
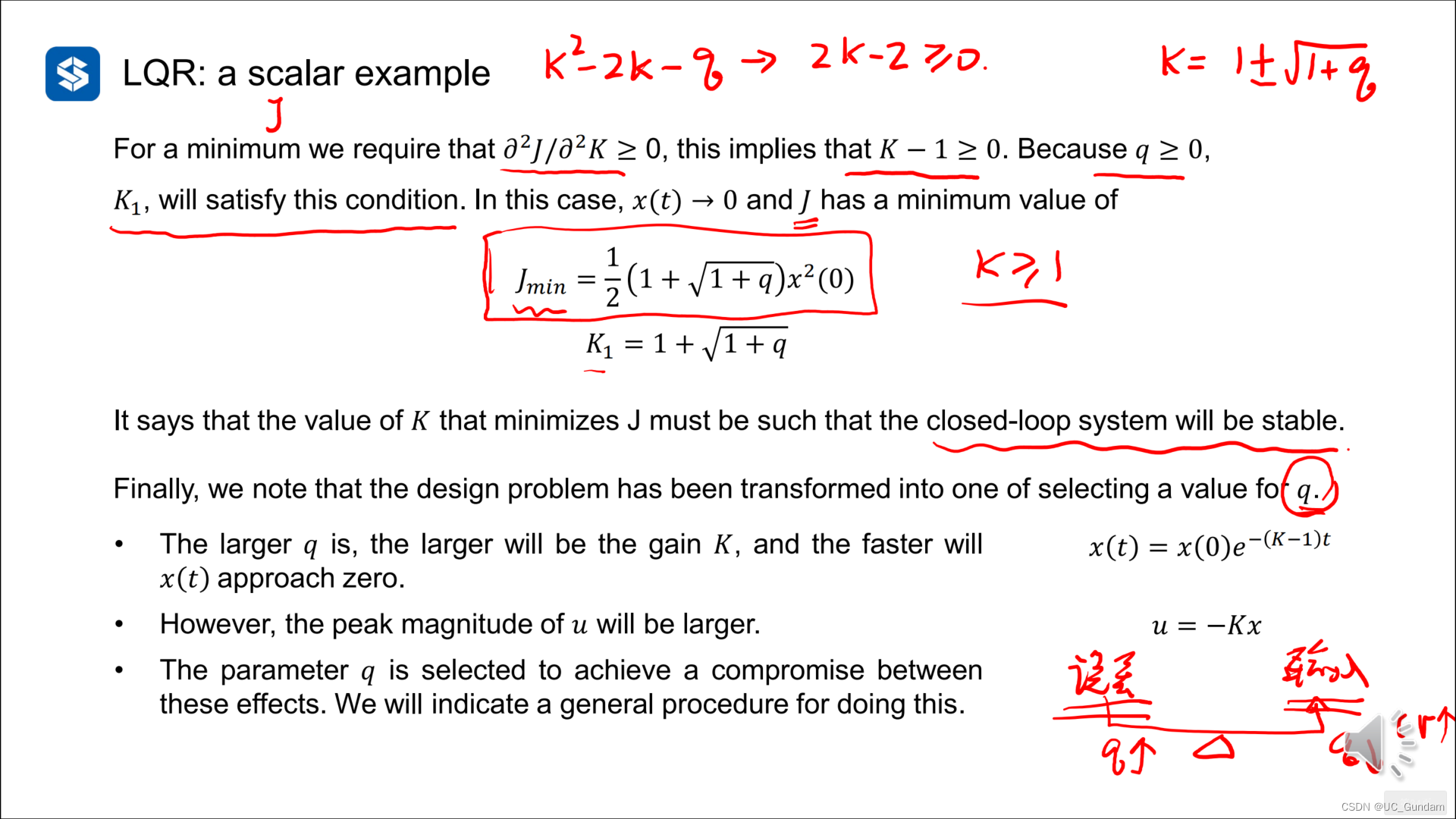
LQR的设计,就是选择Q值,在误差和输入之间做一个权衡。
