







 自动控制系统是无人参与情况下,通过控制装置操纵被控对象以达成预设目标的设备。系统性能评价主要看稳定性(稳)、快速性(快)和准确性(准)。控制方式包括开环控制、按给定值操纵、按干扰补偿和闭环控制(反馈控制)。复合控制结合了开环和闭环的特点。Laplace变换在控制系统分析中起到关键作用。
自动控制系统是无人参与情况下,通过控制装置操纵被控对象以达成预设目标的设备。系统性能评价主要看稳定性(稳)、快速性(快)和准确性(准)。控制方式包括开环控制、按给定值操纵、按干扰补偿和闭环控制(反馈控制)。复合控制结合了开环和闭环的特点。Laplace变换在控制系统分析中起到关键作用。
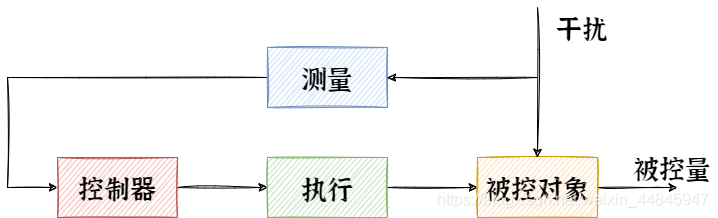
自动控制系统, 是指能够完成自动控制任务的设备; 而自动控制任务是指在没有人的参与下, 利用控制装置操纵被控对象, 使被控量等于给定值。 一个自控系统一般包括被控对象和控制器。
自动控制系统
有如下概念:
- 控制: 指利用 控制装置 来操纵 被控对象, 使 被控量 按指定的规律变化
- 控制装置: 产生控制信号的物理装置
- 被控对象: 在自动控制技术中, 把工作的机器设备称为被控对象
- 被控量: 把表征这些机器设备工作状态的物理量称为被控量
- 系统: 由互相关联的部件按一定的次序构成的结构, 能够提供预期的输出。
直观上来说, 所谓自动控制系统, 就是在没有人参与的情况下, 利用一定的方式让机器能按照我们想要的样子去运作。 而自动控制原理也就是研究自动控制系统的理论。
控制系统的性能要求
对于自动控制系统性能的评判, 讲究三个字: 快, 准, 稳。 以下面四个系统为例:

根据其单位阶跃响应可以看出, 系统2动态过程振荡的振幅和频率都比系统1大, 因此说它不如系统1 “稳” ; 对于系统3来说, 其动态过程持续时间比系统1要长, 所以说明它的快速性没有系统1好, 也就是不够 “快”; 系统4在稳定后与设定值1相差较大, 所以它不如其他3个系统 “准”。
具体表述如下:
- 稳: 系统的稳定性与平稳性;
- 快: 系统的快速性, 也就是动态过程持续时间长短;
- 准: 系统的静差, 也就是稳态误差。
控制的基本方式
一般来说, 自动控制可分为如下几种:
-
开环控制
-
按给定值操纵:

控制系统结构简单, 成本低, 但抗干扰能力差, 控制精度不高, 对偏差无修正能力。
-
按干扰补偿:
对于可测的干扰, 这种方式可以对干扰进行全补偿, 但对于不可测的干扰以及系统内部参数的变化就无能为力。
-
-
按偏差调节的闭环控制 (闭环控制或反馈控制)

这种控制方式控制精度较高, 因为无论是干扰的作用, 还是系统结构参数的变化, 只要被控量偏离给定值, 系统就会自动纠偏
-
复合控制
-
按输入作用补偿:

-
按扰动作用补偿:

复合控制其实就是开环和闭环的结合。
-
相关数学知识
Laplace 变换:
L
[
d
k
f
(
t
)
d
t
k
]
=
s
k
F
(
s
)
−
s
k
−
1
f
(
0
)
−
⋯
−
f
(
k
−
1
)
(
0
)
L
[
∫
0
t
f
(
t
)
d
t
]
=
1
s
F
(
s
)
L
[
1
t
f
(
t
)
]
=
∫
s
∞
F
(
σ
)
d
σ
L
[
t
n
f
(
t
)
]
=
(
−
1
)
n
F
(
n
)
(
s
)
L
[
f
(
a
t
)
]
=
1
a
F
(
s
a
)
L
[
e
s
t
f
(
t
)
]
=
F
(
s
−
a
)
L
[
f
(
t
−
a
)
u
(
t
−
a
)
]
=
e
−
a
s
F
(
s
)
\begin{aligned} &\mathscr{L}[\frac{\text d^kf(t)}{\text dt^k}]=s^kF(s)-s^{k-1}f(0)-\dots-f^{(k-1)}(0)\\ &\mathscr{L}[\int^t_0f(t)\text dt]=\frac{1}{s}F(s)\\ &\mathscr{L}[\frac{1}{t}f(t)]=\int^\infty_sF(\sigma)\text d\sigma\\ &\mathscr{L}[t^nf(t)]=(-1)^nF^{(n)}(s)\\ &\mathscr{L}[f(at)]=\frac{1}{a}F(\frac{s}{a})\\ &\mathscr{L}[e^{st}f(t)]=F(s-a)\\ &\mathscr{L}[f(t-a)u(t-a)]=e^{-as}F(s) \end{aligned}
L[dtkdkf(t)]=skF(s)−sk−1f(0)−⋯−f(k−1)(0)L[∫0tf(t)dt]=s1F(s)L[t1f(t)]=∫s∞F(σ)dσL[tnf(t)]=(−1)nF(n)(s)L[f(at)]=a1F(as)L[estf(t)]=F(s−a)L[f(t−a)u(t−a)]=e−asF(s)


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