2.2.2 n维系统的例子
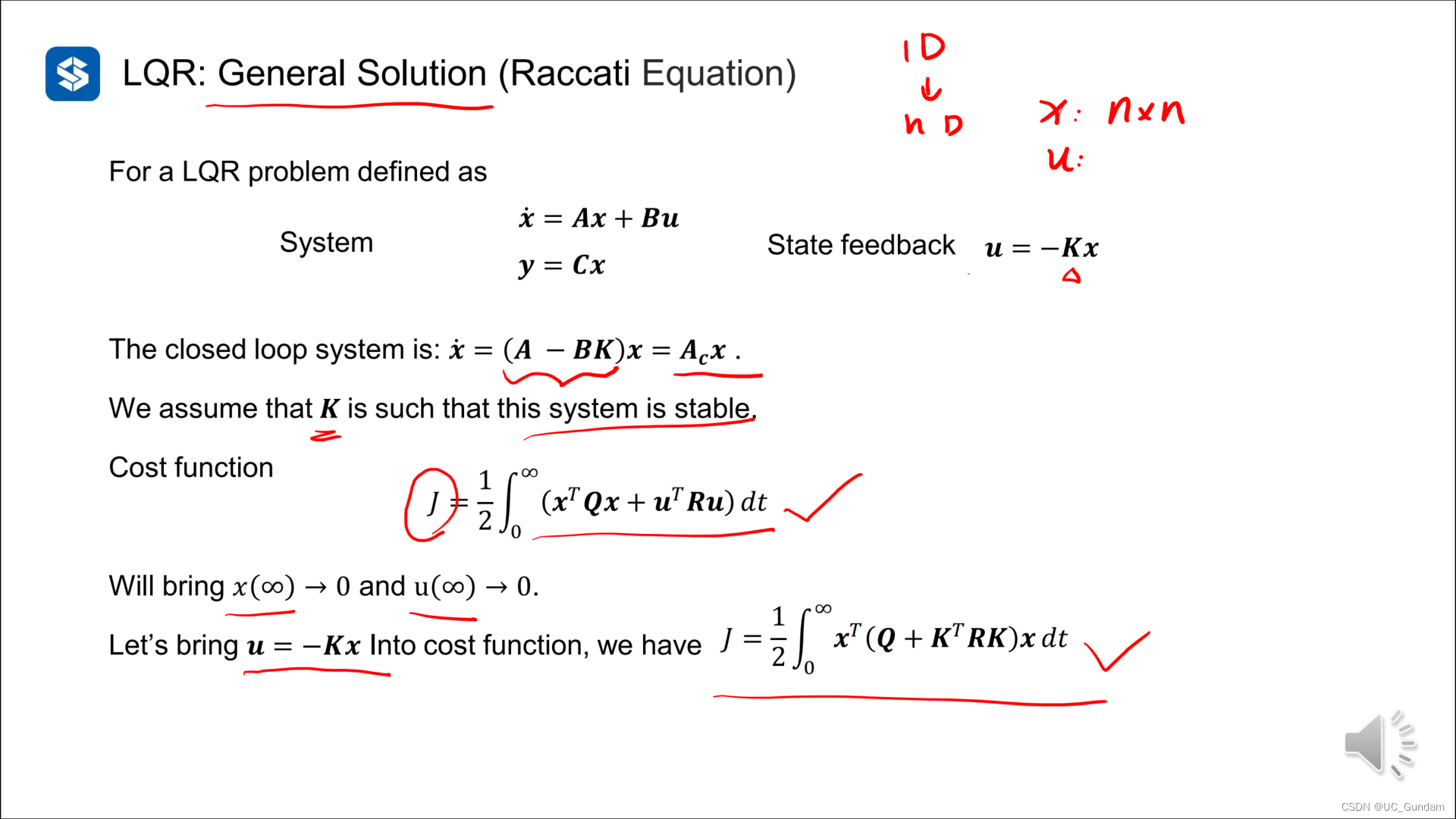
引入P矩阵,n×n对称矩阵
得出代价函数方程
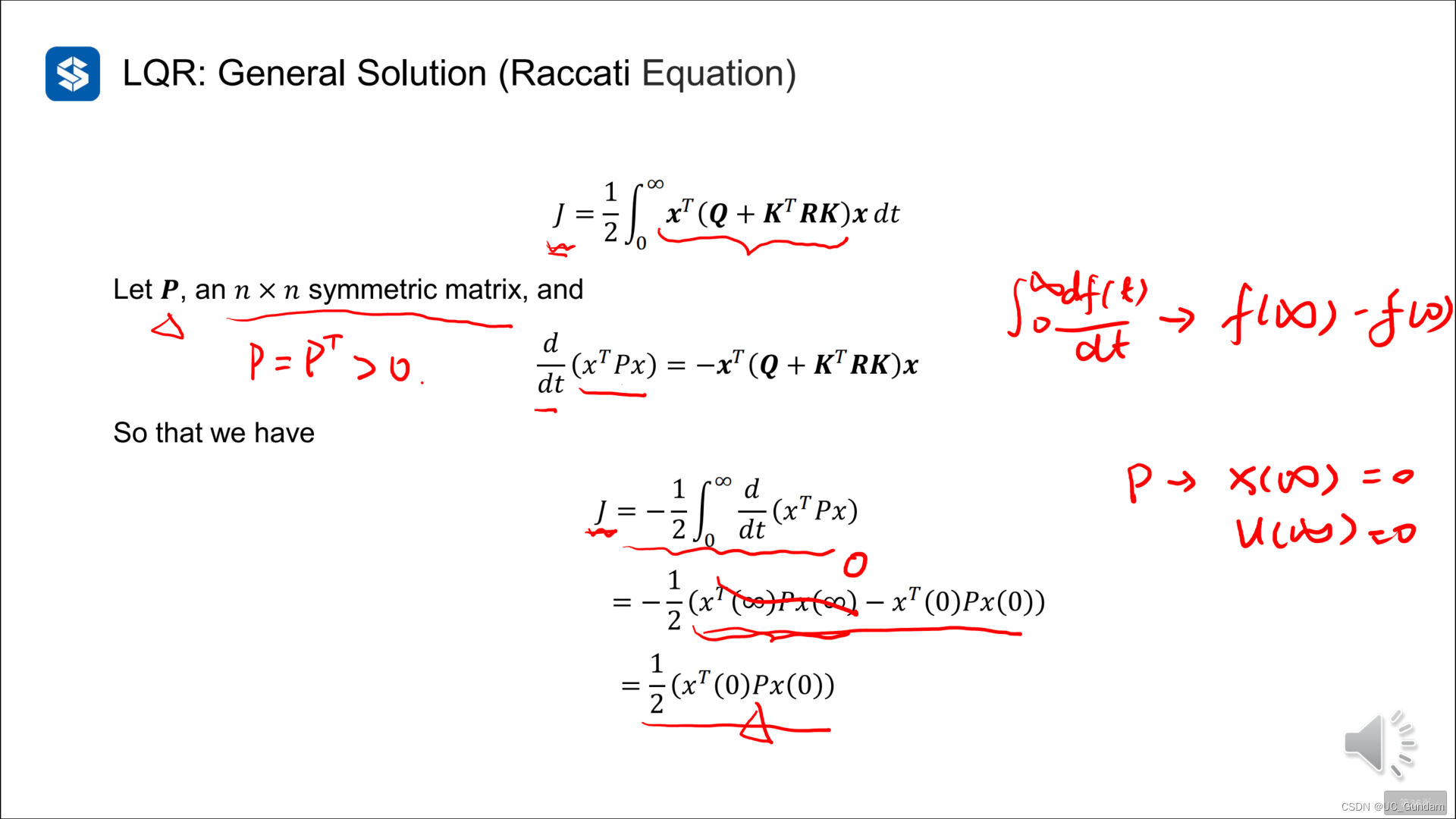
P的计算过程:消去K
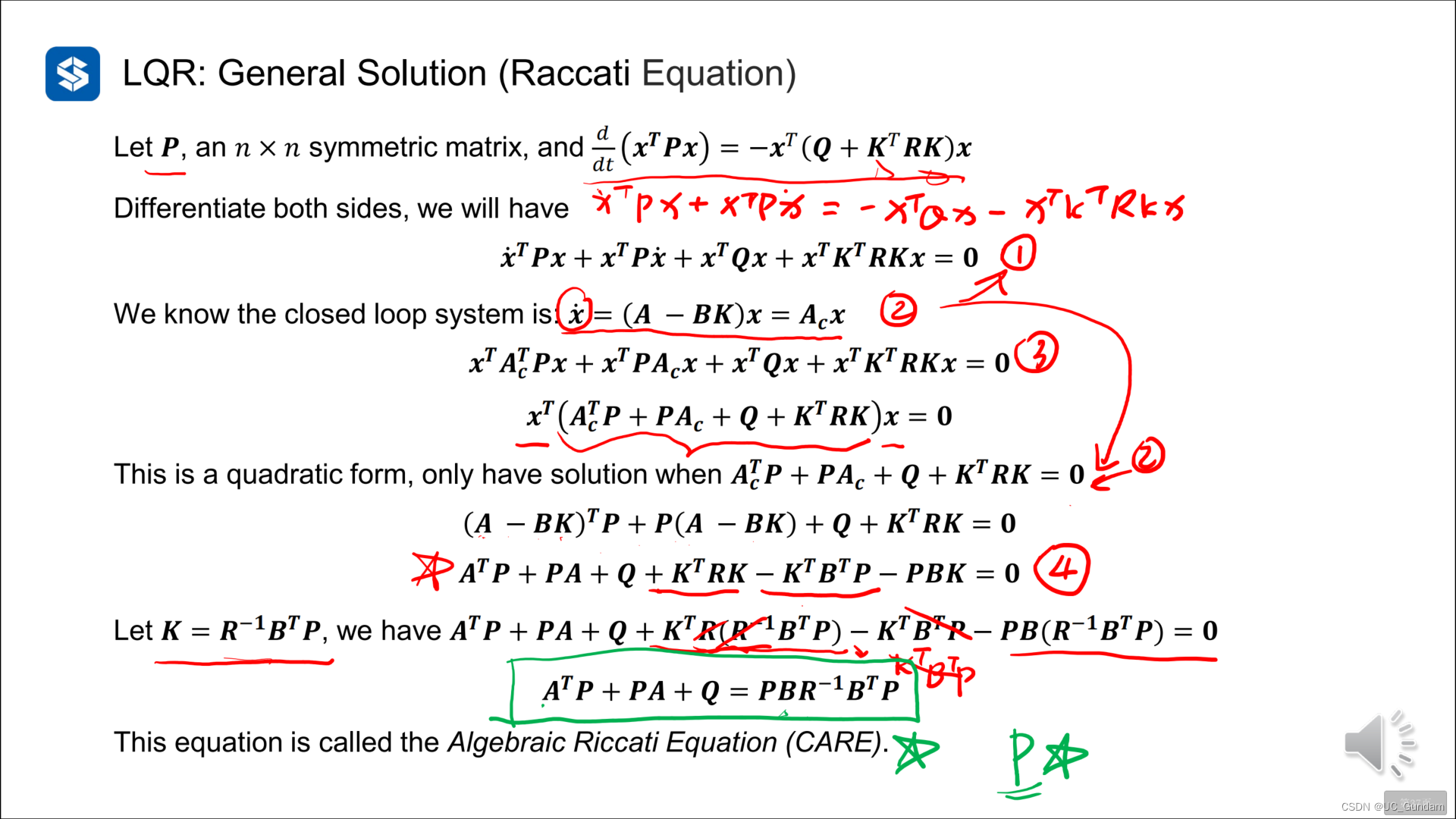
总结
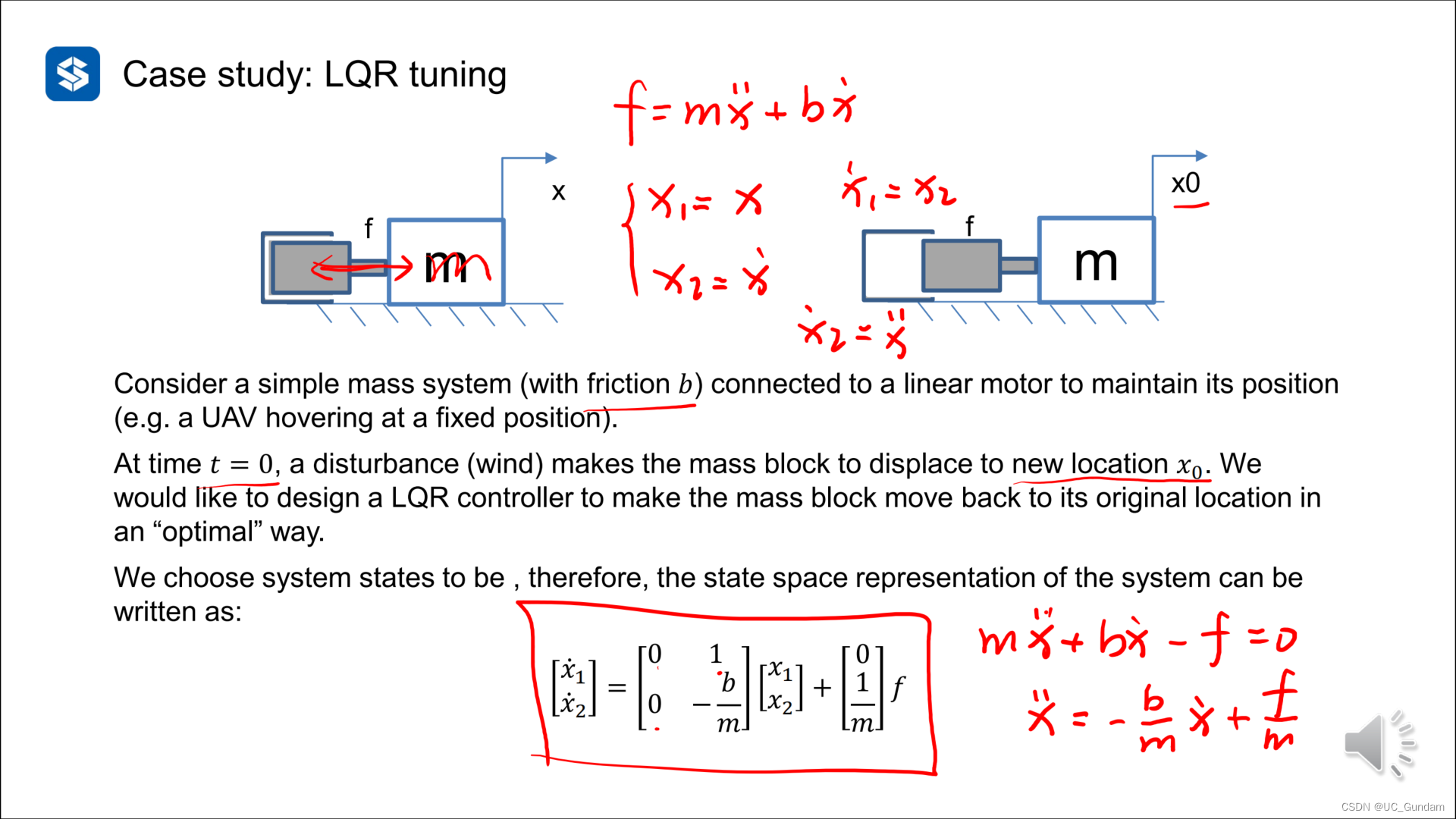
2.3 一个真实实例
一个质量块调节系统
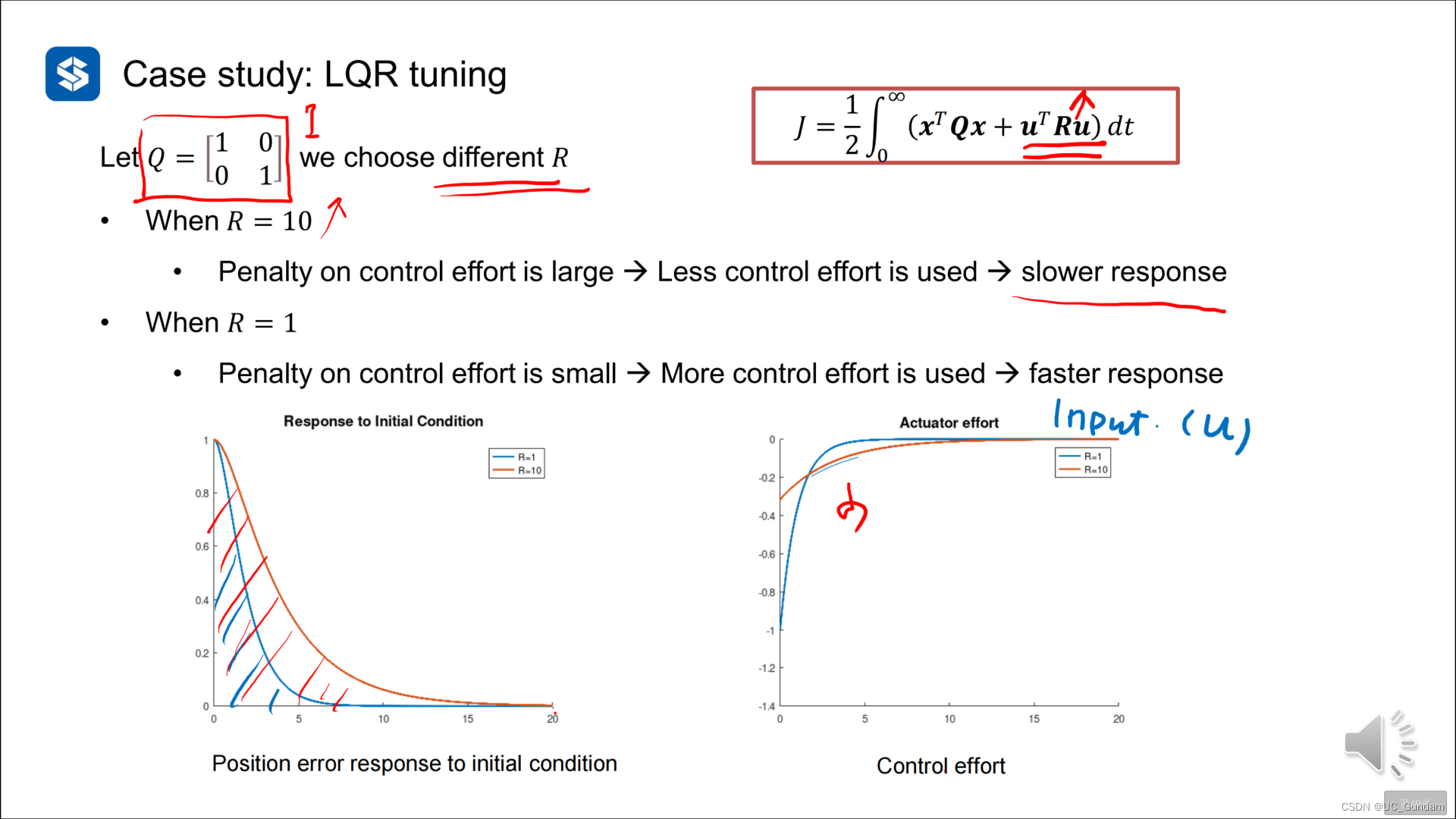
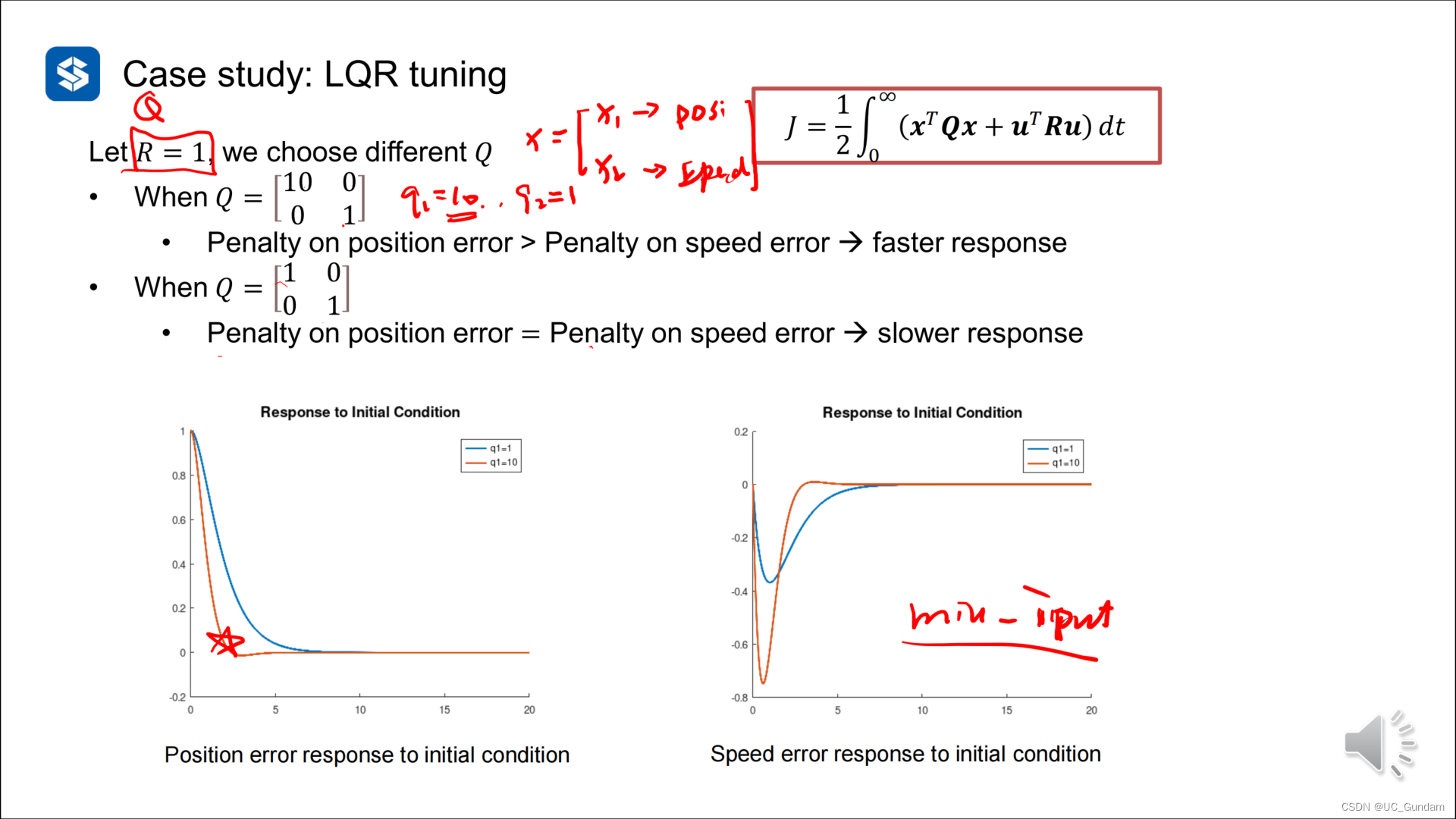
如果需要更快的控制效果,不管控制输入,会尽可能选大一点的Q值。
如果很在意控制器的输入消耗,则会优先优化R的值。



















 1136
1136

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











